작성자 별 이미지
XGBoost, CatBoost 또는 LightGBM(심지어 오토 인코더!) 중요한 공통 성분에 의존: 의사 결정 트리!
의사 결정 트리를 이해하지 않고는 앞서 언급한 고급 배깅 또는 그래디언트 부스팅 알고리즘을 이해하는 것이 불가능합니다. 이는 모든 데이터 과학자에게 치욕입니다! 따라서 Python으로 구현하여 결정 트리의 내부 작동 방식을 이해해 보겠습니다.
이 기사에서는
- 의사 결정 트리가 데이터를 분할하는 이유와 방법,
- 정보 획득,
- NumPy를 사용하여 Python에서 결정 트리를 구현하는 방법.
에서 코드를 찾을 수 있습니다. 내 Github.
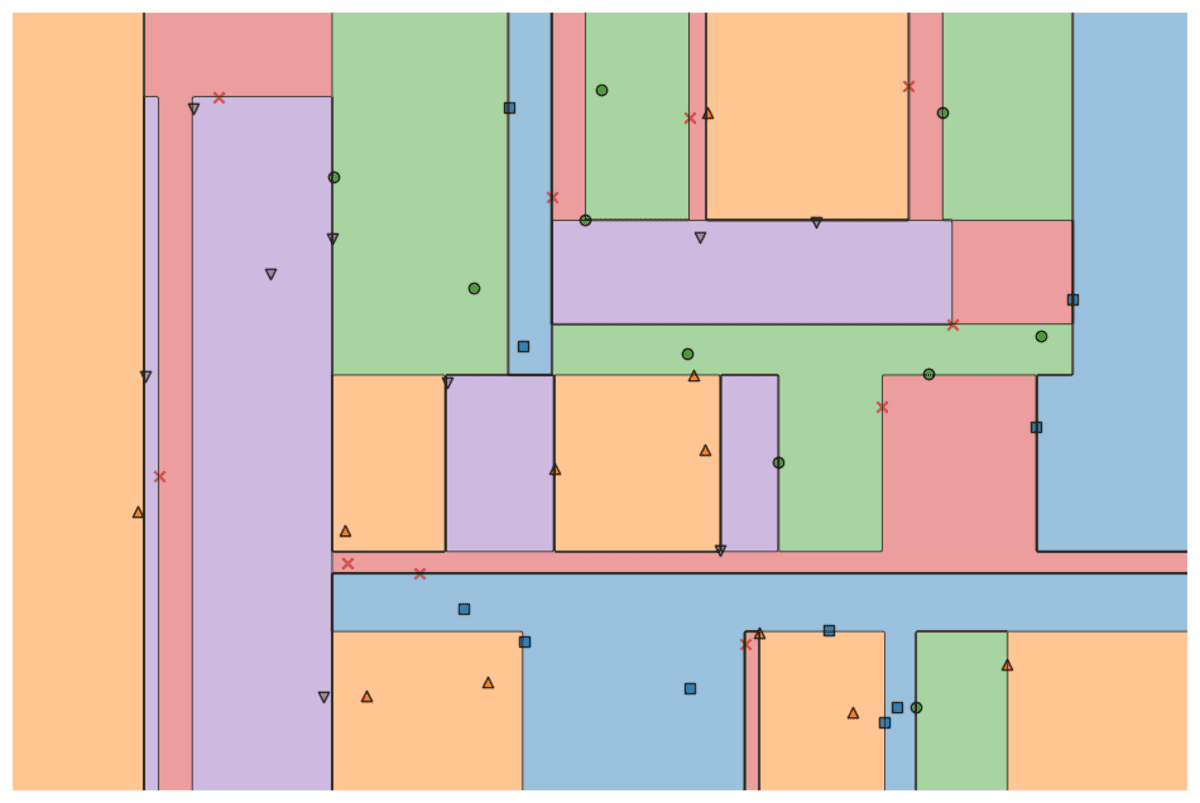
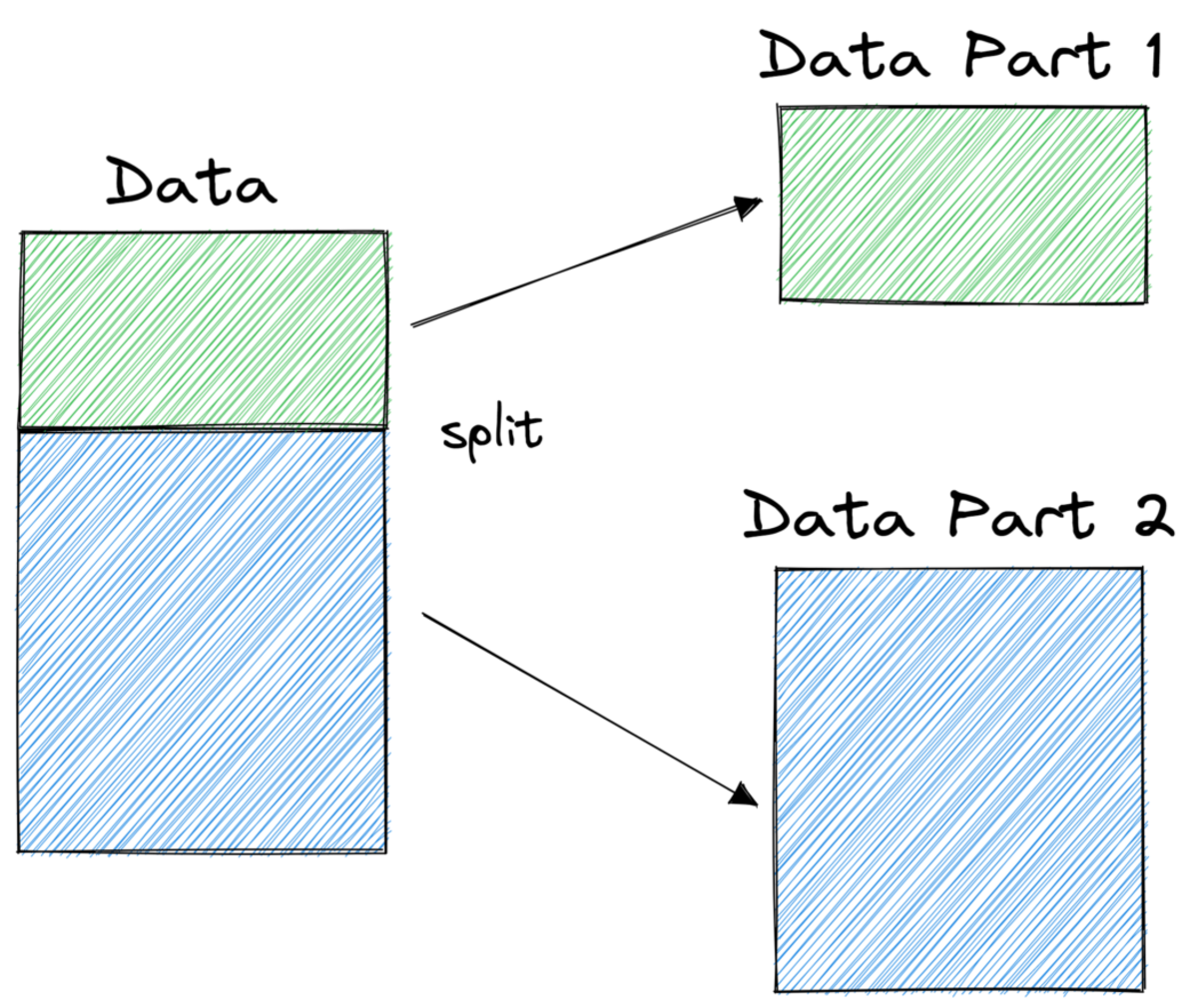
예측을 하기 위해 결정 트리는 다음에 의존합니다. 파편 재귀 방식으로 데이터 세트를 더 작은 부분으로 나눕니다.
