29 Tháng năm 2023 (Tin tức Nanowerk) Researchers from the Department of Mechanical Science and Bioengineering at Osaka University have invented a new kind of walking robot that takes advantage of dynamic instability to navigate. By changing the flexibility of the couplings, the robot can be made to turn without the need for complex computational control systems. This work may assist the creation of rescue robots that are able to traverse uneven terrain.
Most animals on Earth have evolved a robust locomotion system using legs that provides them with a high degree of mobility over a wide range of environments. Somewhat disappointingly, engineers who have attempted to replicate this approach have often found that legged robots are surprisingly fragile. The breakdown of even one leg due to the repeated stress can severely limit the ability of these robots to function.
In addition, controlling a large number of joints so the robot can transverse complex environments requires a lot of computer power. Improvements in this design would be extremely useful for building autonomous or semi-autonomous robots that could act as exploration or rescue vehicles and enter dangerous areas.
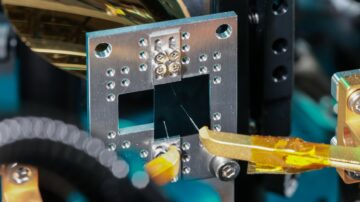
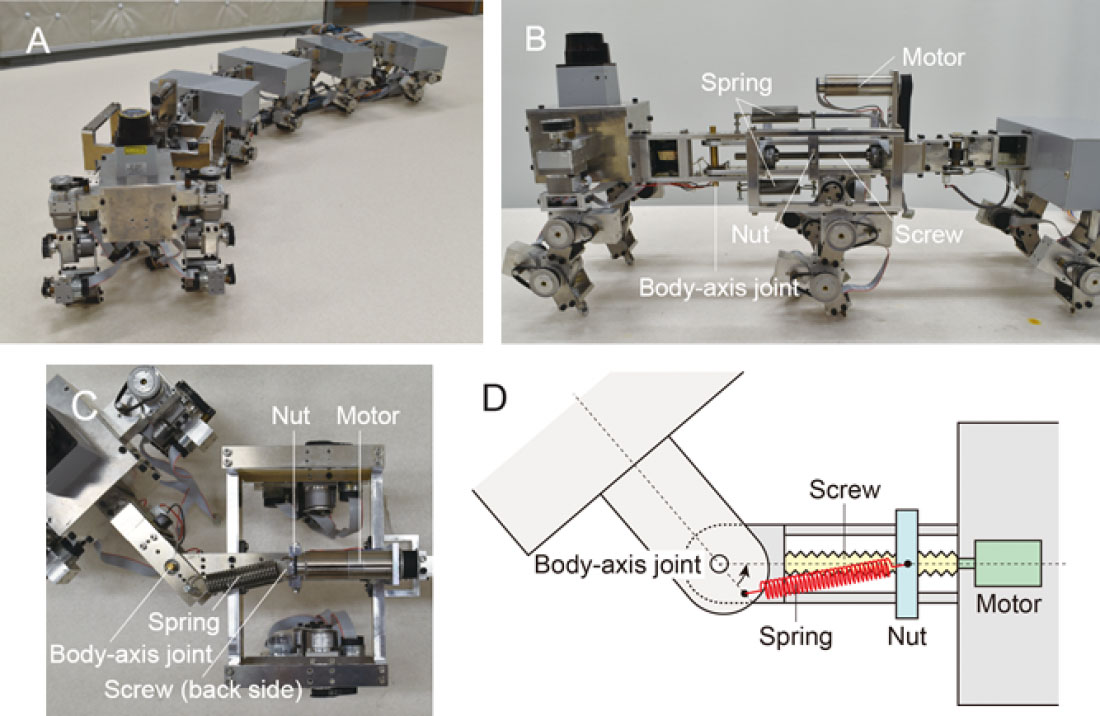 Myriapod robot (A) and Variable body-axis flexibility mechanism (B. Front view, C. Top view, D. Schematics of top view). (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
Now, investigators from Osaka University have developed a biomimetic “myriapod” robot that takes advantage of a natural instability that can convert straight walking into curved motion. In a study published recently in Robot mềm (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), researchers from Osaka University describe their robot, which consists of six segments (with two legs connected to each segment) and flexible joints. Using an adjustable screw, the flexibility of the couplings can be modified with motors during the walking motion.
The researchers showed that increasing the flexibility of the joints led to a situation called a “pitchfork bifurcation,” in which straight walking becomes unstable. Instead, the robot transitions to walking in a curved pattern, either to the right or to the left. Normally, engineers would try to avoid creating instabilities. However, making controlled use of them can enable efficient maneuverability.
