Bài đăng ngắn này mô tả một số điểm cải tiến của trạm laser mà chúng tôi đã thực hiện để có thể chạy thử nghiệm từ xa.
Sự cố thiết lập
Nền tảng tiêm lỗi laser của chúng tôi được làm bằng kính hiển vi được sử dụng để tập trung nguồn laser xuống thiết bị được thử nghiệm. Nó được trang bị một camera hồng ngoại để quan sát kiến trúc bên trong của con chip được nhắm mục tiêu và điều chỉnh hình dạng chùm tia laze. May mắn thay, nó được trang bị một tầng cơ giới cho phép di chuyển chùm tia laze qua con chip từ ứng dụng phần mềm tùy chỉnh của chúng tôi. Tất cả các công cụ chúng tôi phát triển đều chạy trên hệ điều hành Linux và do đó có thể sử dụng chúng thông qua kết nối SSH, miễn là bạn có kết nối internet tốt. Chúng tôi đã gặp phải một số vấn đề về độ trễ khi xử lý hình ảnh trực tiếp của camera kính hiển vi, chúng tôi đã nhanh chóng giải quyết vấn đề này bằng cách bật tùy chọn nén SSH (-C) không được bật theo mặc định và làm giảm đáng kể băng thông phát trực tuyến cần thiết. Tuy nhiên, tại thời điểm đó, một số yếu tố vẫn cần can thiệp tại chỗ:
- Điều khiển nguồn sáng camera: thiết bị chuyên dụng cung cấp ánh sáng hồng ngoại chiếu vào chip để quan sát camera.
- Mở hoặc đóng cửa chớp máy ảnh cơ học: cửa chớp này là một phần của kính hiển vi và phải được đóng lại khi sử dụng tia laser.
- Thay đổi vật kính kính hiển vi: 4 vật kính quang học khác nhau được gắn trên một tháp quay cơ học và cho phép các độ phóng đại kính hiển vi khác nhau.
Dưới đây là chi tiết cách chúng tôi tùy chỉnh băng thử nghiệm của mình để điều khiển màn trập và nguồn sáng từ xa. Đặc biệt, chúng tôi muốn giới hạn chi phí của những điều chỉnh đó và cung cấp nó càng sớm càng tốt.
Kiểm soát nguồn sáng
Chất nền silicon của chất bán dẫn là bán trong suốt đối với ánh sáng hồng ngoại và với camera hồng ngoại, do đó có thể quan sát cấu trúc bên trong của các mạch. Để có thể quan sát được, mạch phải được chiếu sáng bằng nguồn sáng hồng ngoại. Kính hiển vi laser của chúng tôi đã được vận chuyển với một thiết bị nguồn sáng chuyên dụng, một Hayashi LA-150CE, có công tắc nguồn và núm điều chỉnh cường độ ánh sáng, như mô tả bên dưới. Khi bắt đầu chiến dịch thử nghiệm laser, chúng tôi thường tắt nguồn sáng vì nó có thể gây nhiễu các thành phần, đặc biệt là khi các mẫu được làm mỏng.

Nhìn vào mặt sau của thiết bị, chúng tôi thấy có sẵn một công tắc “từ xa” và một đầu nối bên ngoài. Chúng tôi hiểu rằng nguồn sáng này cung cấp khả năng điều khiển từ xa thông qua một số đầu nối thiên niên kỷ trước. Có thể tìm thấy ít tài liệu trên web, nhưng chúng tôi đã xác định được trong danh mục Hayashi có tồn tại một Bộ điều khiển mạng LAN tương thích với nguồn sáng này. Tuy nhiên sản phẩm này đã ngừng sản xuất. Ngoài ra, kết nối mạng LAN không thuận tiện lắm. Trong cùng một danh mục, chúng tôi đã tìm thấy thông số kỹ thuật cho đầu nối của nguồn sáng. Mặc dù nó không phải là rất chi tiết, nhưng nó là đủ để thử điều này.
