یہ مختصر پوسٹ کچھ لیزر سٹیشن کے اضافہ کو بیان کرتی ہے جو ہم نے اپنے تجربات کو دور سے چلانے کے قابل بنانے کے لیے کی ہیں۔
سیٹ اپ کے مسائل
ہمارا لیزر فالٹ انجیکشن پلیٹ فارم ایک مائکروسکوپ سے بنا ہے جس کا استعمال لیزر سورس کو ٹیسٹ کے تحت کسی ڈیوائس پر فوکس کرنے کے لیے کیا جاتا ہے۔ یہ ایک اورکت کیمرے سے لیس ہے تاکہ ٹارگٹڈ چپ کے اندرونی فن تعمیر کا مشاہدہ کیا جا سکے اور لیزر بیم کی شکل کو ایڈجسٹ کیا جا سکے۔ خوش قسمتی سے، یہ ایک موٹرائزڈ اسٹیج سے لیس ہے جو ہماری کسٹم سافٹ ویئر ایپلیکیشن سے لیزر بیم کو چپ پر منتقل کرنے کی اجازت دیتا ہے۔ ہمارے تیار کردہ تمام ٹولز لینکس آپریٹنگ سسٹم پر چلتے ہیں، اور اس لیے انہیں SSH کنکشن کے ذریعے استعمال کرنا ممکن ہے، بشرطیکہ آپ کے پاس اچھا انٹرنیٹ کنکشن ہو۔ ہمیں مائیکروسکوپ کیمرہ لائیو امیج سے نمٹنے میں تاخیر کے کچھ مسائل کا سامنا کرنا پڑا، جسے ہم نے SSH کمپریشن آپشن کو آن کر کے جلدی سے حل کیا (-C) جو بطور ڈیفالٹ فعال نہیں ہوتا ہے اور مطلوبہ اسٹریمنگ بینڈوتھ کو بہت حد تک کم کرتا ہے۔ بہر حال، اس وقت کچھ عناصر کی صورتحال میں مداخلت کی ضرورت ہے:
- کیمرہ کی روشنی کے منبع کو کنٹرول کرنا: ایک وقف شدہ سامان کیمرے کے تصور کے لیے چپ کو روشن کرنے کے لیے اورکت روشنی فراہم کرتا ہے۔
- مکینیکل کیمرہ شٹر کھولنا یا بند کرنا: یہ شٹر مائکروسکوپ کا حصہ ہے اور لیزر استعمال کرتے وقت اسے بند کرنا ضروری ہے۔
- خوردبین کے مقصد کو تبدیل کرنا: 4 مختلف نظری مقاصد ایک مکینیکل گھومنے والے برج پر نصب ہیں اور مختلف مائکروسکوپ کی میگنیفیکیشن کی اجازت دیتے ہیں۔
ذیل میں تفصیل دی گئی ہے کہ ہم نے شٹر اور روشنی کے منبع کو دور سے کنٹرول کرنے کے لیے اپنے ٹیسٹ بینچ کو کس طرح حسب ضرورت بنایا۔ خاص طور پر، ہم ان موافقت کی لاگت کو محدود کرنا چاہتے تھے، اور اسے جلد از جلد دستیاب کرانا چاہتے تھے۔
