Magnetisk-elastisk fotoresistpreparat
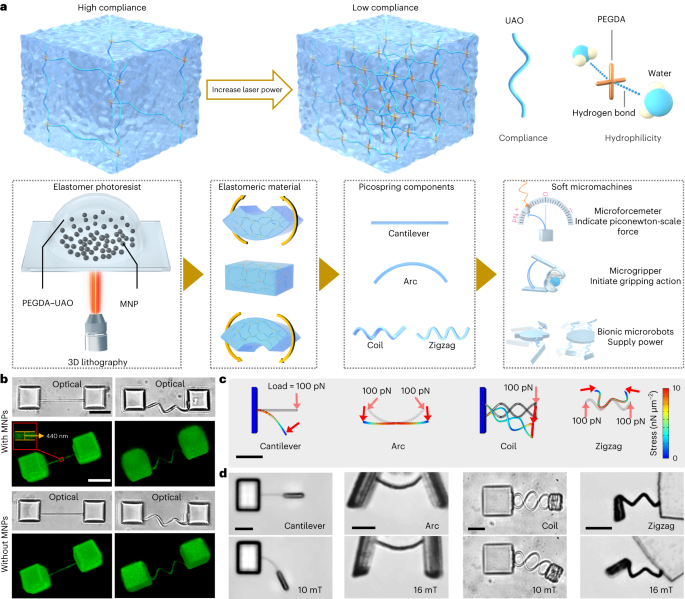
Alle kjemikalier ble kjøpt fra Sigma-Aldrich med mindre annet er spesifisert. Den elastiske fotoresisten besto av uretanakrylatoligomer 70 vekt%, poly(etylenglykol)diakrylat 28.40 vekt% som tverrbinder, 1-(4-(2-(dimetylamino)etoksy)fenyl)-2-fenyl-1-butanon 1.5 vekt % som fotoinitiator, og et kompleks av 2,2,6,6-tetrametylpiperidin-1-oksyl 0.05 vekt% og metylmetakrylat 0.05 vekt% som bråkjøler. Blandingen ble boblet med nitrogen i 30 minutter og vakuumert i 30 minutter for å avgasse. MNP-er ble utarbeidet basert på en klassisk samutfellingsmetode. Kort fortalt, 5.38 g FeCl3· 6H2O og 1.98 g FeCl2· 4H2O ble oppløst i 200 ml H2O. Deretter ble 7 ml 25 % ammoniumhydroksid tilsatt i blandingen, som ble kontinuerlig omrørt i 3 timer. De oppsamlede partiklene ble deretter vasket med vann tre ganger og ytterligere modifisert med 3-(trimetoksysilyl)propylmetakrylat i etanol i konsentrasjoner på 1 vekt% og 0.5 vekt% ved 80 °C i 1 time (ref. 20). MNP-er ble samlet etter vask med etanol tre ganger. Den magnetisk-elastiske fotoresisten ble fremstilt ved å blande MNP-er i den elastiske fotoresisten i en konsentrasjon på 5 % eller 10 % for den spesielle mikroskilpadden som inneholder dobbel konsentrasjon av MNP. Til slutt ble den magnetisk-elastiske fotoresisten boblet med N2 i 30 min og støvsuget i 30 min. Forberedt fotoresist bør alltid oppbevares fra lys ved 4 °C før bruk.