Sơ đồ chân điều khiển từ xa từ danh mục sản phẩm Hayashi: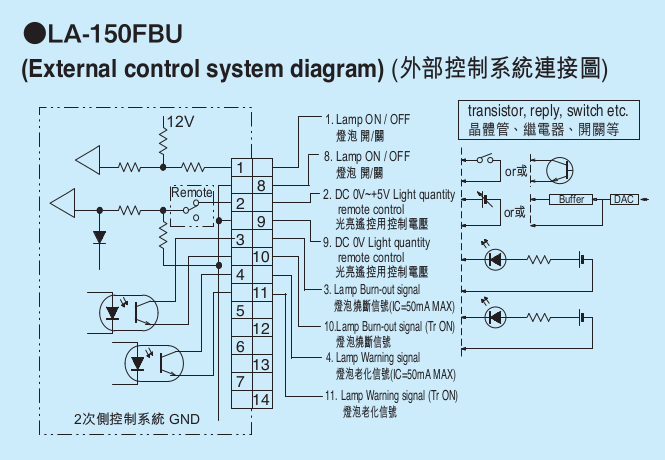
Giao diện này cung cấp hai tính năng thú vị chính:
- Chân kỹ thuật số 1 và 8 có thể được sử dụng để bật và tắt đèn bằng cách rút ngắn chúng hoặc không. Chân 8 thực sự là mặt đất, vì vậy chỉ có chân 1 là thực sự phù hợp.
- Chân analog 2 điều khiển cường độ ánh sáng với tín hiệu nằm trong khoảng từ 0 V (cường độ tối thiểu) đến 5 V (cường độ tối đa). Khi bật chế độ từ xa, chiết áp của bảng điều khiển phía trước sẽ được bỏ qua và cường độ ánh sáng được điều khiển trực tiếp bởi chân này.
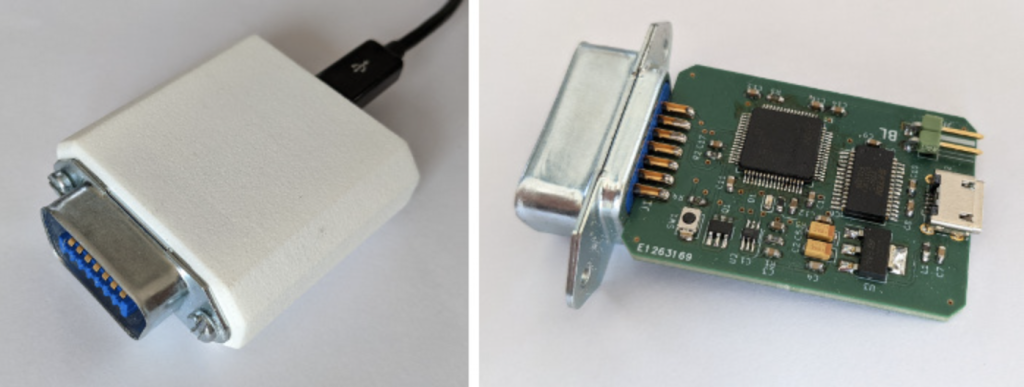
Chúng tôi quyết định xây dựng từ đầu Bộ điều khiển từ xa ánh sáng Hayashi sử dụng các phần sau:
- Một bộ vi điều khiển STM32 để lưu trữ mã ứng dụng nhúng,
- Bộ chuyển đổi USB-to-serial FT232 để cho phép điều khiển dongle từ USB,
- Bộ chuyển đổi kỹ thuật số sang tương tự AD5621B để tạo tín hiệu tương tự 0 đến 5V để kiểm soát cường độ ánh sáng.
Chúng tôi đã thiết kế PCB bằng cách sử dụng KiCad. Thành thật mà nói, thiết kế này có thể hơi quá khổ: bộ vi điều khiển quá lớn so với nhu cầu hiện tại và FT232 có thể bị loại bỏ do các thiết bị STM32 đã có khả năng USB, với chi phí là thời gian phát triển phần mềm. Mục tiêu của chúng tôi là làm cho nó nhanh và bẩn và tái sử dụng một số sơ đồ đã được thiết kế sẵn của chúng tôi.