작성자 별 이미지
위의 그림에서 분할의 한 예를 볼 수 있습니다. 원본 데이터 세트가 두 부분으로 분리됩니다. 다음 단계에서 이 두 부분이 다시 분할됩니다. 이것은 어떤 종류의 중지 기준이 충족될 때까지 계속됩니다. 예를 들어,
- 분할 결과 일부가 비어 있는 경우
- 특정 재귀 깊이에 도달한 경우
- (이전 분할 후) 데이터 세트가 몇 개의 요소로만 구성되어 있으면 추가 분할이 필요하지 않습니다.
이러한 분할을 어떻게 찾을 수 있습니까? 그리고 우리는 왜 신경을 쓰나요? 알아 보자.
자극
해결하고 싶다고 가정해 봅시다. 진 분류 문제 우리가 지금 우리 자신을 창조하는 것:
import numpy as np
np.random.seed(0) X = np.random.randn(100, 2) # features
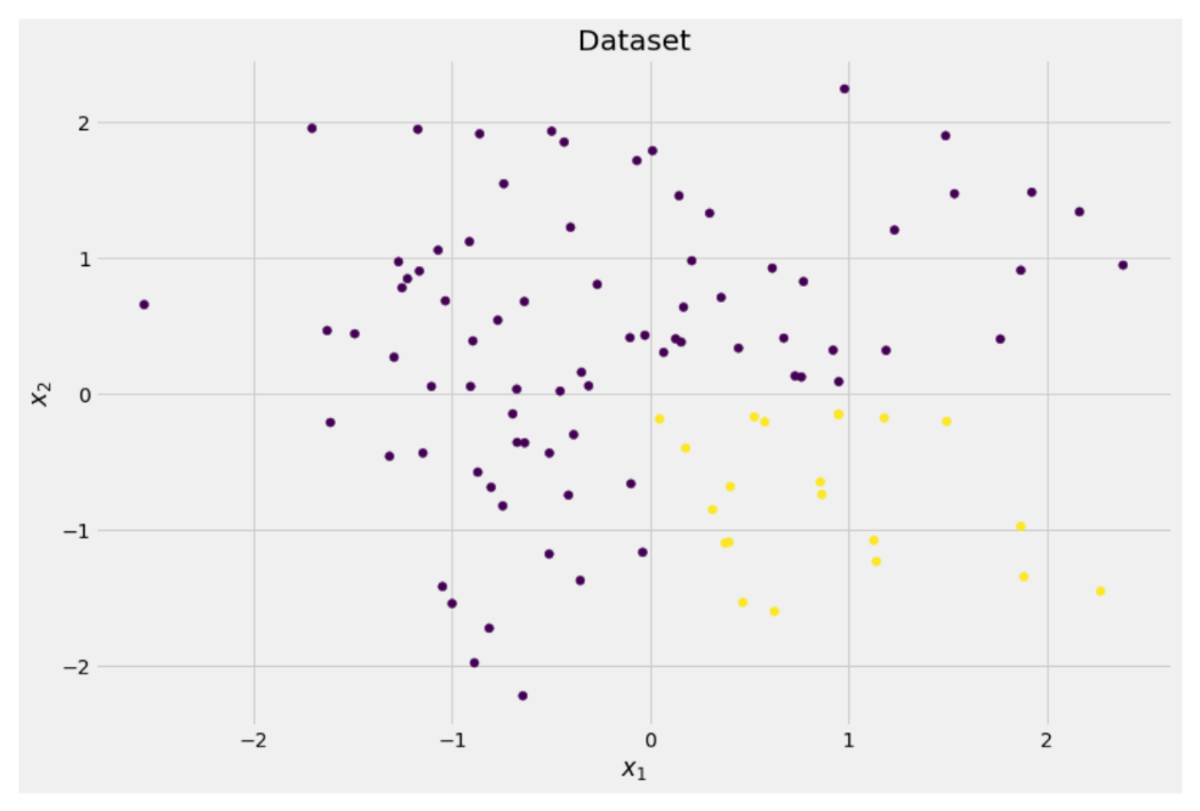