Numerisk analyse
For å designe mikrostrukturene effektivt basert på materialegenskapene, ble simuleringer utført for å forutsi formformingen til mikrostrukturene før fabrikasjon. For resultatene presentert i fig. 1d og 6dog utvidede data fig. 3 og 7, brukte vi en brukerdefinert multifysikkmodul av den kommersielle endelige elementanalyseprogramvaren Comsol. Alle faste stoffer og væsker ble sett på som inkompressible. Youngs modul E ble satt til 0.422 MPa for mikrokraftmetrene og 1.525 MPa for de andre elastiske komponentene, i henhold til mekaniske karakteriseringsresultater av utkragende picospring. Poisson-forholdet for alle materialer ble satt til 0.49, forutsatt at materialet er nesten inkompressibelt. I alle simuleringer ble sædmediet (SP-TALP) satt som en newtonsk væske med en tetthet på 103 kg m-3 og viskositet på 1 mPa s. Under finite element-analyse ble den påførte lasten gitt som en funksjon av det magnetiske dreiemomentet i det lokale koordinatsystemet. Det magnetiske dreiemomentet Tm ble beregnet ved å bruke en forenklet funksjon brukt på det myke magnetiske materialet51:
$$begin{array}{l}{T}^{{mathrm{m}}}=frac{chi V}{mu}{B}^{2},sin left(theta -arctanleft(tantheta ganger frac{1 +0.118chi }{1+0.432chi }høyre)høyre)sqrt{{venstre(frac{costheta }{1+0.118chi}høyre)}^{2}+{venstre(frac{sintheta }{1+0.432chi } høyre)}^{2}}end{array}$$
hvor θ er vinkelen fra magnetfeltet med en flukstetthet på B til den enkle magnetiske aksen til segmentet; χ, V og μ representerer den magnetiske følsomheten og bulkvolumet til segmentet, og den magnetiske permeabiliteten til vann (se detaljer i tilleggstekst 2). Grenselastene til mekanikksimuleringen ble påført parallelt med tverrsnittet av de elastiske fjærene i det lokale koordinatsystemet. De magnetiske dreiemomentene påført på flipperne til mikroskilpadden vist i fig. 6d ble beregnet i henhold til ligningen ovenfor, ved å forenkle svømmeføtter som rektangulære former som projeksjon i to dimensjoner.
Mikropingvinen ble videre analysert med en kinematisk modell løst ved Runge – Kutta fjerde-ordens iterative metode med MATLAB. Som vist i utvidede data Fig. 6d, mikropingvinsvømmene og torsoen ble forenklet som cuboids. De elastiske komponentene ble forenklet som lineære fjærer. Bøyestivheten til den elastiske komponenten ble oppnådd ved å tilpasse det balanserte magnetiske dreiemomentet med hensyn til avbøyningsvinkelen, som måles som halvparten av den varierte vinkelen til to svømmeføtter ved hvert magnetfelt. Ytterligere simuleringsparametere finnes i tilleggstekst 2. Simuleringsresultatene ble deretter brukt til å veilede utformingen og fabrikasjonen av mikrostrukturene, og ble videre validert av de eksperimentelle resultatene.
Fremstilling av mikrostruktur
Mikrostrukturer ble fremstilt ved å bruke et 3D direkte laserskrivingssystem (Photonic Professional GT, Nanoscribe). Under fabrikasjonen ble lasereffekten satt til 25.0 mW for alle stive deler, 5.5 mW for de kraftfølende picofjærene og 6.0 mW for alle de andre elastiske komponentene, med mindre annet er spesifisert. Etter eksponering ble prøven utviklet i aceton i 24 timer for å fjerne alle upolymeriserte komponenter. Som vist i utvidede data Fig. 1a, ble miljøet endret fra aceton til vannbasert medium med pluronsyre F127 (PF127) som fortykningsmiddel gradvis med en hastighet på 200 μl min.-1 i 12 timer. Etter det ble løsningen forsiktig erstattet med SP-TALP med pipette. Strukturell integrering av de picospring-baserte mikrostrukturene ble godt bevart etter disse operasjonene (Utvidede data Fig. 1b). Spesielt i mikrogriper-eksperimentet ble SP-TALP dessuten erstattet av et cellemedium som etterligner eggledervæske (cellemedium som inneholder 0.4 % metylcellulose)52.
Under fremstillingen av mikrooscillatoren, spiralfjærmikrooscillatoren og mikrokraftmeteret, ble glasssubstratet silanisert før bruk for å unngå at mikrostrukturene løsner fra underlaget. 3-(trimetoksysilyl)propylmetakrylat ble brukt til å feste metakrylatterminale grupper på substratet, og danne en kovalent kobling mellom glasssubstratet og den magnetisk-elastiske fotoresisten53.