Để giải trí và vì chúng tôi tin rằng đây là một ngôn ngữ rất hứa hẹn nên chúng tôi đã phát triển chương trình cơ sở vi điều khiển trong Rust.
Cuối cùng chúng tôi đã thiết kế một hộp nhựa đơn giản bằng cách sử dụng FreeCAD, và in nó với điêu khắc.
Thật bất ngờ, phần khó khăn nhất của dự án này là xác định đầu nối (tham khảo 5710140 từ Amphenol cho phía nam), đồng thời mua nó vì nó đã lỗi thời và không được nhiều nhà cung cấp bán nữa. Công cụ tìm kiếm nhà cung cấp phụ tùng bạch tuộc có thể giúp đỡ.
Tất cả các sơ đồ và các tập tin thiết kế có sẵn trên của chúng tôi Kho GitHub.
Điều khiển màn trập máy ảnh
Trong kính hiển vi, chùm tia laze và máy ảnh có chung một đường quang học. Khi tia laser đang bắn, một phần ánh sáng bị phản xạ bởi silicon và sẽ chiếu vào máy ảnh. Để tránh làm hỏng cảm biến có thể dẫn đến điểm ảnh chết trong thời gian dài, có thể đóng cửa trập cơ học quang học ở phía trước máy ảnh. Màn trập là thủ công và cần ít hoặc không cần lực tác động.
Để có thể điều khiển từ xa, chúng tôi đã mua một động cơ bước nhỏ và một Bộ điều khiển động cơ bước TIC T834 từ Polulu. Chúng tôi đã phát triển và in các bánh răng 3D và thân để gắn trên kính hiển vi nhằm di chuyển cửa trập bằng động cơ.
TIC T834 yêu cầu nguồn điện để cung cấp năng lượng cho động cơ, nhưng vì động cơ của chúng tôi không tiêu thụ nhiều dòng điện nên chúng tôi đã rút ngắn nguồn điện USB của T834 để cấp nguồn cho động cơ. Bộ điều khiển TIC rất dễ cài đặt và sử dụng, nó được ghi lại đầy đủ và chúng tôi mất rất ít thời gian để điều khiển động cơ từ các công cụ phần mềm của mình. Chúng tôi đã phát triển một lớp trình điều khiển nhỏ bằng Python hiện được tích hợp trong giai đoạn mủ thư viện.
Bộ điều khiển động cơ bước cần tìm ra vị trí động cơ hiện tại khi bật nguồn. Điều này được thực hiện với quy trình khởi tạo trong đó động cơ sẽ quay cho đến khi một công tắc tiếp điểm báo cho bộ điều khiển biết rằng động cơ đang ở vị trí 834. Chúng tôi đã sử dụng một công tắc đơn giản được kết nối trực tiếp với TXNUMX có tích hợp tính năng này.
Phần thân xe 3D chúng tôi in không được chính xác lắm và lần đầu tiên hai bánh răng hoạt động không chính xác. Dùng nhiệt chúng tôi có thể uốn cong nhẹ phần nhựa để điều chỉnh khe hở giữa các bánh răng. Sau một vài điều chỉnh, chúng tôi đã có thể mở và đóng cửa trập máy ảnh từ xa một cách hoàn hảo!
thiết kế cơ khí có sẵn trên của chúng tôi Kho GitHub.
Lời cuối
Việc tích hợp điều khiển nguồn sáng và màn trập máy ảnh cho phép chúng tôi chạy nhiều chiến dịch thử nghiệm laser từ xa. Nó cũng thuận tiện hơn trước đây, vì giờ đây việc đóng cửa trập và tắt đèn có thể được thực hiện tự động khi bật tia laser, trong khi trước đây nó cần sự can thiệp của con người và có thể dễ dàng bị lãng quên.