روشنی کے منبع کو کنٹرول کرنا
سیمی کنڈکٹرز کا سلکان سبسٹریٹ اورکت روشنی کے لیے نیم شفاف ہوتا ہے، اور ایک اورکت کیمرے کے ساتھ، اس لیے سرکٹس کی اندرونی ساخت کا مشاہدہ کرنا ممکن ہے۔ مشاہدے کو ممکن بنانے کے لیے، سرکٹ کو انفراریڈ روشنی کے ذریعہ سے روشن ہونا چاہیے۔ ہماری لیزر مائیکروسکوپ ایک وقف شدہ روشنی کے منبع کے سامان کے ساتھ بھیجی گئی تھی، a حیاشی LA-150CE، جس میں روشنی کی شدت کو ایڈجسٹ کرنے کے لیے پاور سوئچ اور ایک نوب ہے، جیسا کہ ذیل میں دکھایا گیا ہے۔ جب لیزر ٹیسٹنگ مہم شروع کی جاتی ہے، تو ہم عام طور پر روشنی کے منبع کو بند کر دیتے ہیں کیونکہ یہ اجزاء میں مداخلت کر سکتا ہے، خاص طور پر جب نمونے پتلے کیے جاتے ہیں۔

سامان کے پچھلے حصے کو دیکھتے ہوئے، ہمیں ایک "ریموٹ" سوئچ ملا اور ایک بیرونی کنیکٹر دستیاب تھا۔ ہم سمجھتے ہیں کہ یہ روشنی کا ذریعہ ماضی کے کچھ ہزار سالہ کنیکٹر کے ذریعے ریموٹ کنٹرول کی صلاحیت فراہم کرتا ہے۔ ویب پر بہت کم دستاویزات مل سکتی ہیں، لیکن ہم نے حیاشی کیٹلوگ میں شناخت کیا کہ وہاں موجود ہے۔ LAN کنٹرول یونٹ اس روشنی کے منبع کے ساتھ ہم آہنگ۔ تاہم اس کی مصنوعات کو بند کر دیا گیا ہے. نیز، LAN کنیکٹیویٹی زیادہ آسان نہیں ہے۔ اسی کیٹلاگ میں، ہمیں روشنی کے منبع کے کنیکٹر کے لیے تفصیلات ملیں۔ اگرچہ یہ بہت تفصیلی نہیں ہے، لیکن یہ کوشش کرنے کے لئے کافی تھا.
حیاشی پروڈکٹس کیٹلاگ سے ریموٹ کنٹرول پن آؤٹ: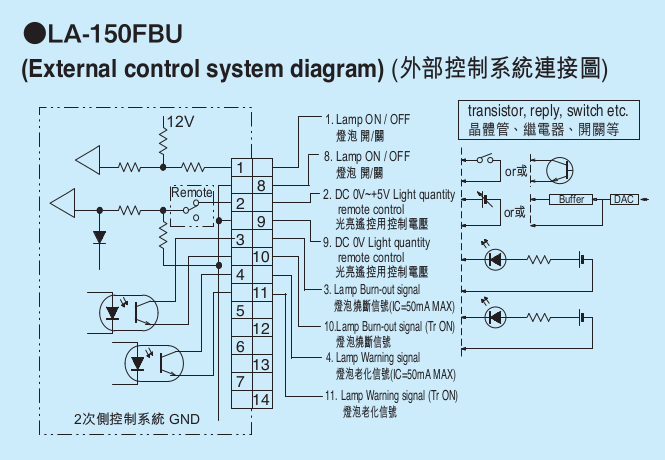
یہ انٹرفیس دو اہم دلچسپ خصوصیات فراہم کرتا ہے:
- ڈیجیٹل پن 1 اور 8 کو شارٹ کرکے یا نہ کرکے لیمپ کو آن اور آف کرنے کے لیے استعمال کیا جا سکتا ہے۔ پن 8 اصل میں زمین ہے، لہذا صرف پن 1 واقعی متعلقہ ہے.