Under fremstillingen av mikroskilpadden ble eksponeringen utført to ganger ved å bruke fotoresisten med og uten MNP-er. Først ble den elastiske fotoresisten uten MNP-er brukt til å fremstille overkroppen. Etter det ble fotoresisten erstattet med magnetisk-elastisk fotoresist. Glasssubstratet ble limt med en glasskapillær som en justeringsindikator for å bli justert til de tidligere markerte hakelinjene på prøveholderen for å justere prøven til samme posisjon som den første eksponeringen. Opprinnelsen ble funnet igjen basert på posisjonen til den fabrikerte torsoen og strukturkoden ble korrigert med en spesifikk vinkel basert på orienteringsendringen til torsoen for å øke fabrikasjonsnøyaktigheten maksimalt. Deretter ble den andre eksponeringen utført for å fremstille svømmeføtter og elastiske komponenter.
Material karakterisering
Et konfokalt laserspektrummikroskop (Zeiss LSM 980) ble brukt for å oppnå 3D-geometrien til mikrokraftmeteret ved eksitasjonslaser på 488 nm og emisjonsdeteksjon på 580 nm. ImageJ ble brukt til å generere 3D-modellen av strukturen og måle dimensjonene.
Den elastiske egenskapen til utkrageren ble kalibrert av et optisk fellesystem (Lumicks C-Trap). Fem mikrometer polystyrenmikrokuler ble brukt til å kalibrere laserkraften til den optiske fellen, noe som ga fangekraftkonstantene til visse laserkrefter. Mikroperler ble deretter trukket for å deformere mikrokraftmåleren så sakte som mulig, slik at dragkraften kunne neglisjeres. Bøyekurven til mikrokraftmåleren med hensyn til den påførte kraften kan deretter bestemmes ved å registrere posisjonene til mikroperlen og avbøyningsvinklene til utkragingen (se detaljer i tilleggsteksten 1.2). Hver gruppe målinger ble gjentatt på tre prøver. Bilder og videoer ble analysert med ImageJ og data ble utstyrt med OriginPro. Viskositeten til SP-TALP ble tatt som 1 mPa s. Den mekaniske karakteriseringen av de stive delene produsert ved 25 mW ble gjort ved å bruke en AFM, vist i tilleggsfigur. 3 (se detaljer i tilleggstekst 1.2).
Magnetiseringsegenskapen til materialet ble karakterisert av et superledende kvanteinterferensmagnetometer (SQUID, Quantum Design) ved romtemperatur med magnetiske felt opp til 100 mT. Prøvene ble forberedt som en rekke av 8,848 15 rektangulære faste stoffer med en lengde på 16 μm og snittareal på XNUMX μm2. Volumfølsomheten ble beregnet til 0.1220, ved å tilpasse magnetiseringen med hensyn til det påførte feltet ved å bruke OriginPro-programvaren.
Fremdriftskraftmåling med mikrokraftmåler
De sperm-motoriske mikrorørene, rørformede mikrostrålene og mikroheliksene ble alle fremstilt av TPL ved bruk av IP-DIP som fotoresist. Etter eksponering ble prøvene tørket i en kritisk punkttørker etter 20 minutters utvikling i mr-Dev 600 (Micro Resist) og vasket tre ganger med isopropanol. Metalllag av Fe (10 nm)/Ti (5 nm) ble belagt på de sperm-motoriske mikrorørene og mikroheliksene ved sputtering. Lag av Fe (10 nm)/Ti (5 nm)/Pt (10 nm) ble belagt på den rørformede mikrostrålen ved e-stråleavsetning. Bovine spermier ble fremstilt etter den tidligere rapporterte protokollen2. Alle prøvene ble behandlet i PF127-løsning (1%) i 0.5 timer før bruk. Målingen av spermmotorene ble utført i mikrokraftmeterkammeret med 1 ml SP-TALP inneholdende ca.3 mikrorør og 104 sperm. Sædmotoren ble dannet når en sperm ble begrenset i et mikrorør ved tilfeldig svømming. Sædmotoren ble deretter styrt av det eksterne magnetfeltet, på rundt 2 mT, mot handlingsstangen til mikrokraftmåleren. Magnetfeltet ble justert vinkelrett på handlingsstangen for å unngå påvirkning av det magnetiske dreiemomentet på utkragingsdeformasjonen. Målingen av mikrostrålene ble utført i SP-TALP som inneholdt 1 % H2O2 og 0.1 % natriumdodecylsulfat. Omtrent 20 mikrostråler ble tilsatt og ledet på samme måte som sædmotorene. Målingen av mikroheliksene ble utført ved å påføre et roterende magnetfelt på 10 mT ved 40 Hz for magnetisk aktivering. Fremdriftskraften, det vil si den elastiske kraften når sperm-motorhastigheten er null, ble beregnet ved lineær interpolasjon i kalibreringskurven til mikrokraftmeteret bortsett fra fremdriftskraften til mikrojetflyet, som ble hentet fra simuleringskurven for finitt elementanalyse. av det korte mikrokraftmåleren. Alle målinger ble utført ved 37 °C med mindre annet er spesifisert. Videoer og data ble analysert av ImageJ og OriginPro. Elastiske krefter ble beregnet ved interpolasjon i mikrokraftmeter-kalibreringskurven i fig. 3c,d.
