HELSINKI — Pendarat SLIM Jepang mencapai tujuannya untuk melakukan pendaratan di bulan secara akurat dengan hanya satu dari dua pendorong utama yang beroperasi, JAXA menyatakan pada hari Kamis, sementara penjelajah kecil mengembalikan gambar pesawat ruang angkasa tersebut.
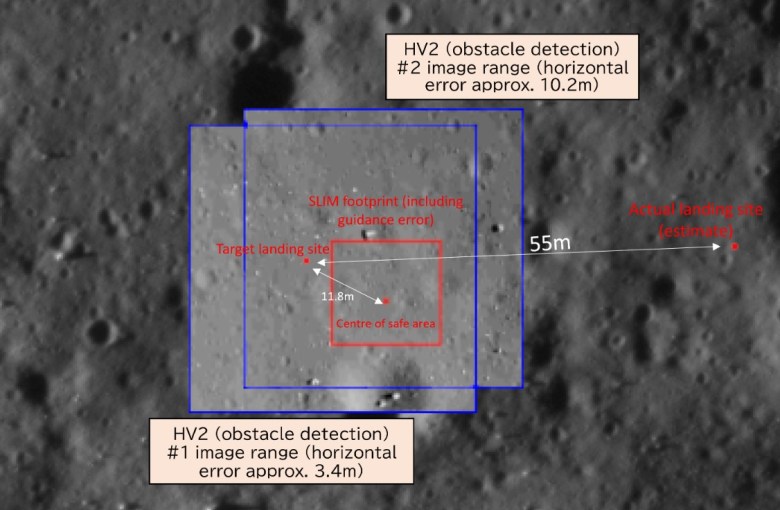
SLIM melakukan pendaratan tepat di 25.24889 Timur, 13.31549 Selatan di lereng kawah Shioli, 55 meter dari titik target, kata Shinichiro Sakai, manajer proyek tim SLIM di JAXA, saat konferensi pers Kamis pagi (25 Januari), memenuhi a kriteria misi utama.
Badan tersebut bertujuan untuk melakukan pendaratan dengan presisi tinggi, yang didefinisikan sebagai berada dalam jarak 100 meter dari titik target.
SLIM berhasil pendaratan di bulan yang bersejarah 19 Januari, juga berhasil melepaskan sepasang penjelajah kecil ke permukaan sesaat sebelum mendarat. Pendaratan SLIM menjadikan Jepang negara kelima yang mendarat di bulan, namun masalah pembangkit listrik membuat waktu aktif pesawat ruang angkasa di permukaan menjadi berkurang. potong pendek. Namun masih ada harapan agar SLIM dapat diaktifkan kembali sebelum akhir bulan.
Namun Sakai mengungkapkan bahwa salah satu dari dua pendorong utama kemungkinan besar gagal pada fase pendaratan terakhir. Hal ini terjadi dari ketinggian 50 meter hingga mendarat, mengakibatkan gerakan lateral yang tidak disengaja di atas.
“Dalam keadaan seperti ini, perangkat lunak bawaan SLIM secara mandiri mengidentifikasi anomali tersebut, dan sambil mengontrol posisi horizontal sebanyak mungkin, SLIM melanjutkan penurunan dengan mesin lainnya dan bergerak secara bertahap ke arah timur.”
Pendaratan SLIM dimaksudkan untuk dilakukan dalam dua langkah. Pertama dengan mendaratkan pendorong ke bawah, kemudian pendorong yang lebih kecil ditembakkan untuk mengarahkan pesawat ruang angkasa ke sisinya. SLIM kemudian ditopang oleh lima kaki pendaratan kisi aluminium cetak 3D yang dapat dihancurkan.
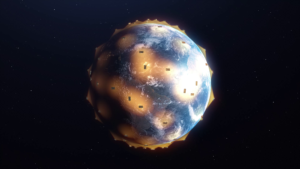
Gambar SLIM yang diambil oleh salah satu penjelajah, Transformable Lunar Robot LEV-2, menunjukkan bahwa pesawat ruang angkasa tersebut berada di permukaan bulan dengan pendorongnya mengarah ke atas. Penyebab kerusakan mesin sedang diselidiki.
Posisi pendaratan berarti susunan panel surya SLIM menghadap ke arah barat, sehingga pada awalnya tidak menerima sinar matahari. Namun JAXA menyatakan ada kemungkinan sel surya dapat menghasilkan listrik pada malam bulan seiring dengan peningkatan pencahayaan.