- اینالاگ پن 2 روشنی کی شدت کو 0 V (کم سے کم شدت) سے 5 V (زیادہ سے زیادہ شدت) کے سگنل کے ساتھ کنٹرول کرتا ہے۔ جب ریموٹ موڈ کو فعال کیا جاتا ہے، تو سامنے والے پینل پوٹینشیومیٹر کو نظرانداز کیا جاتا ہے اور روشنی کی شدت کو براہ راست اس پن سے کنٹرول کیا جاتا ہے۔
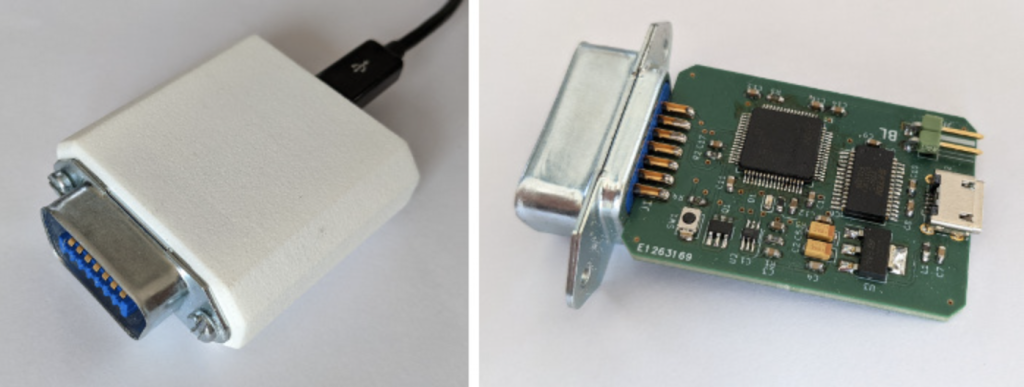
ہم نے شروع سے خود ہی تعمیر کرنے کا فیصلہ کیا۔ حیاشی لائٹ ریموٹ کنٹرولر مندرجہ ذیل حصوں کا استعمال کرتے ہوئے:
- ایمبیڈڈ ایپلیکیشن کوڈ کی میزبانی کے لیے ایک STM32 مائیکرو کنٹرولر،
- ایک FT232 USB سے سیریل کنورٹر USB سے ڈونگل کو کنٹرول کرنے کی اجازت دیتا ہے،
- روشنی کی شدت کو کنٹرول کرنے کے لیے 5621 سے 0V ینالاگ سگنل جنریشن کے لیے ایک AD5B ڈیجیٹل سے اینالاگ کنورٹر۔
ہم نے پی سی بی کا استعمال کرتے ہوئے ڈیزائن کیا۔ KiCad. سچ پوچھیں تو، یہ ڈیزائن تھوڑا بڑا ہو سکتا ہے: مائیکرو کنٹرولر موجودہ ضرورت کے لیے بہت بڑا ہے، اور FT232 کو ہٹایا جا سکتا ہے کیونکہ STM32 ڈیوائسز میں پہلے سے ہی USB کی صلاحیتیں موجود ہیں، سافٹ ویئر ڈویلپمنٹ وقت کی قیمت پر۔ ہمارا مقصد اسے فوری اور گندا بنانا اور ہمارے پہلے سے تیار کردہ کچھ اسکیمیٹکس کو دوبارہ استعمال کرنا تھا۔
تفریح کے لیے، اور چونکہ ہمیں یقین ہے کہ یہ ایک بہت ہی امید افزا زبان ہے، ہم نے Rust میں مائیکرو کنٹرولر فرم ویئر تیار کیا۔
ہم نے آخر کار استعمال کرتے ہوئے ایک سادہ پلاسٹک انکلوژر ڈیزائن کیا۔ FreeCAD، اور اس کے ساتھ پرنٹ کیا۔ مجسمہ.
غیر متوقع طور پر، اس پروجیکٹ کا سب سے مشکل حصہ کنیکٹر کی شناخت کرنا تھا (مردوں کے لیے ایمفینول سے حوالہ 5710140)، اور اسے خریدنا بھی تھا کیونکہ یہ متروک ہے اور بہت سے سپلائرز کے ذریعہ فروخت نہیں کیا جاتا ہے۔ حصہ فراہم کنندہ سرچ انجن آکٹوپارٹ مدد کرسکتے ہیں.
تمام اسکیمیٹکس اور ڈیزائن فائلیں ہمارے پر دستیاب ہیں۔ GitHub ذخیرہ.