Magnetisk kontroll av mikrogriperen
Den magnetiske aktiveringen ble utført av et elektromagnetsystem (Magnebotix MFG 100-i). De tidssekvensielle magnetfeltene ble generert ved å designe Bx, By og Bz med stykkevise funksjoner. Etter mediebytteprosessen ble mikrorobot- og mikrogriperprøvene behandlet i ultralydbadet i 5 minutter. Deretter ble en 100 μl pipette brukt til å blåse prøvene forsiktig med media for å løsne mikrostrukturene helt fra underlaget uten silanisering. I eksperimentene med mikroroboter ble prøvene deretter direkte spredt i SP-TALP og operert i magnetfeltet. I eksperimentene med mikrogriperen ble prøveløsningen tilsatt forhåndsforberedte mikroobjekter (mikrokuler og mikroklotter). Mikrokuleprøven ble oppnådd ved direkte å dispergere 5 μm polystyren mikroperler ved ca. 103 ml-1 som vist i fig. 4c,f. De proteinbaserte mikroklumpene ble syntetisert med bovint serumalbumin ved å bruke en mikroemulsjonsmetode som rapportert tidligere2. Den oviduct-væske-etterlignende løsningen ble fremstilt basert på HeLa-cellemediet inneholdende 0.4 % metylcellulose for å etterligne den viskoelastiske egenskapen til væsken. Roterende magnetiske felt ble påført for bevegelsen til mikrogriperen på en rullende måte, og jevne magnetiske felt ble påført for å åpne gripeskuffen. Videoer og data ble håndtert med ImageJ og OriginPro.
Etter manipulering av HeLa-cellene ble målcellen farget av et levende/dødt fargesett som inneholdt fluoresceindiacetat og propidiumjodid. Etter en inkubasjonsperiode på 10 minutter ble flerkanals fluorescensbilder tatt ved bruk av eksitasjon ved en bølgelengde på 470 nm for levende celler (emisjonsbølgelengde 530 nm) og 540 nm for døde celler (emisjonsbølgelengde 618 nm). Deretter ble mål-HeLa-cellen dyrket inne i mikrogriperens bøtte i ytterligere 4 timer. En andre manipulasjon ble deretter utført for å transportere HeLa-cellen langs en rektangulær bane. Etter denne manipulasjonen ble det igjen tatt fluorescensbilder. Tilstedeværelsen av grønn fluorescens av målcellen etter manipulering indikerte at mikrogriperen ikke hadde noen negativ innvirkning på cellens levedyktighet under manipulering, i motsetning til den røde fluorescensen observert i tilfeldig døde celler. Kontrollen av celleorientering vist i fig. 4g ble implementert ved å endre retningen til den påførte magnetfeltvektoren etter at mikrogriperen hadde grepet celleklyngen. Et jevnt magnetfelt på 6 mT ble påført langs +x retning for å gripe og definere den innledende orienteringen til celleklyngen. For å endre celleorienteringen i x-y (yaw) eller x-z (pitch) plan, ble magnetfeltvektorene ganske enkelt rotert langs z or y akser uansett grad på forespørsel. For å endre celleorienteringen i y-z plan (rulle), ble et annet roterende magnetfelt ved 2 mT og 20 Hz påført. Orienteringen til celleklyngen i y-z planet ble endret ved å endre rotasjonsaksen til det roterende magnetfeltet, mens det jevne magnetfeltet på 6 mT ble holdt langs +x akser.