“Meskipun aktivitas SLIM di Bulan awalnya diperkirakan hanya berlangsung beberapa hari, persiapan yang diperlukan untuk pemulihan akan terus dilakukan guna memperoleh data teknis dan ilmiah lebih lanjut,” a pernyataan baca.
Situasi ini mengingatkan pada pendarat Philae sebagai bagian dari misi Rosetta di Eropa. Philae terpental saat melakukan upaya pendaratan di Komet 67P pada tahun 2014. Ia juga mengalami masalah pencahayaan sebelum sempat bangkit kembali.
JAXA sebelumnya menyatakan bahwa SLIM memutus baterainya sebesar 12%, sesuai rencana, untuk mencegah pengosongan berlebih. SLIM dimatikan pada 12:57 Timur (1757 UTC) pada 19 Januari, hanya dua setengah jam setelah mendarat pada 10:20 Timur (1520 UTC).
Kamera spektroskopi multiband (MBC) yang dipasang pada SLIM mampu beroperasi dalam uji coba dan menangkap gambar sebelum listrik dimatikan. JAXA diterbitkan gambar MBC yang dibuat dengan mensintesis 257 gambar monokrom resolusi rendah. MBC akan diberlakukan jika SLIM dapat diaktifkan kembali.
“Persiapan sedang dilakukan untuk segera melakukan pengamatan spektroskopi resolusi tinggi 10-band setelah kondisi penerangan matahari membaik dan SLIM pulih dari daya yang dihasilkan oleh susunan surya,” kata JAXA.
Kendaraan penjelajah kecil Lunar Excursion Vehicle (LEV-2.1) seberat 1 kilogram berhasil melakukan aktivitas di permukaan bulan, termasuk melakukan gerakan lompatan yang direncanakan. LEV-1 mencapai komunikasi langsung dengan stasiun bumi, termasuk uji transmisi data gelombang radio antar robot dari LEV-2. Akuisisi gambar oleh LEV-1 belum dikonfirmasi sampai sekarang, menurut JAXA.
LEV-1 dalam keadaan siaga di permukaan bulan. “Meskipun kemampuan untuk melanjutkan aktivitas bergantung pada pembangkit listrik tenaga surya dari perubahan arah matahari, upaya akan terus dilakukan untuk terus menerima sinyal dari LEV-1,” kata JAXA.
Penjelajah LEV-0.25 berukuran bisbol, berbobot 2 kg, yang dijuluki SORA-Q, digerakkan di permukaan bulan dan dicitrakan SLIM. “Kami saat ini sedang menganalisis data lain, termasuk catatan perjalanan, dan berencana untuk mempublikasikan hasilnya di masa mendatang,” kata JAXA dalam sebuah pernyataan. pernyataan di penjelajah.
LEV-2 dikembangkan bersama oleh JAXA, Tomy, Sony dan Universitas Doshisha. Ini adalah penjelajah bulan terkecil dan teringan yang pernah ada, menurut JAXA.
“LEV-2 “SORA-Q”, yang dikembangkan dengan menggabungkan teknologi mainan, teknologi robotika sensor terbaru, dan teknologi luar angkasa JAXA, serta memiliki karakteristik operasi dan gerak otonom yang sangat baik,” kata Direktur Pusat Inovasi Eksplorasi Luar Angkasa JAXA Kazuyuki Funaki.
Matahari terbenam di atas kawah Shioli diperkirakan terjadi sekitar awal UTC pada tanggal 31 Januari. Baik SLIM maupun penjelajahnya tidak membawa unit pemanas radioisotop. Oleh karena itu, mereka diperkirakan tidak dapat bertahan hidup pada malam hari di bulan, ketika suhu akan turun hingga minus 130 Celcius.
- Konten Bertenaga SEO & Distribusi PR. Dapatkan Amplifikasi Hari Ini.
- PlatoData.Jaringan Vertikal Generatif Ai. Berdayakan Diri Anda. Akses Di Sini.
- PlatoAiStream. Intelijen Web3. Pengetahuan Diperkuat. Akses Di Sini.
- PlatoESG. Karbon, teknologi bersih, energi, Lingkungan Hidup, Tenaga surya, Penanganan limbah. Akses Di Sini.
- PlatoHealth. Kecerdasan Uji Coba Biotek dan Klinis. Akses Di Sini.