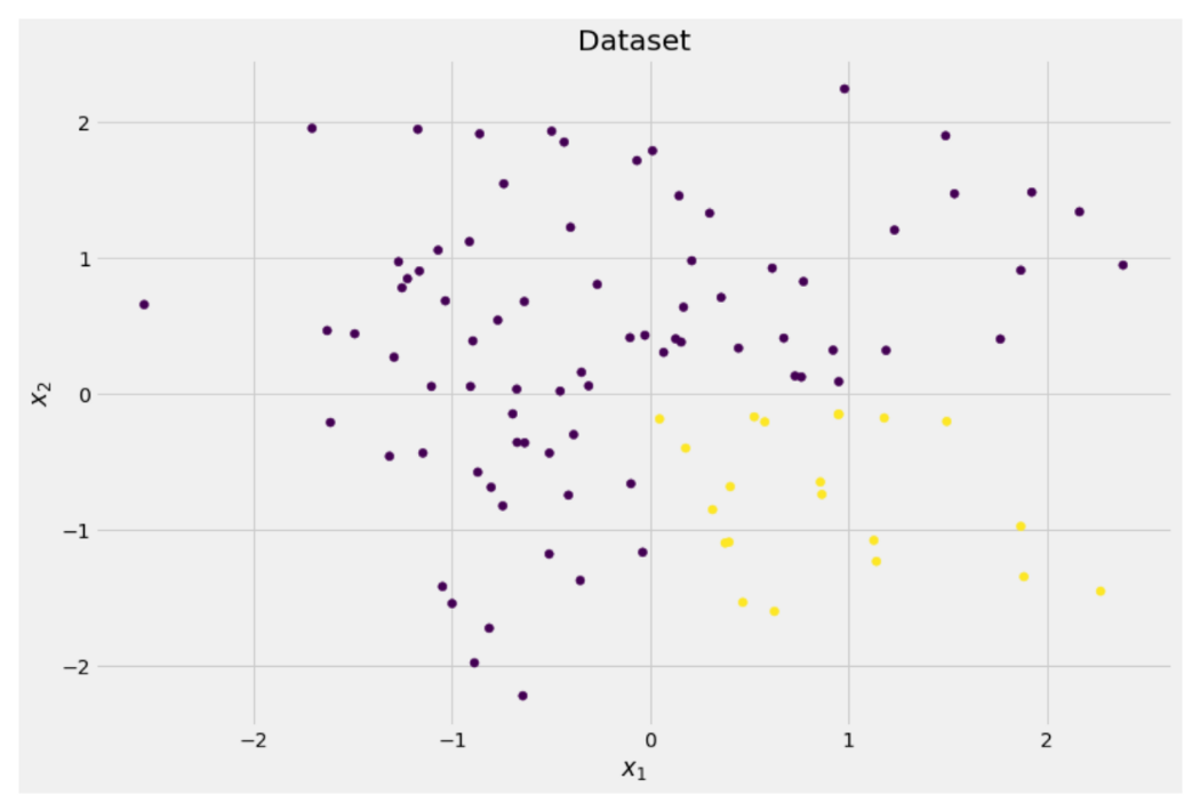
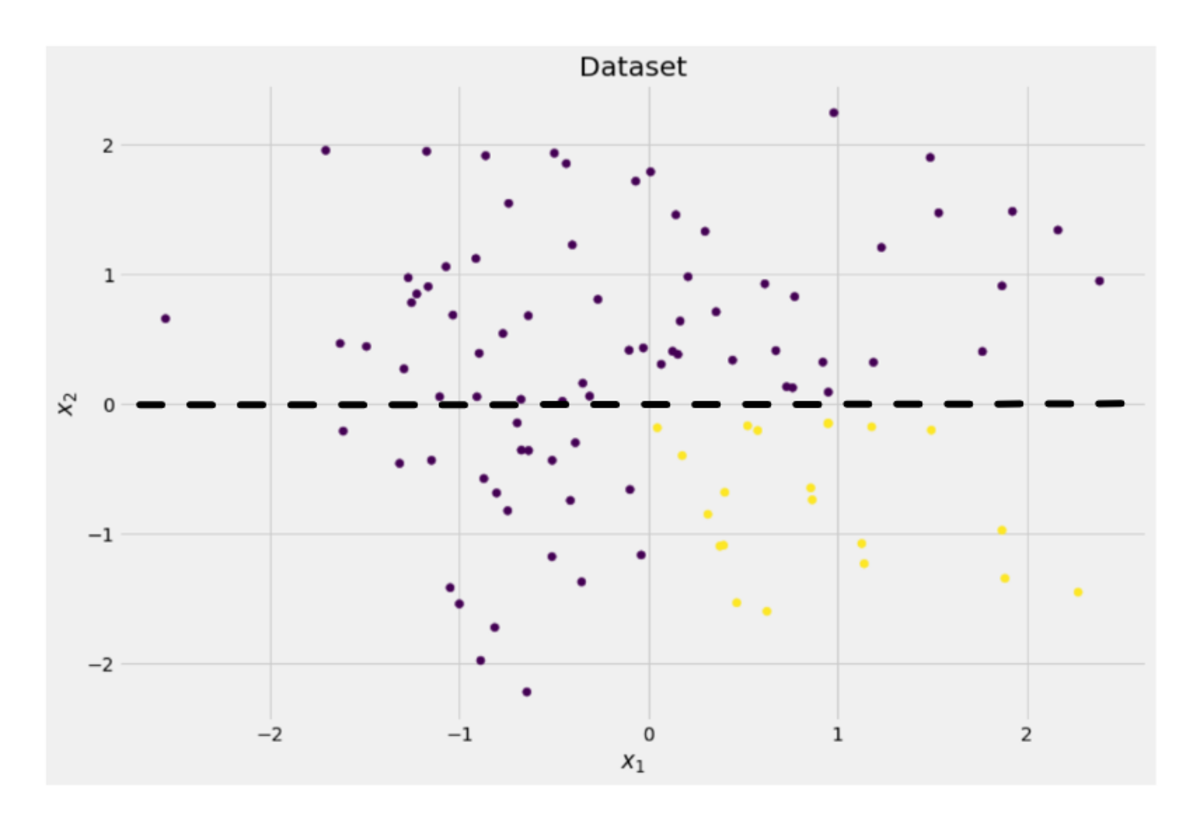
y = ((X[:, 0] > 0) * (X[:, 1] < 0)) # labels (0 and 1)XNUMX차원 데이터는 다음과 같습니다.
작성자 별 이미지
약 75%의 보라색과 약 25%의 경우 노란색의 두 가지 다른 클래스가 있음을 알 수 있습니다. 이 데이터를 의사 결정 트리에 공급하면 분류기, 이 트리는 처음에 다음과 같은 생각을 가지고 있습니다.
“두 개의 서로 다른 레이블이 있는데, 저에게는 너무 지저분합니다. 데이터를 두 부분으로 분할하여 이 난장판을 정리하고 싶습니다. 이 부분은 이전의 완전한 데이터보다 깨끗해야 합니다.” — 의식을 얻은 나무
그래서 나무가 합니다.