Magnetisk kontroll av mikropingvinen og mikroskilpadden
Mikroroboter med tidssymmetrisk bevegelse kan ikke oppnå en netto forskyvning ved lavt Reynolds-tall54. En effektiv strategi for å bryte tidssymmetri er å gjøre mikrorobotens orientering under morphing forskjellig fra orienteringen under restitusjon. Som en demonstrasjon implementerer vi en orienteringsbyttestrategi for å kontrollere mikropingvinen. Utvidet data Fig. 6a viser sekvensene til magnetfeltene med en syklusvarighet på 9 s som vist i fig. 6a: 0–1 s, ble et jevnt magnetfelt på 16 mT påført langs x akse (fase 1–2); 1–1.5 s, rotasjonsmagnetfelt på 16 mT langs y akser; 1.5–2.5 s, jevnt magnetfelt på 2 mT langs z akse (fase 2–3); 2.5–4.5 s, rotasjonsmagnetfelt på 2 mT langs y akser; 4.5–5.5 s, jevnt magnetfelt på 16 mT langs x akse (fase 3–4); 5.5–6 s, rotasjonsmagnetfelt på 16 mT langs y akser; 6–7 s, jevnt magnetfelt på 2 mT langs z akse (fase 4–1); 7–9 s, rotasjonsmagnetfelt på 2 mT langs y akser. Etter en syklus på 9 s, gjenoppretter mikropingvinen sin opprinnelige orientering og får en netto forskyvning langs x akser. Utvidet data Fig. 6b viser magnetfeltsekvensene med en syklusvarighet på 5.5 s av mikropingvinen på en mer effektiv svømmemåte. I dette tilfellet ble de ensartede og rotasjonsmagnetiske feltene blandet, noe som muliggjorde samtidig mikropingvinrotasjon og flipperåpning og lukking.
En ulempe med styringsstrategien for orienteringsbytte er den samtidige rotasjonen av hele roboten, til tross for dens universelle anvendelighet på elastiske mikroroboter for å generere en netto forskyvning. Denne rotasjonen kan unngås ved å bruke et sett med picosprings som driver forskjellige bevegelige deler av mikroroboter med inhomogen magnetisering, for eksempel mikroskilpadden. Utvidet data Fig. 7a viser simuleringsresultatene for finite element-analyse, som hjelper til med å finne de mest effektive retningene til magnetfeltene. Magnetfeltsekvensen til den endelige kontrollstrategien er vist i utvidet data fig. 7b. Bare ensartede magnetiske felt er nødvendig for å generere en netto forskyvning for mikroskilpadden på grunn av de koordinerte aktiverings- og bufferfunksjonene til venstre og høyre par picosprings som kontrollerer forskjellige svømmeføtter. Mikroskilpadden ble da bare kontrollert til å bevege seg i to dimensjoner av x-y plan uten rotasjon eller forskyvning i z akse: 0–1 s, 2 mT langs 15° (mot klokken som positiv) retning fra +y retning (symmetrisk akse til mikroskilpadden); 1–1.5 s, 2 mT langs −75° fra +y; 1.5–2.5 s, 16 mT langs -105° langs +y; 2.5–3 s, 2 mT langs +y. Alle bevegelsesforsøk av mikrorobotene ble utført i PBS ved 25 °C. Mikroskilpadden inneholder dobbel konsentrasjon av MNP-er ble kontrollert med en syklusperiode på 0.8 s (utvidet data fig. 8) med sammenlignbare faseseksjoner på 0–0.25 s, 0.25–0.4 s, 0.4–0.7 s og 0.7–0.8 s.