“We were inspired by the ability of certain extremely agile insects that allows them to control the dynamic instability in their own motion to induce quick movement changes,” says Shinya Aoi, an author of the study. Because this approach does not directly steer the movement of the body axis, but rather controls the flexibility, it can greatly reduce both the computational complexity as well as the energy requirements.
Myriapod robot (A) and Variable body-axis flexibility mechanism (B. Front view, C. Top view, D. Schematics of top view). (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
Now, investigators from Osaka University have developed a biomimetic “myriapod” robot that takes advantage of a natural instability that can convert straight walking into curved motion. In a study published recently in Robot mềm (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), researchers from Osaka University describe their robot, which consists of six segments (with two legs connected to each segment) and flexible joints. Using an adjustable screw, the flexibility of the couplings can be modified with motors during the walking motion.
The researchers showed that increasing the flexibility of the joints led to a situation called a “pitchfork bifurcation,” in which straight walking becomes unstable. Instead, the robot transitions to walking in a curved pattern, either to the right or to the left. Normally, engineers would try to avoid creating instabilities. However, making controlled use of them can enable efficient maneuverability.
“We were inspired by the ability of certain extremely agile insects that allows them to control the dynamic instability in their own motion to induce quick movement changes,” says Shinya Aoi, an author of the study. Because this approach does not directly steer the movement of the body axis, but rather controls the flexibility, it can greatly reduce both the computational complexity as well as the energy requirements.
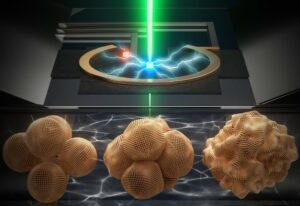
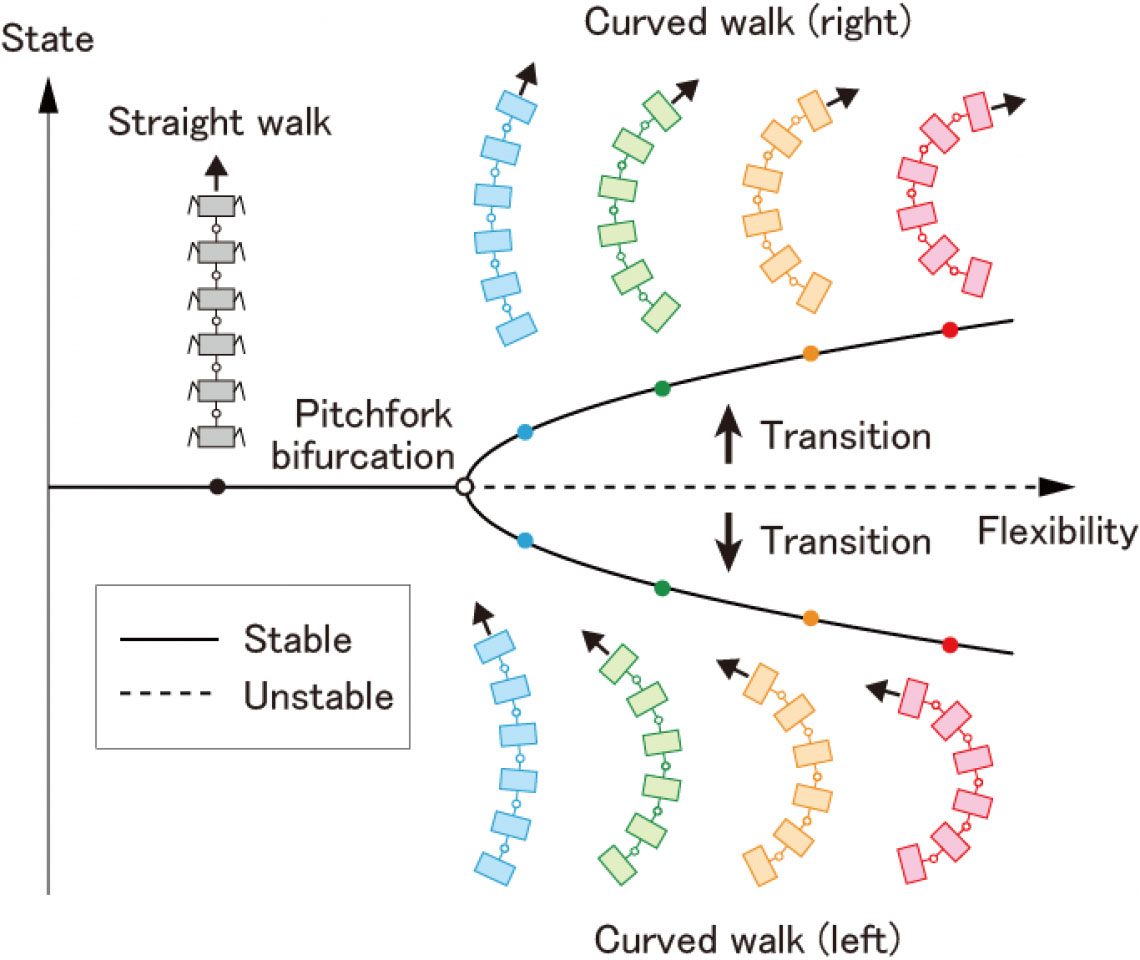 Stable and unstable walking patterns depending on the body-axis flexibility. (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
The team tested the robot’s ability to reach specific locations and found that it could navigate by taking curved paths toward targets. “We can foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments or exploration on other planets,” says Mau Adachi, another study author. Future versions may include additional segments and control mechanisms.