작성자 별 이미지
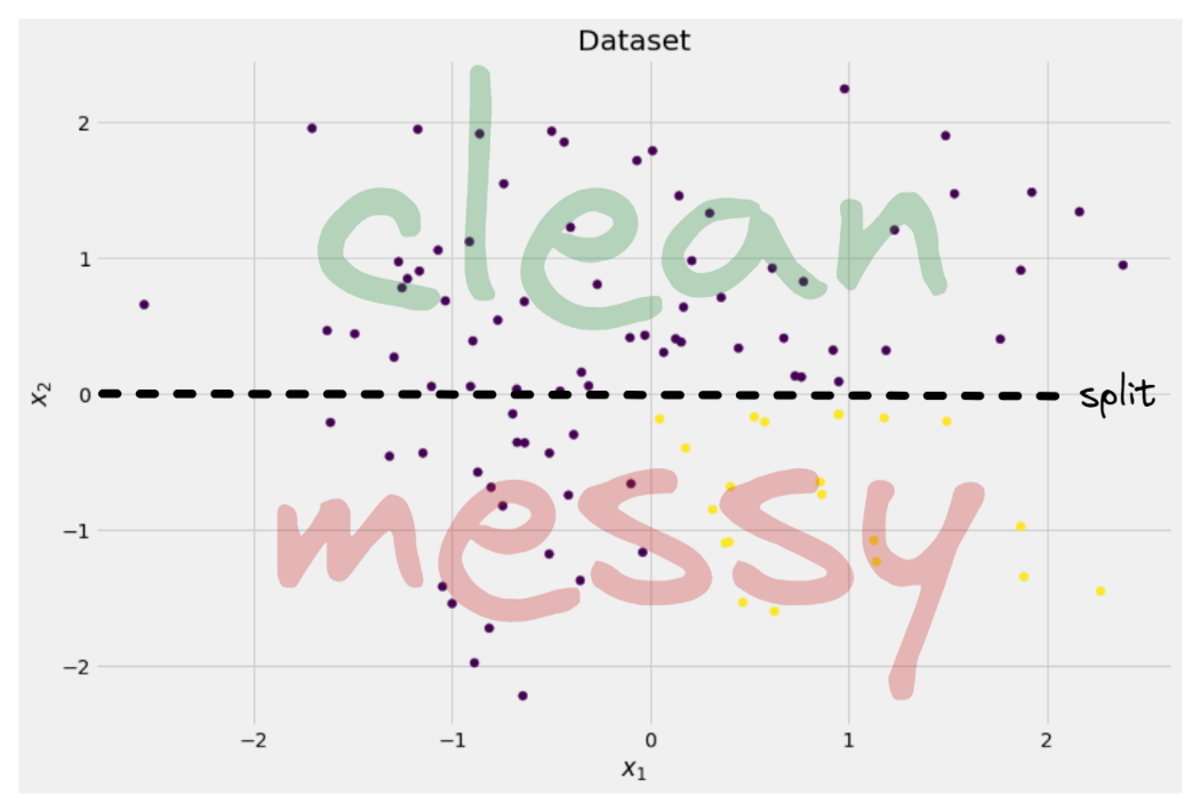
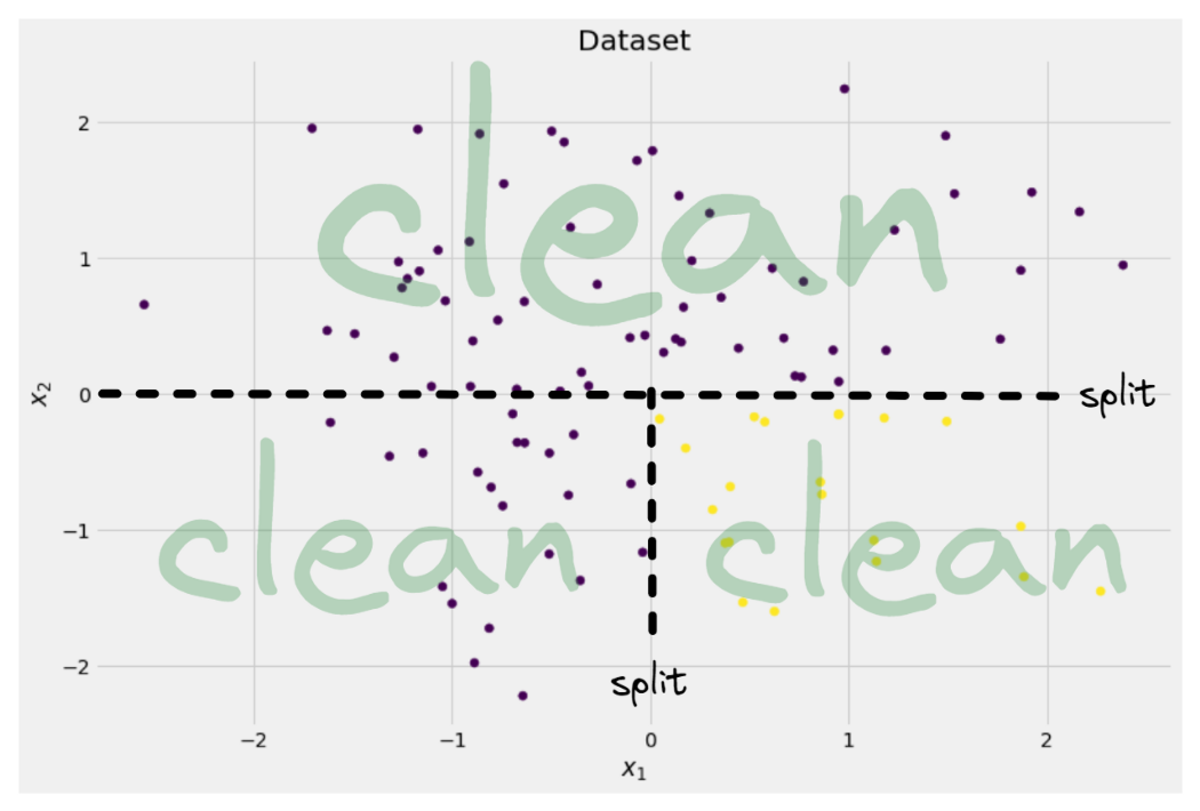
트리는 대략 다음을 따라 분할하기로 결정합니다. x-중심선. 이것은 데이터의 상단 부분이 이제 완벽하게 깨끗한, 당신이 단지 찾을 의미 단일 클래스 (이 경우 보라색) 있습니다.
그래도 바닥 부분은 지저분한, 어떤 의미에서 이전보다 훨씬 더 지저분합니다. 클래스 비율은 전체 데이터 세트에서 약 75:25였지만 이 더 작은 부분에서는 약 50:50이며, 이는 가능한 한 혼합되어 있습니다.
참고 : 여기서 그림에서 보라색과 노란색이 잘 구분되어 있는 것은 중요하지 않습니다. 그냥 그 다른 레이블의 원시 양 두 부품 수에서.
작성자 별 이미지
그래도 이것은 트리의 첫 번째 단계로 충분하므로 계속 진행됩니다. 상단에 또 다른 분할이 생성되지는 않지만 황어 무리 더 이상 하단 부분에 또 다른 분할을 생성하여 정리할 수 있습니다.