Liên quan đến việc điều khiển tháp pháo mục tiêu, đã tồn tại tháp pháo cơ giới, nhưng tiếc là chúng khá đắt và có thể khó thay thế. Hiện tại, chúng tôi không tìm thấy bất kỳ giải pháp đơn giản và chi phí thấp nào. Xoay tháp pháo bằng một động cơ bên ngoài rất khó, đặc biệt là vì có một lò xo khóa tháp pháo tại chỗ khi vật kính được căn chỉnh với kính hiển vi. Ngoài ra, trọng lượng chúng ta có thể thêm vào giai đoạn cơ giới bị hạn chế. Đây vẫn là một vấn đề mở vào lúc này, nhưng nó không ngăn cản hoạt động từ xa, chúng tôi chỉ giới hạn ở độ phóng đại đã chọn.
Cuối cùng, việc thay thế mẫu khi nó bị hỏng vẫn yêu cầu quyền truy cập vào phòng thí nghiệm. May mắn thay, nó không xảy ra quá thường xuyên. Cuối cùng, chúng tôi có thể ghép nhiều mạch trên một bảng mạch con duy nhất, vì vậy chúng tôi có thể ghi một vài thiết bị trước khi cần thay thế vật lý, tuy nhiên chúng tôi đã không phát triển một giải pháp như vậy.

- Phân phối nội dung và PR được hỗ trợ bởi SEO. Được khuếch đại ngay hôm nay.
- PlatoAiStream. Thông minh dữ liệu Web3. Kiến thức khuếch đại. Truy cập Tại đây.
- Đúc kết tương lai với Adryenn Ashley. Truy cập Tại đây.
- Mua và bán cổ phần trong các công ty PRE-IPO với PREIPO®. Truy cập Tại đây.
- nguồn: https://www.ledger.com/blog/laser-improvements
- : có
- :là
- :không phải
- :Ở đâu
- 1
- 14
- 24
- 3d
- 8
- a
- Có khả năng
- truy cập
- chính xác
- ngang qua
- thực sự
- Chuyển thể
- thêm vào
- điều chỉnh
- Sau
- căn chỉnh
- Tất cả
- cho phép
- cho phép
- Đã
- Ngoài ra
- an
- và
- bất kì
- nữa không
- Các Ứng Dụng
- kiến trúc
- LÀ
- AS
- At
- tự động
- có sẵn
- Băng thông
- BE
- Chùm tia
- bởi vì
- trước
- Tin
- phía dưới
- giữa
- lớn
- Một chút
- thân hình
- mua
- Bị phá vỡ
- xây dựng
- được xây dựng trong
- ghi
- nhưng
- by
- máy ảnh
- Chiến dịch
- Chiến dịch
- CAN
- khả năng
- Danh mục hàng
- Chip
- tốt nghiệp lớp XNUMX
- Đóng
- đóng cửa
- đóng cửa
- mã
- tương thích
- các thành phần
- kết nối
- liên quan
- Kết nối
- liên lạc
- điều khiển
- kiểm soát
- điều khiển
- kiểm soát
- điều khiển
- Tiện lợi
- sửa chữa
- Phí Tổn
- có thể
- Current
- khách hàng
- tùy chỉnh
- chết
- xử lý
- quyết định
- dành riêng
- Mặc định
- Thiết kế
- thiết kế
- chi tiết
- phát triển
- phát triển
- Phát triển
- thiết bị
- Thiết bị (Devices)
- ĐÃ LÀM
- khác nhau
- khó khăn
- trực tiếp
- tài liệu hướng dẫn
- làm
- thực hiện
- xuống
- vẽ tranh
- suốt trong
- dễ dàng
- dễ dàng
- các yếu tố
- nhúng
- kích hoạt
- năng lượng
- cải tiến
- đủ
- Trang thiết bị
- đã trang bị
- đặc biệt
- cuối cùng
- tồn tại
- tồn tại
- đắt tiền
- thí nghiệm
- ngoài
- phải đối mặt
- lỗi
- Đặc tính
- Tính năng
- vài
- Các tập tin
- Cuối cùng
- Tìm kiếm
- Tên
- lần đầu tiên
- Tập trung
- tiếp theo
- Trong
- Buộc
- quên
- May mắn thay
- tìm thấy
- phân số
- từ
- trước mặt
- vui vẻ
- khoảng cách
- thế hệ
- mục tiêu
- tốt
- rất nhiều
- Mặt đất
- xảy ra
- Cứng
- Có
- giúp đỡ
- Đánh
- chủ nhà
- Độ đáng tin của
- Tuy nhiên
- HTTPS
- Nhân loại
- xác định
- xác định
- hình ảnh
- in
- tích hợp
- thú vị
- Giao thức
- can thiệp
- nội bộ
- Internet
- kết nối Internet
- can thiệp
- vấn đề
- các vấn đề
- IT
- chỉ
- phòng thí nghiệm
- Ngôn ngữ
- tia laser
- Độ trễ
- vấn đề về độ trễ
- Ledger
- Thư viện
- ánh sáng
- LIMIT
- Hạn chế
- linux
- ít
- sống
- Khóa
- dài
- Rất nhiều
- chi phí thấp
- thực hiện
- Chủ yếu
- làm cho
- Làm
- nhãn hiệu
- nhiều
- max-width
- tối đa
- Có thể..