Stable and unstable walking patterns depending on the body-axis flexibility. (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
The team tested the robot’s ability to reach specific locations and found that it could navigate by taking curved paths toward targets. “We can foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments or exploration on other planets,” says Mau Adachi, another study author. Future versions may include additional segments and control mechanisms.
Myriapod robot (A) and Variable body-axis flexibility mechanism (B. Front view, C. Top view, D. Schematics of top view). (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
Now, investigators from Osaka University have developed a biomimetic “myriapod” robot that takes advantage of a natural instability that can convert straight walking into curved motion. In a study published recently in Robot mềm (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), researchers from Osaka University describe their robot, which consists of six segments (with two legs connected to each segment) and flexible joints. Using an adjustable screw, the flexibility of the couplings can be modified with motors during the walking motion.
The researchers showed that increasing the flexibility of the joints led to a situation called a “pitchfork bifurcation,” in which straight walking becomes unstable. Instead, the robot transitions to walking in a curved pattern, either to the right or to the left. Normally, engineers would try to avoid creating instabilities. However, making controlled use of them can enable efficient maneuverability.
“We were inspired by the ability of certain extremely agile insects that allows them to control the dynamic instability in their own motion to induce quick movement changes,” says Shinya Aoi, an author of the study. Because this approach does not directly steer the movement of the body axis, but rather controls the flexibility, it can greatly reduce both the computational complexity as well as the energy requirements.
Stable and unstable walking patterns depending on the body-axis flexibility. (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
The team tested the robot’s ability to reach specific locations and found that it could navigate by taking curved paths toward targets. “We can foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments or exploration on other planets,” says Mau Adachi, another study author. Future versions may include additional segments and control mechanisms.
- Phân phối nội dung và PR được hỗ trợ bởi SEO. Được khuếch đại ngay hôm nay.
- PlatoAiStream. Thông minh dữ liệu Web3. Kiến thức khuếch đại. Truy cập Tại đây.
- Đúc kết tương lai với Adryenn Ashley. Truy cập Tại đây.
- Mua và bán cổ phần trong các công ty PRE-IPO với PREIPO®. Truy cập Tại đây.
- nguồn: https://www.nanowerk.com/news2/robotics/newsid=63068.php
- :không phải
- 10
- 2022
- 2023
- 7
- 8
- 9
- a
- có khả năng
- Có khả năng
- Hành động
- Ngoài ra
- thêm vào
- điều chỉnh
- Lợi thế
- nhanh nhẹn
- AL
- cho phép
- an
- và
- động vật
- Một
- các ứng dụng
- phương pháp tiếp cận
- LÀ
- khu vực
- AS
- hỗ trợ
- At
- đã cố gắng
- tác giả
- tự trị
- tránh
- Trục
- BE
- bởi vì
- trở thành
- thân hình
- cả hai
- Breakdown
- Xây dựng
- nhưng
- by
- gọi là
- CAN
- Trung tâm
- nhất định
- Những thay đổi
- thay đổi
- phức tạp
- phức tạp
- máy tính
- sức mạnh máy tính
- kết nối
- điều khiển
- kiểm soát
- kiểm soát
- điều khiển
- chuyển đổi
- có thể
- Tạo
- tạo
- Nguy hiểm
- Ngày
- Bằng cấp
- bộ
- Tùy
- mô tả
- Thiết kế
- phát triển
- trực tiếp
- làm
- hai
- suốt trong
- năng động
- E&T
- mỗi
- trái đất
- hiệu quả
- hay
- cho phép
- năng lượng
- Kỹ sư
- đăng ký hạng mục thi
- môi trường
- Ngay cả
- phát triển
- thăm dò
- cực kỳ
- Linh hoạt
- linh hoạt
- Trong
- tìm thấy
- từ
- trước mặt
- chức năng
- tương lai
- Go
- rất nhiều
- Có
- Cao
- Tuy nhiên
- HTTPS
- hình ảnh
- cải tiến
- in
- bao gồm
- tăng
- lấy cảm hứng từ
- bất ổn
- thay vì
- trong
- Phát minh
- Các nhà điều tra
- IT
- jpg
- Loại
- lớn
- Led
- trái
- chân
- LIMIT
- . Các địa điểm
- Rất nhiều
- thực hiện
- Làm
- Có thể..