작성자 별 이미지
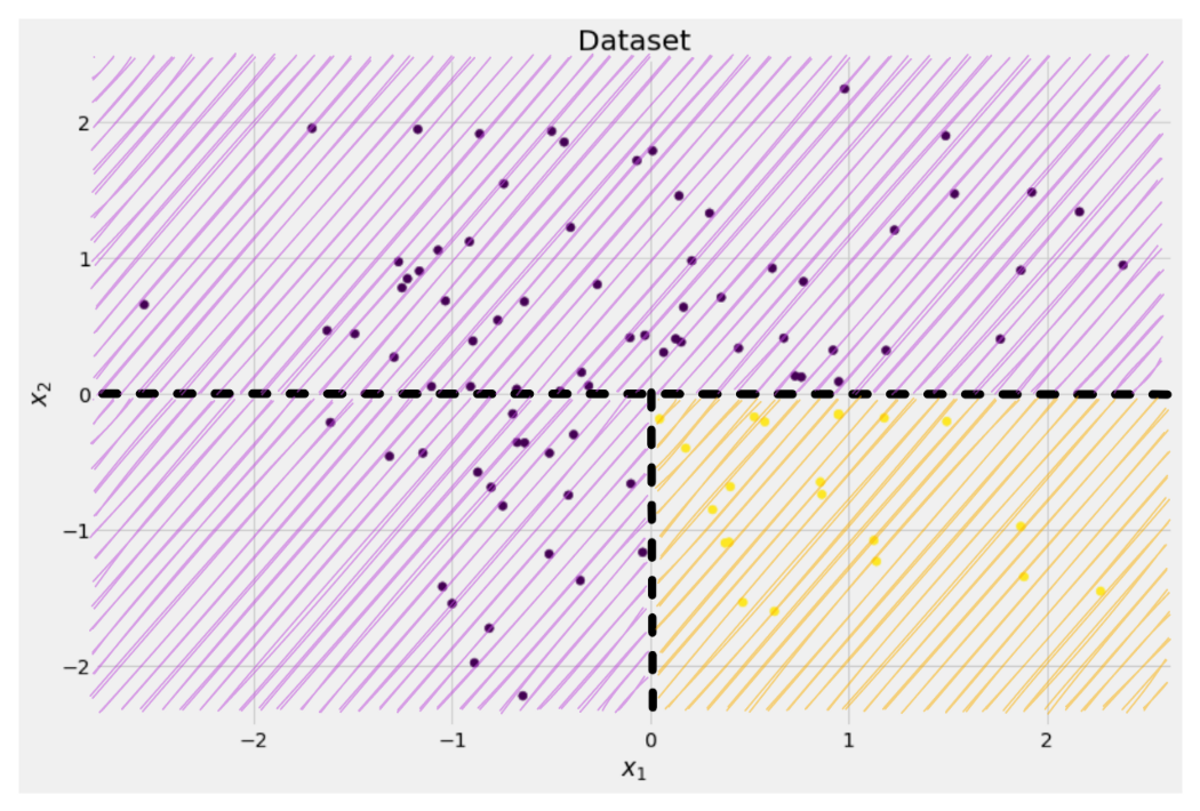
그리고 짜잔, 부품당 단일 색상(라벨)만 찾을 수 있으므로 세 개의 분리된 부품은 각각 완전히 깨끗합니다.
이제 정말 쉽게 예측할 수 있습니다. 새로운 데이터 포인트가 들어오면 세 부분 거짓말하고 해당 색상을 제공합니다. 이것은 각 부분이 황어 무리. 쉽죠?
작성자 별 이미지
좋아, 우리는 그것에 대해 이야기하고 있었다 황어 무리 및 지저분한 데이터이지만 지금까지 이러한 단어는 모호한 아이디어만을 나타냅니다. 무엇이든 구현하려면 다음을 정의하는 방법을 찾아야 합니다. 청결.
청결을 위한 조치
예를 들어 레이블이 있다고 가정해 보겠습니다.
y_1 = [0, 0, 0, 0, 0, 0, 0, 0] y_2 = [1, 0, 0, 0, 0, 0, 1, 0]
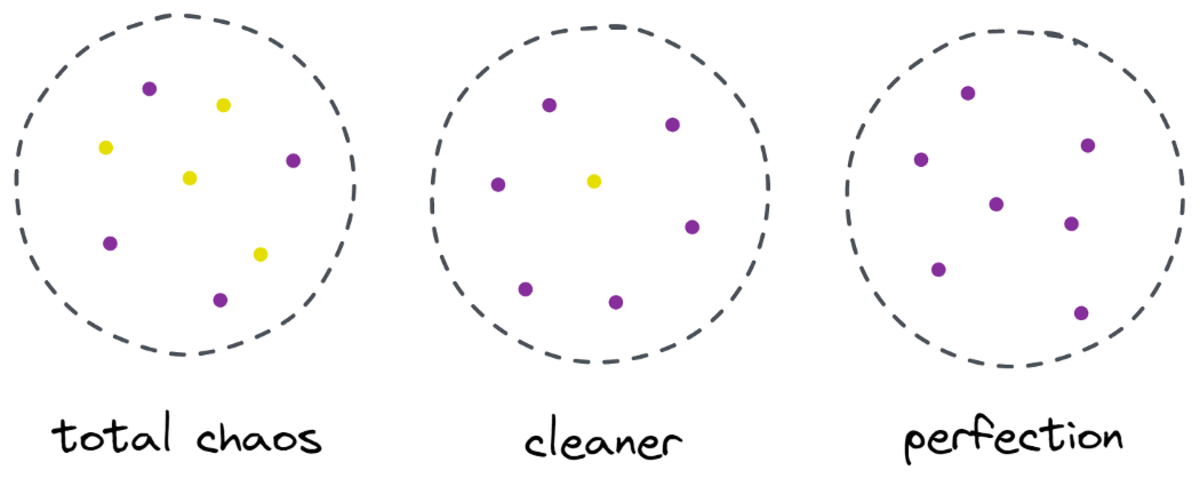
y_3 = [1, 0, 1, 1, 0, 0, 1, 0]직관적으로 y₁ 가장 깨끗한 라벨 세트이며, y² 그리고 y₃. 지금까지는 좋았지만 이 행동에 어떻게 숫자를 매길 수 있을까요? 가장 쉽게 떠오르는 것은 다음과 같습니다.
XNUMX의 수와 XNUMX의 수를 세어보세요. 절대 차이를 계산합니다. 더 좋게 만들려면 배열의 길이로 나누어 정규화하십시오.
예를 들어, y² 8개의 6과 2개의 XNUMX로 총 XNUMX개의 항목이 있습니다. 따라서 우리의 맞춤형 정의 청결 점수 |6 – 2| /8 = 0.5. 청결도 점수를 쉽게 계산할 수 있습니다. y₁ 및 y₃ 각각 1.0과 0.0입니다. 여기에서 일반 공식을 볼 수 있습니다.

작성자 별 이미지
여기 ㄴ₀ 및 ₁ 는 각각 XNUMX과 XNUMX의 수입니다. n = n₀ + n₁ 배열의 길이이고 p₁ = n₁ / n 1 레이블의 점유율입니다.
