「自動運転分野における合成開口レーダー (SAR) 処理のための同時位置特定とマッピング (SLAM)」というタイトルの技術論文がウルム大学の研究者によって発表されました。
要約:
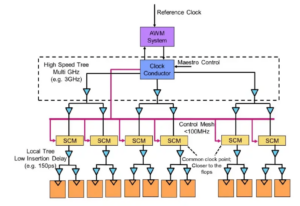
「自動運転技術は近年目覚ましい進歩を遂げ、交通システムに革命をもたらし、より安全で効率的な移動への道を切り開きました。完全自動運転車の開発における重要な課題の 77 つは、周囲の環境を正確に認識することです。レーダー センサー ネットワークは、堅牢な環境検出機能を提供します。合成開口レーダ(SAR)の原理は地球観測の分野だけでなく、自動運転の分野でも応用が進むことが明らかになってきました。車両に搭載されたレーダー センサーの助けを借りて、巨大な合成開口を作成できるため、高い角度分解能が達成され、最終的には詳細な画像を取得できるようになります。ただし、画質が向上すると、位置精度、つまり地図内での車両の位置特定に対する要求も高まります。従来の全地球航法衛星システム (GNSS) では、長い軌道にわたるミリメートル範囲の相対的な位置特定精度を達成できないため、いわゆる同時位置特定およびマッピング (SLAM) アルゴリズムがよく使用されます。この論文では、500 GHz の自動車周波数領域で高解像度の SAR 処理を可能にする、純粋にレーダーベースの SLAM アルゴリズムを紹介します。提示されたアルゴリズムは、長さ XNUMX m まで、測定時間が XNUMX 分を超える軌道の測定によって評価されます。」
見つける テクニカルペーパーはこちら。 2023 年 XNUMX 月に発行。
T. Grebner、R. Riekenbrauck、C. Waldschmidt、「自動運転分野における合成開口レーダー (SAR) 処理のための同時位置特定とマッピング (SLAM)」、IEEE Transactions on Radar Systems、vol. 2、47-66 ページ、2024 年、土井: 10.1109/TRS.2023.3347734。
関連レディング
自動運転に必要なセンサーは何個?
センサー技術は依然として進化しており、その機能については議論が行われています。
レベル 4 車両の準備
自律性は、L3+ のさまざまな段階で導入される可能性があります。何が欠けているのか、どのテクノロジーとビジネスの課題を解決する必要があるのか。
- SEO を活用したコンテンツと PR 配信。 今日増幅されます。
- PlatoData.Network 垂直生成 Ai。 自分自身に力を与えましょう。 こちらからアクセスしてください。
- プラトアイストリーム。 Web3 インテリジェンス。 知識増幅。 こちらからアクセスしてください。
- プラトンESG。 カーボン、 クリーンテック、 エネルギー、 環境、 太陽、 廃棄物管理。 こちらからアクセスしてください。
- プラトンヘルス。 バイオテクノロジーと臨床試験のインテリジェンス。 こちらからアクセスしてください。
- 情報源: https://semiengineering.com/radar-based-slam-algorithm-ulm-university/
- :持っている
- :は
- :not
- $UP
- 10
- 2023
- 2024
- 500
- 77
- a
- 精度
- 正確な
- 達成
- アルゴリズム
- アルゴリズム
- ことができます
- また
- および
- 角度の
- 見かけ上
- です
- At
- 自動車
- 自律的
- 自律車両
- BE
- になる
- さ
- ビジネス
- 焙煎が極度に未発達や過発達のコーヒーにて、クロロゲン酸の味わいへの影響は強くなり、金属を思わせる味わいと乾いたマウスフィールを感じさせます。
- by
- 缶
- 機能
- 機能
- 課題
- 来ます
- 従来の
- 作成した
- 重大な
- 12月
- 需要
- 詳細な
- 検出
- 開発
- 異なります
- ドメイン
- 運転
- デュレーション
- EARTH
- 効率的な
- 採用
- 環境
- 環境の
- 評価
- 進化
- フィールド
- 周波数
- 完全に
- グローバル
- 助けます
- こちら
- ハイ
- 高解像度の
- しかしながら
- HTTPS
- 巨大な
- IEEE
- 画像
- 画像
- in
- 増加
- の増加
- ますます
- IT
- 旅
- 長さ
- レベル
- レベル4
- 可能性が高い
- ローカライゼーション
- 長い
- 製
- 多くの
- 地図
- マッピング
- 測定
- 測定結果
- 分
- 行方不明
- 他には?
- もっと効率的
- ナビゲーション
- 必要
- ネットワーク
- 新作
- 観察
- 得
- of
- 頻繁に
- on
- ONE
- の
- 開いた
- が
- 紙素材
- 舗装
- 知覚
- プラトン
- プラトンデータインテリジェンス
- プラトデータ
- 位置
- PLM platform.
- プレゼント
- 原則
- 処理
- 進捗
- 提供します
- 公表
- 純粋に
- 品質
- R
- レーダー
- 範囲
- 最近
- 相対
- 顕著
- 研究者
- 解像度
- 革命
- 堅牢な
- より安全な
- 衛星
- センサー
- センサー
- 同時
- から
- 解決します
- ステージ
- まだ
- 周囲の
- 合成
- システム
- 技術的
- テクノロジー
- テクノロジー
- より
- それ
- この
- 従って
- タイトル
- 〜へ
- 取引
- 輸送サービス
- 2
- 最終的に
- 大学
- 自動車
- 車
- ました
- 仕方..
- which
- 意志
- 年
- ゼファーネット