کیمرے کے شٹر کو کنٹرول کرنا
خوردبین میں، لیزر بیم اور کیمرہ ایک ہی نظری راستے کا اشتراک کرتے ہیں۔ جب لیزر شوٹنگ کر رہا ہوتا ہے، تو روشنی کا ایک حصہ سلکان سے منعکس ہوتا ہے اور کیمرے سے ٹکرائے گا۔ سینسر کو پہنچنے والے نقصان کو روکنے کے لیے جس کے نتیجے میں ڈیڈ پکسلز میں طویل مدتی ہو سکتا ہے، کیمرے کے سامنے ایک آپٹیکل مکینیکل شٹر بند کیا جا سکتا ہے۔ شٹر دستی ہے اور اسے چلانے کے لیے بہت کم یا کسی طاقت کی ضرورت نہیں ہے۔
ریموٹ کنٹرول کو ممکن بنانے کے لیے، ہم نے ایک چھوٹی سٹیپر موٹر خریدی۔ پولو سے TIC T834 سٹیپر موٹر کنٹرولر. ہم نے موٹر کے ساتھ شٹر کو حرکت دینے کے لیے 3D گیئرز اور مائکروسکوپ پر نصب کرنے کے لیے ایک باڈی تیار اور پرنٹ کی۔
TIC T834 کو موٹر کو توانائی فراہم کرنے کے لیے پاور سورس کی ضرورت ہوتی ہے، لیکن چونکہ ہماری موٹر زیادہ کرنٹ نہیں کھینچتی ہے، اس لیے ہم نے موٹر کو پاور کرنے کے لیے T834 کی USB پاور سپلائی کو بھی مختصر کر دیا۔ TIC کنٹرولرز سیٹ اپ اور استعمال کرنے میں بہت آسان ہیں، یہ اچھی طرح سے دستاویزی ہے اور ہمیں اپنے سافٹ ویئر ٹولز سے موٹر کو کنٹرول کرنے میں بہت کم وقت لگا۔ ہم نے Python میں ایک چھوٹی کنٹرولر کلاس تیار کی ہے جو اب ہمارے میں مربوط ہے۔ pystages لائبریری.
اسٹیپر موٹر کنٹرولرز کو موٹر کی موجودہ پوزیشن معلوم کرنے کی ضرورت ہوتی ہے جب اسے آن کیا جاتا ہے۔ یہ ایک ابتدائی طریقہ کار کے ساتھ کیا جاتا ہے جہاں موٹر اس وقت تک گھومے گی جب تک کہ ایک رابطہ سوئچ کنٹرولر کو یہ نہیں بتاتا کہ موٹر صفر کی پوزیشن پر ہے۔ ہم نے T834 سے براہ راست منسلک ایک سادہ سوئچ استعمال کیا جس میں یہ خصوصیت بلٹ ان ہے۔
ہم نے جو 3D باڈی پارٹ پرنٹ کیا وہ بہت درست نہیں تھا اور پہلی بار دونوں گیئرز صحیح طریقے سے کام نہیں کر رہے تھے۔ گرمی کا استعمال کرتے ہوئے ہم گیئرز کے درمیان خلا کو درست کرنے کے لیے پلاسٹک کے حصے کو تھوڑا سا موڑ سکتے ہیں۔ کچھ ایڈجسٹمنٹ کے بعد، ہم کیمرے کے شٹر کو دور سے کھولنے اور بند کرنے کے قابل ہو گئے!
مکینیکل ڈیزائن ہمارے پر دستیاب ہے۔ GitHub ذخیرہ.
فائنل خیالات
روشنی کے منبع اور کیمرہ شٹر کے کنٹرول کو مربوط کرنے سے ہمیں بہت سی لیزر ٹیسٹنگ مہمیں دور سے چلانے کی اجازت ملی۔ یہ پہلے کی نسبت زیادہ آسان بھی ہے، کیونکہ لیزر کے آن ہونے پر اب شٹر بند کرنا اور لائٹ بند کرنا خود بخود ہو سکتا ہے، جبکہ اس سے پہلے انسانی جسمانی مداخلت کی ضرورت تھی اور اسے آسانی سے بھلایا جا سکتا ہے۔
مقاصد کے برج کے کنٹرول کے بارے میں، پہلے سے ہی موٹرائزڈ برج موجود ہیں، لیکن بدقسمتی سے وہ کافی مہنگے ہیں، اور اسے تبدیل کرنا مشکل ہو سکتا ہے۔ اس لمحے کے لیے، ہمیں کوئی آسان اور کم خرچ حل نہیں ملا۔ بیرونی موٹر کے ساتھ برج کو گھمانا مشکل ہے، خاص طور پر اس لیے کہ ایک چشمہ ہے جو برج کو اپنی جگہ پر بند کر دیتا ہے جب مقصد خوردبین سے منسلک ہوتا ہے۔ اس کے علاوہ، جو وزن ہم موٹرائزڈ مرحلے میں شامل کر سکتے ہیں وہ محدود ہے۔ یہ اس وقت ایک کھلا مسئلہ ہے، لیکن یہ دور سے کام کرنے سے نہیں روکتا، ہم صرف ایک منتخب میگنیفیکیشن تک محدود ہیں۔