이 공식의 문제는 특히 두 클래스의 경우에 맞게, 그러나 매우 자주 우리는 다중 클래스 분류에 관심이 있습니다. 꽤 잘 작동하는 한 가지 공식은 지니 불순물 측정:

작성자 별 이미지
또는 일반적인 경우:

작성자 별 이미지
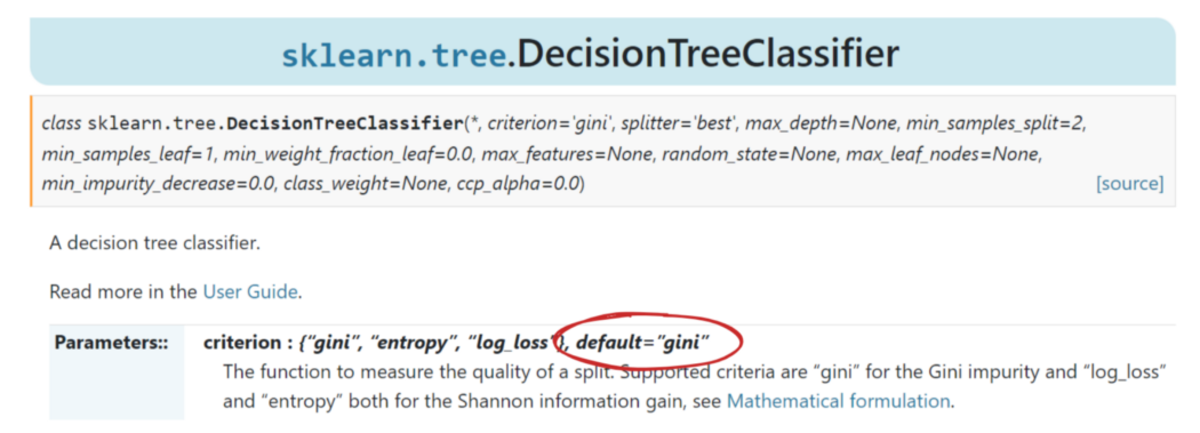
그것은 scikit-learn이 잘 작동합니다. 기본 조치로 채택 의에 대한 DecisionTreeClassifier 클래스입니다.
작성자 별 이미지
참고 : 지니 측정 지저분함 청결 대신. 예: 목록이 단일 클래스(=매우 깨끗한 데이터!)만 포함하는 경우 합계의 모든 용어는 1이므로 합계는 1입니다. 최악의 경우는 모든 클래스가 정확한 횟수로 나타나는 경우이며, 이 경우 Gini는 XNUMX–XNUMX/C 어디에 C 클래스의 수입니다.
이제 우리는 깨끗함/어지러움에 대한 척도를 가지고 있으므로 좋은 분할을 찾는 데 어떻게 사용할 수 있는지 살펴보겠습니다.
분할 찾기
우리가 선택하는 많은 분할이 있지만 어느 것이 좋은 분할입니까? Gini 불순도 측정과 함께 초기 데이터 세트를 다시 사용하겠습니다.
작성자 별 이미지
지금은 점수를 계산하지 않겠지만 75%가 보라색이고 25%가 노란색이라고 가정해 보겠습니다. Gini의 정의를 사용하면 전체 데이터 세트의 불순물은 다음과 같습니다.

작성자 별 이미지
데이터 세트를 다음과 같이 분할하면 x-축, 이전과 같이:
작성자 별 이미지
XNUMXD덴탈의 상단 부분의 지니 불순물은 0.0입니다. 그리고 밑부분

작성자 별 이미지
평균적으로 두 부분의 지니 불순도는 (0.0 + 0.5) / 2 = 0.25로 전체 데이터 세트의 이전 0.375보다 좋습니다. 우리는 또한 그것을 소위 용어로 표현할 수 있습니다. 정보 획득:
이 분할의 정보 이득은 0.375 – 0.25 = 0.125입니다.
그렇게 쉽습니다. 정보 획득이 높을수록(즉, 지니 불순도가 낮을수록) 더 좋습니다.
참고 : 똑같이 좋은 또 다른 초기 분할은 y축을 따라 있을 것입니다.
명심해야 할 중요한 점은 부품의 크기로 부품의 지니 불순물을 칭량. 예를 들어,
- 파트 1은 50개의 데이터 포인트로 구성되며 지니 불순도는 0.0이고
- 파트 2는 450개의 데이터 포인트로 구성되며 지니 불순도는 0.5입니다.
그러면 평균 지니 불순도는 (0.0 + 0.5) / 2 = 0.25가 아니라 50 / (50 + 450) * 0.0 + 450 / (50 + 450) * 0.5 = 0.45.
좋아요, 어떻게 최고의 분할을 찾을 수 있을까요? 간단하지만 진지한 대답은 다음과 같습니다.
모든 분할을 시도하고 정보 획득이 가장 높은 분할을 선택하십시오. 기본적으로 무차별 대입 방식입니다.
더 정확히 말하면 표준 결정 트리는 다음을 사용합니다. 좌표축을 따라 분할, ie xᵢ = c 일부 기능에 대해 i 및 임계값 c. 즉
- 분할 데이터의 한 부분은 모든 데이터 포인트로 구성됩니다. x 과 xᵢc및
- 모든 포인트의 다른 부분 x 과 xᵢ ≥ c.
이러한 간단한 분할 규칙은 실제로 충분히 좋은 것으로 입증되었지만 물론 이 논리를 확장하여 다른 분할(예: 다음과 같은 대각선)을 생성할 수도 있습니다. xᵢ + 2xⱼ = 3예를 들어,).
좋아, 이것들은 우리가 지금 시작하는 데 필요한 모든 재료입니다!
이제 결정 트리를 구현할 것입니다. 노드로 구성되어 있으므로 Node 먼저 수업.
from dataclasses import dataclass @dataclass
class Node: feature: int = None # feature for the split value: float = None # split threshold OR final prediction left: np.array = None # store one part of the data right: np.array = None # store the other part of the data노드는 분할에 사용하는 기능을 알고 있습니다(feature) 및 분할 값(value). value 의사 결정 트리의 최종 예측을 위한 저장소로도 사용됩니다. 이진 트리를 만들 것이므로 각 노드는 왼쪽 및 오른쪽 자식을 알아야 합니다. left 및 right .
이제 실제 의사 결정 트리 구현을 수행해 보겠습니다. 나는 그것을 scikit-learn과 호환되도록 만들고 있으므로 다음의 일부 클래스를 사용합니다. sklearn.base . 그것에 익숙하지 않다면 내 기사를 확인하십시오. scikit-learn 호환 모델을 구축하는 방법.