- cơ khí
- Kính hiển vi
- Thiên niên kỷ
- tối thiểu
- Chế độ
- thời điểm
- chi tiết
- hầu hết
- động cơ
- di chuyển
- di chuyển
- phải
- Cần
- cần
- Không
- tại
- Mục tiêu
- mục tiêu
- tuân theo
- lỗi thời
- of
- off
- Cung cấp
- thường
- on
- có thể
- mở
- hoạt động
- hệ điều hành
- Tùy chọn
- or
- gọi món
- vfoXNUMXfipXNUMXhfpiXNUMXufhpiXNUMXuf
- ra
- đại dịch
- bảng điều khiển
- một phần
- riêng
- các bộ phận
- qua
- con đường
- vật lý
- chân
- Nơi
- nhựa
- nền tảng
- plato
- Thông tin dữ liệu Plato
- PlatoDữ liệu
- vị trí
- có thể
- Bài đăng
- quyền lực
- Điện nguồn
- -
- ngăn chặn
- Sản phẩm
- Sản phẩm
- dự án
- hứa hẹn
- cho
- cung cấp
- cung cấp
- mua
- Python
- Nhanh chóng
- Mau
- khác nhau,
- có thật không
- làm giảm
- phản ánh
- có liên quan
- xa
- Đã loại bỏ
- thay thế
- thay thế
- cần phải
- đòi hỏi
- kết quả
- tái sử dụng
- chạy
- Rust
- tương tự
- Tìm kiếm
- chọn
- Chất bán dẫn
- thiết lập
- Hình dạng
- Chia sẻ
- vận chuyển
- chụp
- ngắn
- Quá thiếu
- Rút ngắn
- bên
- Tín hiệu
- Silicon
- Đơn giản
- kể từ khi
- duy nhất
- nhỏ
- So
- Phần mềm
- phát triển phần mềm
- bán
- giải pháp
- một số
- Chẳng bao lâu
- nguồn
- đặc điểm kỹ thuật
- Quay
- mùa xuân
- Traineeship
- bắt đầu
- trạm
- Vẫn còn
- STM32
- trực tuyến
- cấu trúc
- như vậy
- nhà cung cấp
- cung cấp
- Công tắc điện
- hệ thống
- nhắm mục tiêu
- nói
- thử nghiệm
- Kiểm tra
- hơn
- việc này
- Sản phẩm
- Them
- Đó
- vì thế
- họ
- điều này
- những
- Tuy nhiên?
- Thông qua
- thời gian
- đến
- quá
- mất
- công cụ
- thử
- Quay
- Quay
- hai
- Dưới
- hiểu
- không may
- cho đến khi
- us
- usb
- sử dụng
- đã sử dụng
- sử dụng
- thường
- rất
- hình dung
- muốn
- là
- we
- web
- trọng lượng
- TỐT
- là
- khi nào
- cái nào
- sẽ
- với
- đang làm việc
- làm việc từ xa
- nhưng
- bạn
- zephyrnet
- không