- Sumber: https://spacenews.com/japans-slim-achieved-pinpoint-moon-landing-with-just-one-working-engine/
- :memiliki
- :adalah
- :bukan
- ][P
- 1
- 10
- 100
- 12
- 13
- 130
- 19
- 20
- 2014
- 25
- 31
- 50
- a
- Sanggup
- atas
- Menurut
- tepat
- dicapai
- memperoleh
- diperoleh
- perolehan
- Tindakan
- aktif
- kegiatan
- kegiatan
- Setelah
- badan
- ditujukan
- juga
- an
- menganalisis
- dan
- semu
- ADALAH
- sekitar
- susunan
- AS
- At
- usaha
- sikap
- otonom
- secara mandiri
- dasar
- baterai
- BE
- menjadi
- sebelum
- makhluk
- secara singkat
- tapi
- by
- kamar
- CAN
- kemampuan
- menangkap
- ditangkap
- membawa
- Menyebabkan
- Sel
- Celsius
- Perubahan
- karakteristik
- keadaan
- menggabungkan
- Komunikasi
- kondisi
- Mengadakan
- dilakukan
- Konferensi
- DIKONFIRMASI
- terus
- terus
- mengendalikan
- negara
- dibuat
- Sekarang
- nyaman
- data
- Hari
- didefinisikan
- dikembangkan
- langsung
- arah
- Kepala
- terputus
- turun
- didorong
- penggerak
- Menjatuhkan
- selama
- Awal
- Timur
- timur
- upaya
- listrik
- akhir
- Mesin
- Eropa
- malam
- pERNAH
- unggul
- dieksekusi
- ada
- diharapkan
- eksplorasi
- menghadapi
- Gagal
- beberapa
- kelima
- terakhir
- penembakan
- Pertama
- lima
- Untuk
- dari
- memenuhi
- lebih lanjut
- masa depan
- menghasilkan
- dihasilkan
- generasi
- tujuan
- bertahap
- Tanah
- Setengah
- resolusi tinggi
- berharap
- Horisontal
- JAM
- Namun
- HTML
- HTTPS
- Pusat
- mengidentifikasi
- if
- gambar
- gambar
- meningkatkan
- in
- Termasuk
- India
- mulanya
- Innovation
- dimaksudkan
- ke
- masalah
- IT
- NYA
- jan
- Jepang
- Jepang
- jpg
- hanya
- hanya satu
- kunci
- Tanah
- pendaratan
- Terakhir
- Terbaru
- kaki
- Mungkin
- Imlek
- terbuat
- Utama
- Membuat
- manajer
- max-width
- MBC
- berarti
- Misi
- satu warna
- Bulan
- bulan
- gerakan
- terharu
- gerak-gerik
- banyak
- Navigasi
- perlu
- juga tidak
- maupun
- terkenal
- sekarang
- pengamatan
- terjadi
- of
- lepas
- on
- Di atas kapal
- sekali
- ONE
- hanya
- beroperasi
- operasi
- operasi
- urutan
- semula
- Lainnya
- lebih
- pasangan
- bagian
- tahap
- Film
- Tempat
- rencana
- berencana
- plato
- Kecerdasan Data Plato
- Data Plato
- Titik
- posisi
- kemungkinan
- mungkin
- kekuasaan
- didukung
- perlu
- pers
- mencegah
- sebelumnya
- masalah
- proyek
- menerbitkan
- menempatkan
- radio
- menerima
- Sembuh
- pemulihan
- melepaskan
- sisa
- mengingatkan
- dihasilkan
- Hasil
- lanjut
- Terungkap
- Mengungkapkan
- robot
- robotika
- bajak
- Tersebut
- ilmiah
- Sensor
- sisi
- sinyal
- situasi
- Lereng
- kecil
- lebih kecil
- Perangkat lunak
- tenaga surya
- Sel surya
- Solar Power
- Sony
- Selatan
- Space
- eksplorasi ruang angkasa
- pesawat ruang angkasa
- Negara
- menyatakan
- Negara
- Stasiun
- Tangga
- berhasil
- matahari
- sinar matahari
- Permukaan
- bertahan
- diambil
- target
- tim
- Teknis
- Teknologi
- uji
- bahwa
- Grafik
- Masa depan
- kemudian
- Sana.
- Ini
- mereka
- ini
- Kamis
- Demikian
- waktu
- ujung
- untuk
- mengambil
- terhadap
- mainan
- percobaan
- Berbalik
- dua
- Sedang berlangsung
- unit
- universitas
- ke atas
- UTC
- kendaraan
- adalah
- Gelombang
- adalah
- ketika
- yang
- sementara
- akan
- dengan
- dalam
- kerja
- zephyrnet.dll