구현하자!
import numpy as np
from sklearn.base import BaseEstimator, ClassifierMixin class DecisionTreeClassifier(BaseEstimator, ClassifierMixin): def __init__(self): self.root = Node() @staticmethod def _gini(y): """Gini impurity.""" counts = np.bincount(y) p = counts / counts.sum() return (p * (1 - p)).sum() def _split(self, X, y): """Bruteforce search over all features and splitting points.""" best_information_gain = float("-inf") best_feature = None best_split = None for feature in range(X.shape[1]): split_candidates = np.unique(X[:, feature]) for split in split_candidates: left_mask = X[:, feature] split X_left, y_left = X[left_mask], y[left_mask] X_right, y_right = X[~left_mask], y[~left_mask] information_gain = self._gini(y) - ( len(X_left) / len(X) * self._gini(y_left) + len(X_right) / len(X) * self._gini(y_right) ) if information_gain > best_information_gain: best_information_gain = information_gain best_feature = feature best_split = split return best_feature, best_split def _build_tree(self, X, y): """The heavy lifting.""" feature, split = self._split(X, y) left_mask = X[:, feature] split X_left, y_left = X[left_mask], y[left_mask] X_right, y_right = X[~left_mask], y[~left_mask] if len(X_left) == 0 or len(X_right) == 0: return Node(value=np.argmax(np.bincount(y))) else: return Node( feature, split, self._build_tree(X_left, y_left), self._build_tree(X_right, y_right), ) def _find_path(self, x, node): """Given a data point x, walk from the root to the corresponding leaf node. Output its value.""" if node.feature == None: return node.value else: if x[node.feature] node.value: return self._find_path(x, node.left) else: return self._find_path(x, node.right) def fit(self, X, y): self.root = self._build_tree(X, y) return self def predict(self, X): return np.array([self._find_path(x, self.root) for x in X])그리고 그게 다야! 이제 scikit-learn에 대해 좋아하는 모든 것을 할 수 있습니다.
dt = DecisionTreeClassifier().fit(X, y)
print(dt.score(X, y)) # accuracy # Output
# 1.0트리가 정규화되지 않았기 때문에 과대적합이 많으므로 완벽한 열차 점수입니다. 보이지 않는 데이터에서는 정확도가 더 나빠집니다. 우리는 또한 다음을 통해 나무가 어떻게 보이는지 확인할 수 있습니다.
print(dt.root) # Output (prettified manually):
# Node(
# feature=1,
# value=-0.14963454032767076,
# left=Node(
# feature=0,
# value=0.04575851730144607,
# left=Node(
# feature=None,
# value=0,
# left=None,
# right=None
# ),
# right=Node(
# feature=None,
# value=1,
# left=None,
# right=None
# )
# ),
# right=Node(
# feature=None,
# value=0,
# left=None,
# right=None
# )
# )그림으로 나타내면 다음과 같습니다.
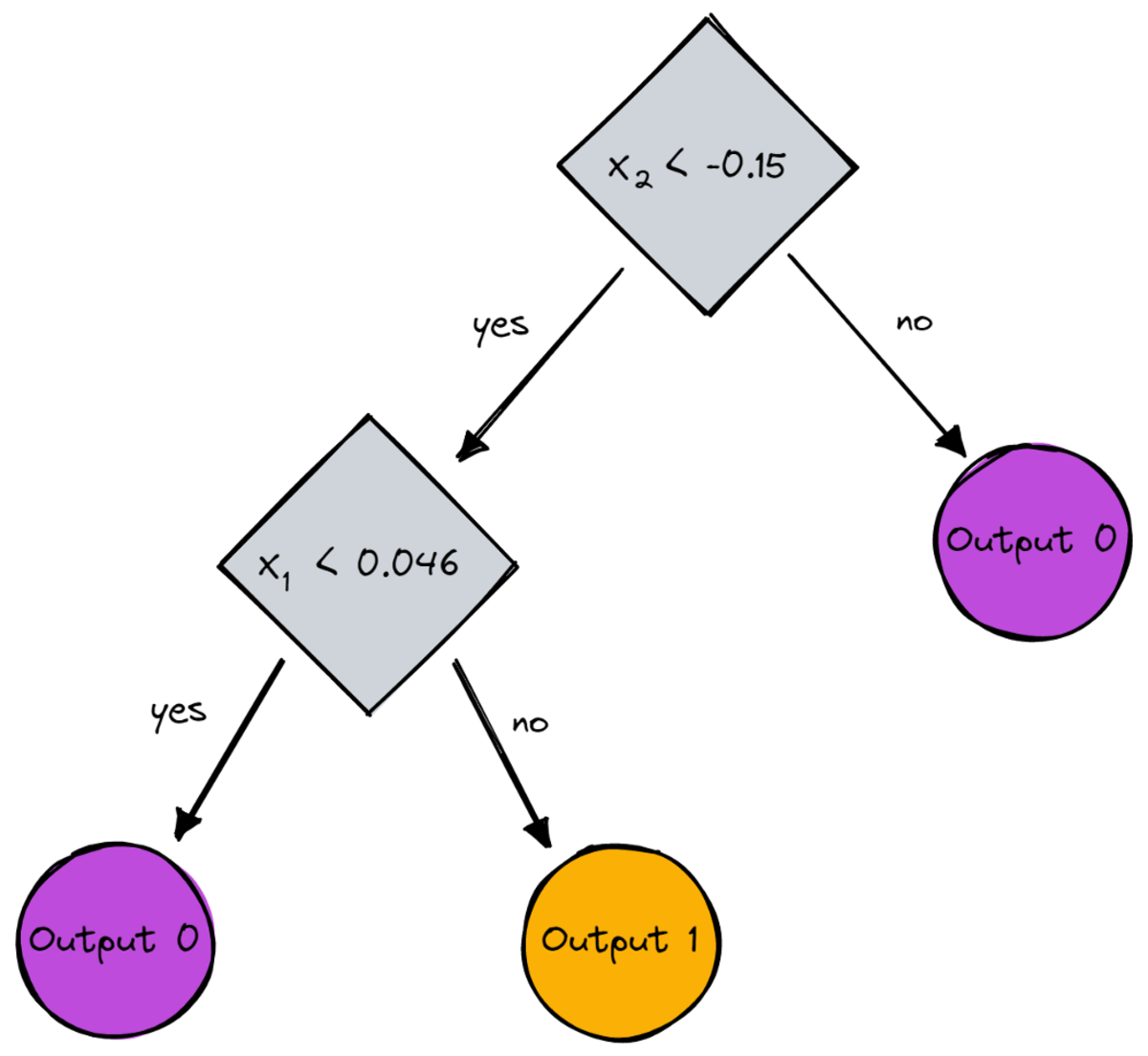
작성자 별 이미지
이 기사에서는 의사 결정 트리가 어떻게 작동하는지 자세히 살펴보았습니다. 우리는 모호하지만 직관적인 아이디어로 시작하여 공식과 알고리즘으로 전환했습니다. 결국 처음부터 의사 결정 트리를 구현할 수 있었습니다.