Evaluering av biokompatibilitet
HeLa-celler ble brukt til å vurdere biokompatibiliteten til mikromaskinene, spesielt mikrogriper-arrayene. Kort fortalt ble 7 prøver av fabrikkerte mikrogriper-arrayer plassert i cellekulturbrønnene på 6-brønns plater og fylt med 3 ml kulturmedium. Kontrollgruppebrønnene ble fylt med kun cellemedier. Hver brønn ble sådd med omtrent 105 HeLa-celler. Etter 48 timers inkubering ble 1 brønn fra mikrogripergruppen og 1 fra kontrollgruppen farget direkte ved å bruke det levende/døde fargesettet som inneholdt fluoresceindiacetat (5 mg ml-1 i aceton) og propidiumjodid (1 mg ml-1 i PBS). Flerkanals fluorescensbilder ble tatt ved bruk av fluorescensmikroskopi (Cell Observer, Carl Zeiss Microscopy) under eksitasjon ved en bølgelengde på 470 nm for levende celler (emisjonsbølgelengde 530 nm) og 540 nm for døde celler (emisjonsbølgelengde 618 nm). Etter 72 timers inkubering ble de resterende 12 cellebrønnene trypsinisert, farget og talt under fluorescensmikroskopet. Cellelevedyktighet ble beregnet som forholdet mellom antall levende celler (grønne) og det totale celletall.
Statistikk og reproduserbarhet
Ingen statistisk metode ble brukt for å forhåndsbestemme prøvestørrelsen. Ingen data ble ekskludert fra analysene. Celler og fremstilte prøver ble tilfeldig tildelt de respektive gruppene før operasjon. Undersøkerne ble ikke blindet for tildeling under eksperimenter og resultatvurdering.
Rapporteringssammendrag
Mer informasjon om forskningsdesign er tilgjengelig i Sammendrag av naturporteføljerapportering knyttet til denne artikkelen.
- SEO-drevet innhold og PR-distribusjon. Bli forsterket i dag.
- PlatoData.Network Vertical Generative Ai. Styrk deg selv. Tilgang her.
- PlatoAiStream. Web3 Intelligence. Kunnskap forsterket. Tilgang her.
- PlatoESG. Karbon, CleanTech, Energi, Miljø, Solenergi, Avfallshåndtering. Tilgang her.
- PlatoHelse. Bioteknologisk og klinisk etterretning. Tilgang her.
- kilde: https://www.nature.com/articles/s41565-023-01567-0
- :er
- :ikke
- $OPP
- 1
- 10
- 100
- 12
- 15%
- 16
- 20
- 200
- 2010
- 2019
- 2020
- 22
- 23
- 24
- 25
- 28
- 30
- 35%
- 3d
- 40
- 49
- 51
- 52
- 53
- 54
- 600
- 7
- 70
- 72
- 8
- 80
- 9
- 98
- a
- Om oss
- ovenfor
- Ifølge
- nøyaktighet
- Oppnå
- ervervet
- Handling
- la til
- Ytterligere
- justert
- uheldig
- Etter
- en gang til
- AL
- justere
- justert
- justering
- Alle
- allokering
- langs
- alltid
- am
- an
- analyser
- analyse
- analysert
- Anchor
- og
- En annen
- noen
- anvendt
- påføring
- ca
- ER
- AREA
- rundt
- Array
- Artikkel
- AS
- vurdere
- evaluering
- tildelt
- At
- feste
- tilgjengelig
- unngå
- unngås
- AKSER
- Axis
- Balansert
- Bar
- basert
- BE
- ble
- før du
- mellom
- blåse
- organer
- Break
- kort
- by
- beregnet
- CAN
- kan ikke
- fangst
- fanget
- Carl
- saken
- celle
- Celler
- viss
- Chamber
- endring
- endret
- endring
- karakterisert
- kjemikalier
- Classic
- klikk
- lukking
- Cluster
- kode
- kommersiell
- sammenlign
- komplekse
- komponent
- komponenter
- konsentrasjon
- inneholder
- kontinuerlig
- kontrast
- kontroll
- kontrolleres
- kontrollerende
- koordinere
- koordinert
- Korrigert
- kunne
- KOVALENT
- kritisk
- Kultur
- skjøger
- syklus
- dato
- død
- definere
- Grad
- Etterspørsel
- tetthet
- utforming
- utforme
- Til tross for
- detaljer
- Gjenkjenning
- bestemmes
- utviklet
- Utvikling