- cơ khí
- cơ chế
- cơ chế
- Tên đệm
- di động
- sửa đổi
- hầu hết
- chuyển động
- Motors
- phong trào
- Tự nhiên
- Điều hướng
- Cần
- Mới
- Thông thường
- tại
- con số
- of
- thường
- on
- ONE
- or
- Nền tảng khác
- kết thúc
- riêng
- Họa tiết
- mô hình
- Hành tinh
- plato
- Thông tin dữ liệu Plato
- PlatoDữ liệu
- quyền lực
- cung cấp
- công bố
- Nhanh chóng
- phạm vi
- hơn
- đạt
- gần đây
- giảm
- lặp đi lặp lại
- Yêu cầu
- đòi hỏi
- giải cứu
- nhà nghiên cứu
- ngay
- Robot
- robotics
- robot
- mạnh mẽ
- nói
- kịch bản
- Khoa học
- Tìm kiếm
- phân khúc
- phân đoạn
- nghiêm trọng
- cho thấy
- tình hình
- Six
- So
- Mềm mại
- phần nào
- riêng
- ổn định
- ngay
- căng thẳng
- Học tập
- như vậy
- hệ thống
- hệ thống
- mất
- dùng
- mục tiêu
- nhóm
- việc này
- Sản phẩm
- cung cấp their dịch
- Them
- Kia là
- điều này
- đến
- hàng đầu
- đối với
- chuyển tiếp
- thử
- XOAY
- hai
- trường đại học
- sử dụng
- sử dụng
- nhiều
- Xe cộ
- thông qua
- Xem
- đi bộ
- TỐT
- là
- cái nào
- CHÚNG TÔI LÀ
- rộng
- Phạm vi rộng
- với
- không có
- Công việc
- đang làm việc
- sẽ
- zephyrnet
Thêm từ công trình nano


Sự tích hợp dựa trên origami của rô-bốt cảm nhận, quyết định và phản hồi
Nút nguồn: 2565107
Dấu thời gian: Tháng Tư 4, 2023
Cấu trúc dị thể dựa trên perovskite hai/gần như hai chiều: Cấu trúc, tính chất và ứng dụng
Nút nguồn: 1938788
Dấu thời gian: Tháng Hai 3, 2023

Các nhà nghiên cứu trình bày chi tiết các đặc tính chưa từng thấy trong họ kim loại Kagome siêu dẫn
Nút nguồn: 1952937
Dấu thời gian: Tháng Hai 11, 2023
Các mạch quang tử tích hợp có thể giúp thu hẹp 'khoảng cách terahertz'
Nút nguồn: 1899339
Dấu thời gian: Jan 14, 2023

Lượng khí thải carbon từ phân bón có thể giảm tới 80% vào năm 2050
Nút nguồn: 1951214
Dấu thời gian: Tháng Hai 11, 2023
Làm thế nào một chất xúc tác nano đồng phá kỷ lục chuyển đổi CO2 thành nhiên liệu lỏng
Nút nguồn: 1961058
Dấu thời gian: Tháng Hai 16, 2023
Các nhà nghiên cứu in 3D mô não người có chức năng
Nút nguồn: 3093799
Dấu thời gian: Tháng Hai 2, 2024
Phát triển công nghệ để giảm chi phí sản xuất hydro xanh
Nút nguồn: 2700260
Dấu thời gian: Tháng Sáu 2, 2023
Mở khóa bí mật của độ xoáy bằng đầu dò có sóng hài cao
Nút nguồn: 2969974
Dấu thời gian: Tháng Mười Một 10, 2023