آخر میں، جب نمونہ ٹوٹ جاتا ہے تو اسے تبدیل کرنے کے لیے لیب تک رسائی کی ضرورت ہوتی ہے۔ خوش قسمتی سے، یہ اکثر نہیں ہوتا ہے. ہم بالآخر ایک ہی بیٹی بورڈ پر بہت سے سرکٹس کو ملٹی پلیکس کر سکتے ہیں، لہذا ہم جسمانی تبدیلی کی ضرورت سے پہلے کچھ آلات کو جلا سکتے ہیں، پھر بھی ہم نے ایسا حل تیار نہیں کیا۔

- SEO سے چلنے والا مواد اور PR کی تقسیم۔ آج ہی بڑھا دیں۔
- پلیٹوآئ اسٹریم۔ ویب 3 ڈیٹا انٹیلی جنس۔ علم میں اضافہ۔ یہاں تک رسائی حاصل کریں۔
- ایڈریین ایشلے کے ساتھ مستقبل کا نقشہ بنانا۔ یہاں تک رسائی حاصل کریں۔
- PREIPO® کے ساتھ PRE-IPO کمپنیوں میں حصص خریدیں اور بیچیں۔ یہاں تک رسائی حاصل کریں۔
- ماخذ: https://www.ledger.com/blog/laser-improvements
- : ہے
- : ہے
- : نہیں
- :کہاں
- 1
- 14
- 24
- 3d
- 8
- a
- قابلیت
- تک رسائی حاصل
- درست
- کے پار
- اصل میں
- موافقت
- شامل کریں
- ایڈجسٹمنٹ
- کے بعد
- منسلک
- تمام
- کی اجازت
- کی اجازت دیتا ہے
- پہلے ہی
- بھی
- an
- اور
- کوئی بھی
- اب
- درخواست
- فن تعمیر
- کیا
- AS
- At
- خود کار طریقے سے
- دستیاب
- بینڈوڈتھ
- BE
- بیم
- کیونکہ
- اس سے پہلے
- یقین ہے کہ
- نیچے
- کے درمیان
- بگ
- بٹ
- جسم
- خریدا
- ٹوٹ
- تعمیر
- تعمیر میں
- جلا
- لیکن
- by
- کیمرہ
- مہم
- مہمات
- کر سکتے ہیں
- صلاحیتوں
- کیٹلوگ
- چپ
- طبقے
- کلوز
- بند
- اختتامی
- کوڈ
- ہم آہنگ
- اجزاء
- منسلک
- کنکشن
- رابطہ
- رابطہ کریں
- کنٹرول
- کنٹرول
- کنٹرولر
- کنٹرولنگ
- کنٹرول
- آسان
- درست
- قیمت
- سکتا ہے
- موجودہ
- اپنی مرضی کے
- اپنی مرضی کے مطابق
- مردہ
- معاملہ
- فیصلہ کیا
- وقف
- پہلے سے طے شدہ
- ڈیزائن
- ڈیزائن
- تفصیلی
- ترقی
- ترقی یافتہ
- ترقی
- آلہ
- کے الات
- DID
- مختلف
- مشکل
- براہ راست
- دستاویزات
- کرتا
- کیا
- نیچے
- اپنی طرف متوجہ
- کے دوران
- آسانی سے
- آسان
- عناصر
- ایمبیڈڈ
- چالو حالت میں
- توانائی
- اضافہ
- کافی
- کا سامان
- لیس
- خاص طور پر
- آخر میں
- وجود
- موجود ہے
- مہنگی
- تجربات
- بیرونی
- سامنا
- غلطیاں
- نمایاں کریں
- خصوصیات
- چند
- فائلوں
- آخر
- مل
- پہلا
- پہلی بار
- توجہ مرکوز
- کے بعد
- کے لئے
- مجبور
- بھول گیا
- خوش قسمتی سے
- ملا
- کسر
- سے
- سامنے
- مزہ
- فرق
- نسل
- مقصد
- اچھا
- بہت
- گراؤنڈ
- ہو
- ہارڈ
- ہے
- مدد
- مارو
- میزبان
- کس طرح
- تاہم
- HTTPS
- انسانی
- کی نشاندہی
- کی نشاندہی
- تصویر
- in
- ضم
- دلچسپ
- انٹرفیس
- مداخلت
- اندرونی
- انٹرنیٹ
- انٹرنیٹ کنکشن
- مداخلت
- مسئلہ
- مسائل
- IT
- صرف
- لیب
- زبان
- لیزر
- تاخیر
- تاخیر کے مسائل
- لیجر
- لائبریری
- روشنی
- LIMIT
- لمیٹڈ
- لینکس
- تھوڑا
- رہتے ہیں
- تالے
- لانگ
- بہت
- کم قیمت
- بنا
- مین
- بنا
- بنانا
- دستی
- بہت سے
- زیادہ سے زیادہ چوڑائی
- زیادہ سے زیادہ
- مئی..