- enhet
- forskjellig
- dimensjoner
- direkte
- retning
- retninger
- direkte
- Ulempe
- fordelt
- forskyvning
- gjort
- dobbelt
- kjøring
- droppet
- tørketrommel
- varighet
- under
- e
- E&T
- hver enkelt
- lett
- ed
- effektiv
- effektivt
- element
- utslipp
- muliggjør
- forbedre
- Miljø
- enzymatisk
- Eter (ETH)
- eksempel
- Unntatt
- ekskludert
- eksperiment
- eksperimentell
- eksperimenter
- Eksponering
- utvidet
- utvendig
- Fe
- felt
- Felt
- Fiken
- Figur
- fylt
- slutt~~POS=TRUNC
- Endelig
- Først
- fitting
- væske
- FLUX
- etter
- Til
- Tving
- Krefter
- dannet
- funnet
- fra
- fullt
- funksjon
- funksjoner
- videre
- Dess
- inntjening
- generere
- generert
- genererer
- geometri
- gitt
- Giving
- glass
- gradvis
- Grønn
- Gruppe
- Gruppens
- veilede
- guidet
- HAD
- Halvparten
- hjelpe
- holder
- HTTPS
- IEEE
- bilder
- Påvirkning
- iverksette
- implementert
- in
- INKUBASJON
- indikert
- Indikator
- påvirke
- informasjon
- innledende
- innsiden
- integrert
- forstyrrelser
- inn
- etterforskerne
- DET ER
- holdt
- kit
- laser
- lag
- venstre
- Lengde
- Life
- lett
- linjer
- LINK
- knyttet
- leve
- laste
- laster
- lokal
- Lav
- Magnetfelt
- gjøre
- manipulere
- Manipulasjon
- måte
- merket
- materiale
- materialer
- måle
- målte
- måling
- målinger
- mekanisk
- mekanikk
- Media
- medium
- metall
- metode
- micro
- Mikroskop
- mikros~~POS=TRUNC
- minutter
- blandet
- Blanding
- blanding
- ML
- modell
- modellering
- modifisert
- moduler
- mer
- mer effektivt
- mest
- bevegelse
- flytte
- flytting
- MT
- flere
- nanoteknologi
- Natur
- nødvendig
- nett
- Nei.
- spesielt
- Antall
- observerte
- få
- innhentet
- of
- on
- Ombord
- gang
- bare
- åpen
- åpning
- operert
- drift
- Drift
- or
- Origin
- original
- Annen
- ellers
- ut
- Utfallet
- par
- Parallel
- parametere
- deler
- PBS
- utført
- perioden
- fase
- Tonehøyde
- plasseres
- fly
- Planes
- plato
- Platon Data Intelligence
- PlatonData
- Point
- portefølje
- posisjon
- stillinger
- positiv
- mulig
- makt
- krefter
- forutsi
- forberedt
- tilstedeværelse
- presentert
- tidligere
- prosess
- profesjonell
- Projeksjon
- egenskaper
- eiendom
- fremdrift
- kjøpt
- Quantum
- Sats
- ratio
- innspilling
- Gjen
- utvinning
- Rød
- referanse
- ansett
- slipp
- gjenværende
- eksternt
- fjerne
- gjentatt
- erstattet
- rapportert
- Rapportering
- representere
- forskning
- respekt
- de
- Resultater
- ikke sant
- rigid
- robot
- Rull
- rullende
- rom
- s
- samme
- SCI
- Sekund
- seksjoner
- se
- se detaljer
- Søke
- segmentet
- sensorer
- Sequence
- Serum
- sett
- Form
- figurer
- Kort
- bør
- vist
- Viser
- forenklet
- forenkle
- ganske enkelt
- simulering
- samtidig
- Størrelse
- Sakte
- liten
- So
- natrium
- Soft
- Software
- løsning
- løst
- spesiell
- spesifikk
- spesielt
- spesifisert
- Spectrum
- fart
- sperm
- statistisk
- Strategi
- strukturell
- struktur
- I ettertid
- mottakelighet
- svømming
- system
- tatt
- Target
- terminal
- tekst
- Det
- De
- deretter
- Disse
- Theta
- denne
- tre
- tick
- tid
- ganger
- til
- Totalt
- mot
- bane
- trans
- transportere
- fangst
- behandlet
- To ganger
- to
- Ultralyd
- etter
- Universell
- bruke
- brukt
- ved hjelp av
- validert
- levedyktighet
- videoer
- volum
- var
- vasking
- Vann
- Vei..
- we
- VI VIL
- Wells
- var
- når
- hvilken
- mens
- hele
- med
- uten
- skriving
- zephyrnet
- null