그러나 주의 사항: 우리의 결정 트리는 아직 정규화할 수 없습니다. 일반적으로 다음과 같은 매개변수를 지정하고 싶습니다.
- 최대 깊이
- 잎 크기
- 최소한의 정보 획득
다른 많은 것들 중에서. 운 좋게도 이러한 것들은 구현하기가 그리 어렵지 않기 때문에 이것은 당신에게 완벽한 숙제입니다. 예를 들어 다음을 지정하는 경우 leaf_size=10 매개변수로 10개 이상의 샘플을 포함하는 노드는 더 이상 분할되지 않아야 합니다. 또한, 이 구현은 비효율적. 일반적으로 데이터 세트의 일부를 노드에 저장하지 않고 대신 인덱스만 저장하려고 합니다. 따라서 (잠재적으로 큰) 데이터 세트는 메모리에 한 번만 있습니다.
좋은 점은 이 의사 결정 트리 템플릿을 사용하여 지금 열광할 수 있다는 것입니다. 다음을 수행할 수 있습니다.
- 대각선 분할 구현, 즉 xᵢ + 2xⱼ = 3 그냥 대신 xᵢ = 3,
- 리프 내부에서 발생하는 논리를 변경합니다. 즉, 다수결을 수행하는 대신 각 리프 내에서 로지스틱 회귀를 실행할 수 있습니다. 선형 트리
- 분할 절차를 변경하십시오. 추가 트리 분류기
- 등을 포함합니다.
로버트 퀴블러 박사 Publicis Media의 데이터 과학자이자 Towards Data Science의 저자입니다.
실물. 허가를 받아 다시 게시했습니다.
- SEO 기반 콘텐츠 및 PR 배포. 오늘 증폭하십시오.
- 플라토 블록체인. Web3 메타버스 인텔리전스. 지식 증폭. 여기에서 액세스하십시오.
- 출처: https://www.kdnuggets.com/2023/02/understanding-implementing-decision-tree.html?utm_source=rss&utm_medium=rss&utm_campaign=understanding-by-implementing-decision-tree
- 1
- 10
- 100
- 11
- 28
- 7
- 9
- a
- 할 수 있는
- 소개
- 위의
- 절대
- 많은
- 후
- 알고리즘
- All
- 양
- 및
- 다른
- 답변
- 표시
- 접근
- 대략
- 약
- 배열
- 기사
- 저자
- 평균
- 기지
- 원래
- 때문에
- 전에
- 존재
- BEST
- 더 나은
- 증폭
- 바닥
- 브 루트 포스
- 빌드
- 한
- 케이스
- 가지 경우
- 어떤
- 검사
- 어린이
- 왼쪽 메뉴에서
- 수업
- 수업
- 분류
- 암호
- 색
- 조합
- 공통의
- 호환
- 완전한
- 완전히
- 계산
- 의식
- 계속
- 좌표의
- 동
- 코스
- 만들
- 결정적인
- 데이터
- 데이터 과학
- 데이터 과학자
- 데이터 세트
- 결정
- 의사 결정 트리
- 태만
- 깊이
- 세부 묘사
- 차이
- 다른
- 어려운
- 하지 않습니다
- 하기
- 마다
- 가장 쉬운
- 효과
- 요소
- 충분히
- 전체의
- 균일하게
- 에테르 (ETH)
- 조차
- 예
- 급행
- 확장
- 익숙한
- 패션
- 특색
- 특징
- 를
- 최후의
- Find
- 먼저,
- 흙손
- 다음에
- 수행원
- 힘
- 공식
- 에
- 추가
- 이득
- 일반
- 얻을
- 지니
- 주기
- 주어진
- 제공
- Go
- 가는
- 좋은
- 발생
- 여기에서 지금 확인해 보세요.
- 더 높은
- 최고
- 숙제
- 방법
- HTML
- HTTPS
- 생각
- 아이디어
- 구현
- 이행
- 구현
- import
- 중대한
- 불가능한
- in
- 색인
- 정보
- 처음에는
- 처음에는
- 를 받아야 하는 미국 여행자
- 관심있는
- 직관적인
- IT
- 너 겟츠
- 유지
- 종류
- 알아
- 라벨
- 레이블
- 넓은
- 배우기
- 길이
- 리프팅
- 라인
- 링크드인
- 명부
- 봐라.
- 롯
- 애정
- 기계
- 기계 학습
- 과반수
- 확인
- 제작
- 유튜브 영상을 만드는 것은
- 수동으로
- .
- 문제
- 방법
- 측정
- 미디어
- 메모리
- 신경
- 최소의
- 혼합 된
- 모델
- 배우기
- 필요
- 요구
- 신제품
- 다음 것
- 노드
- 노드
- 번호
- 숫자
- numpy
- ONE
- 주문
- 실물
- 기타
- 기타
- 매개 변수
- 매개 변수
- 부품
- 부품
- 완전한
- 허가
- 선택
- .
- 플라톤
- 플라톤 데이터 인텔리전스
- 플라토데이터
- 포인트 적립
- 전철기
- 잠재적으로
- 연습
- 예측
- 예측
- 너무 이른
- 문제
- 증명 된
- 놓다
- Python
- 닥치는대로의
- 비율
- 도달
- 재귀
- 되돌아옴
- 대표
- 각기
- 결과
- return
- ROBERT
- 뿌리
- 규칙
- 달리기
- 과학
- 과학자
- 사이 킷 학습
- 검색
- 본인
- 감각
- 별도의
- 세트
- 공유
- 영상을
- 단순, 간단, 편리
- 이후
- 단일
- 크기
- 작은
- So
- 지금까지
- 풀다
- 일부
- 분열
- 스플릿
- 표준
- 시작
- 단계
- 멎는
- 저장
- 저장
- 저장
- 이러한
- 맞춤형
- 말하는
- 이 템플릿
- 조건
- XNUMXD덴탈의
- 정보
- 그들의
- 맡은 일
- 일
- 세
- 임계값
- 을 통하여
- 시대
- 에
- 함께
- 너무
- 상단
- 금액
- 에 대한
- Train
- 나무
- 돌린
- 이해
- 이해
- us
- 사용
- 보통
- 가치
- 투표
- 어느
- 동안
- 의지
- 이내
- 워드
- 말
- 작업
- 작업장
- 일
- 가장 나쁜
- 겠지
- X
- XGBoost
- 너의
- 제퍼 넷
- 제로