- میکانی
- خوردبین
- ہزاریہ
- کم سے کم
- موڈ
- لمحہ
- زیادہ
- سب سے زیادہ
- موٹر
- منتقل
- منتقل
- ضروری
- ضرورت ہے
- ضرورت ہے
- نہیں
- اب
- مقصد
- مقاصد
- مشاہدہ
- غیر معمولی
- of
- بند
- تجویز
- اکثر
- on
- صرف
- کھول
- کام
- آپریٹنگ سسٹم
- اختیار
- or
- حکم
- ہمارے
- باہر
- وبائی
- پینل
- حصہ
- خاص طور پر
- حصے
- گزشتہ
- راستہ
- جسمانی
- پائن
- مقام
- پلاسٹک
- پلیٹ فارم
- پلاٹا
- افلاطون ڈیٹا انٹیلی جنس
- پلیٹو ڈیٹا
- پوزیشن
- ممکن
- پوسٹ
- طاقت
- بجلی کی فراہمی
- طاقت
- کی روک تھام
- مصنوعات
- حاصل
- منصوبے
- وعدہ
- فراہم
- فراہم
- فراہم کرتا ہے
- خرید
- ازگر
- فوری
- جلدی سے
- لے کر
- واقعی
- کم
- جھلکتی ہے
- متعلقہ
- ریموٹ
- ہٹا دیا گیا
- کی جگہ
- متبادل
- ضرورت
- کی ضرورت ہے
- نتیجہ
- دوبارہ استعمال
- رن
- مورچا
- اسی
- تلاش کریں
- منتخب
- Semiconductors
- سیٹ اپ
- شکل
- سیکنڈ اور
- بھیج دیا
- شوٹنگ
- مختصر
- Shorted
- مختصر
- کی طرف
- اشارہ
- سلیکن
- سادہ
- بعد
- ایک
- چھوٹے
- So
- سافٹ ویئر کی
- سوفٹ ویئر کی نشوونما
- فروخت
- حل
- کچھ
- اسی طرح
- ماخذ
- تصریح
- سپن
- موسم بہار
- اسٹیج
- شروع
- سٹیشن
- ابھی تک
- ایس ٹی ایم 32
- محرومی
- ساخت
- اس طرح
- سپلائرز
- فراہمی
- سوئچ کریں
- کے نظام
- ھدف بنائے گئے
- بتاتا ہے
- ٹیسٹ
- ٹیسٹنگ
- سے
- کہ
- ۔
- ان
- وہاں.
- لہذا
- وہ
- اس
- ان
- اگرچہ؟
- کے ذریعے
- وقت
- کرنے کے لئے
- بھی
- لیا
- اوزار
- کوشش
- تبدیل کر دیا
- ٹرننگ
- دو
- کے تحت
- سمجھا
- بدقسمتی سے
- جب تک
- us
- USB
- استعمال کی شرائط
- استعمال کیا جاتا ہے
- کا استعمال کرتے ہوئے
- عام طور پر
- بہت
- تصور
- چاہتے تھے
- تھا
- we
- ویب
- وزن
- اچھا ہے
- تھے
- جب
- جس
- گے
- ساتھ
- کام کر
- دور سے کام کرنا
- ابھی
- آپ
- زیفیرنیٹ
- صفر