03 مئی 2023 (نانورک نیوز) جب سے 2008 میں "نرم روبوٹکس" کی اصطلاح اپنائی گئی تھی، اس شعبے میں انجینئر تلاش، لوکوموشن، بحالی، اور یہاں تک کہ خلا میں کارآمد لچکدار مشینوں کی متنوع نمائشیں بنا رہے ہیں۔ الہام کا ایک ذریعہ: جس طرح سے جانور جنگل میں حرکت کرتے ہیں۔ ایم آئی ٹی کے محققین کی ایک ٹیم نے ترقی کرتے ہوئے اسے ایک قدم آگے بڑھایا ہے۔ سافٹ زو, ایک بائیو انسپائرڈ پلیٹ فارم جو انجینئرز کو نرم روبوٹ کو-ڈیزائن کا مطالعہ کرنے کے قابل بناتا ہے۔ فریم ورک الگورتھم کو بہتر بناتا ہے جو ڈیزائن پر مشتمل ہوتا ہے، جو اس بات کا تعین کرتا ہے کہ روبوٹ کیسا نظر آئے گا۔ اور کنٹرول، یا وہ نظام جو روبوٹک حرکت کو قابل بناتا ہے، اس میں بہتری لاتا ہے کہ کس طرح صارفین خود بخود ممکنہ مشینوں کے لیے خاکہ تیار کرتے ہیں۔
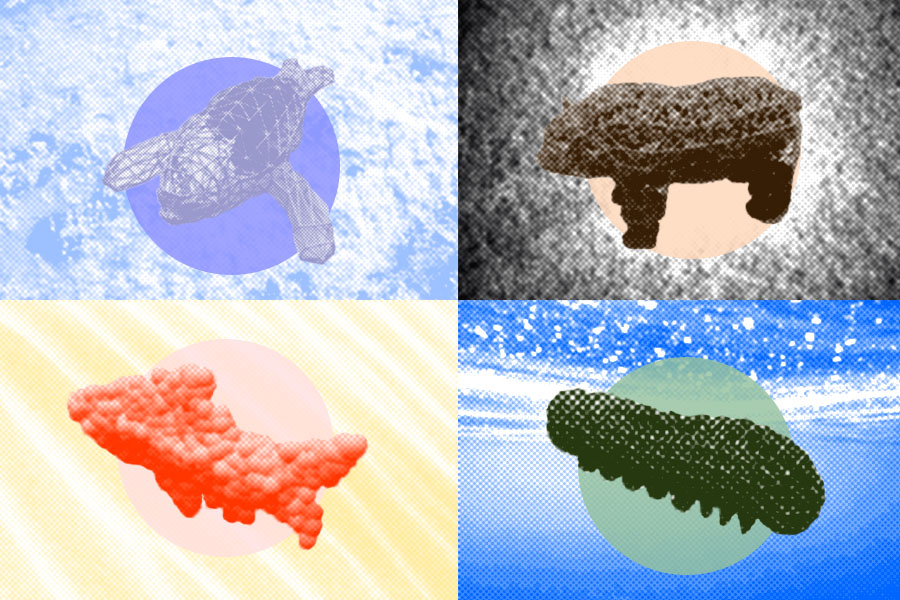 محققین نے نرم روبوٹ کو-ڈیزائن کے لیے ایک نظام تیار کیا، جس کا مطلب ہے مشترکہ طور پر روبوٹ ڈیزائن کے لیے تلاش کرنا اور اسے بہتر بنانا — روبوٹ کی شکل، روبوٹ کے جسم میں پٹھوں کو کہاں رکھنا ہے، جسم کے مختلف علاقوں میں روبوٹ کتنا نرم ہے۔ اور روبوٹ ڈیزائن کی بنیاد پر، ہدف کے کام کو حاصل کرنے کے لیے اسے کنٹرول کرنے کا طریقہ۔ (تصویر: Alex Shipps/MIT CSAIL اور محققین) جنگلی کنارے پر چہل قدمی کرتے ہوئے، پلیٹ فارم میں پانڈا ریچھ، مچھلیاں، شارک اور کیٹرپلر جیسے جانوروں کے 3-D ماڈلز کو ڈیزائن کے طور پر پیش کیا گیا ہے جو کہ لوکوموشن جیسے نرم روبوٹکس کے کاموں کی تقلید کر سکتے ہیں۔ , چست موڑ، اور مختلف ماحول میں راستے کی پیروی کرنا۔ چاہے برف، صحرا، مٹی، یا پانی کے ذریعے، پلیٹ فارم مختلف علاقوں میں مختلف ڈیزائنوں کی کارکردگی کا مظاہرہ کرتا ہے۔
"ہمارا فریم ورک صارفین کو روبوٹ کی شکل کے لیے بہترین ترتیب تلاش کرنے میں مدد کر سکتا ہے، جس سے وہ نرم روبوٹکس الگورتھم ڈیزائن کر سکتے ہیں جو بہت سے مختلف کام کر سکتے ہیں،" ایم آئی ٹی پی ایچ ڈی کے طالب علم سون-ہسوان وانگ کہتے ہیں، جو کمپیوٹر سائنس اور مصنوعی ذہانت کی لیبارٹری سے وابستہ ہیں۔ CSAIL) جو اس پراجیکٹ کا ایک اہم محقق ہے۔ "مختصر طور پر، یہ ہمیں روبوٹ کے ماحول کے ساتھ تعامل کرنے کی بہترین حکمت عملیوں کو سمجھنے میں مدد کرتا ہے۔" SoftZoo ملتے جلتے پلیٹ فارمز کے مقابلے میں زیادہ جامع ہے، جو پہلے سے ہی ڈیزائن اور کنٹرول کی نقل کرتا ہے، کیونکہ یہ نقل و حرکت کا نمونہ بناتا ہے جو مختلف بائیومز کی جسمانی خصوصیات پر رد عمل ظاہر کرتا ہے۔ فریم ورک کی استعداد ایک متفرق ملٹی فزکس انجن سے آتی ہے، جو ایک ہی وقت میں ایک جسمانی نظام کے کئی پہلوؤں کی نقالی کی اجازت دیتا ہے، جیسے کہ بچے کی مہر کا برف پر پھیرنا یا گیلے زمین کے ماحول میں کیٹرپلر کا انچنا۔ انجن کی تفریق کمپیوٹیشنل کنٹرول اور ڈیزائن کے مسائل کو حل کرنے کے لیے درکار اکثر مہنگے سمولیشنز کی تعداد کو کم کرکے شریک ڈیزائن کو بہتر بناتی ہے۔ نتیجے کے طور پر، صارف زیادہ نفیس، مخصوص الگورتھم کے ساتھ نرم روبوٹس کو ڈیزائن اور منتقل کر سکتے ہیں۔
نظام کی مختلف خطوں کے ساتھ تعاملات کی نقالی کرنے کی صلاحیت مورفولوجی کی اہمیت کو واضح کرتی ہے، حیاتیات کی ایک شاخ جو مختلف جانداروں کی شکلوں، سائزوں اور شکلوں کا مطالعہ کرتی ہے۔ ماحول پر منحصر ہے، کچھ حیاتیاتی ڈھانچے دوسروں کے مقابلے میں زیادہ بہتر ہوتے ہیں، جیسا کہ مشینوں کے بلیو پرنٹس کا موازنہ کرنا جو اسی طرح کے کام مکمل کرتی ہیں۔
یہ حیاتیاتی خاکہ زیادہ مخصوص، خطوں سے متعلق مصنوعی زندگی کی ترغیب دے سکتا ہے۔ وانگ کا کہنا ہے کہ "جیلی فش کی نرمی سے غیر منقسم جیومیٹری اسے پانی کے بڑے ذخائر میں مؤثر طریقے سے سفر کرنے کی اجازت دیتی ہے، محققین کو نرم روبوٹس کی نئی نسلیں تیار کرنے اور سلیکو میں مکمل طور پر کاشت کی جانے والی مصنوعی مخلوقات کے لامحدود امکانات کو کھولنے کی ترغیب دیتی ہے،" وانگ کہتے ہیں۔ "اس کے علاوہ، ڈریگن فلائیز بہت چست چالیں انجام دے سکتی ہیں جو دوسری اڑن مخلوق مکمل نہیں کر سکتیں کیونکہ ان کے پروں پر خاص ڈھانچے ہوتے ہیں جو اڑتے وقت اپنے مرکز کو تبدیل کر دیتے ہیں۔ ہمارا پلیٹ فارم لوکوموشن کو اسی طرح بہتر بناتا ہے جس طرح ایک ڈریگن فلائی قدرتی طور پر اپنے گردونواح میں کام کرنے میں زیادہ ماہر ہوتی ہے۔ روبوٹ پہلے بے ترتیبی کے ماحول سے گزرنے کے لیے جدوجہد کرتے تھے کیونکہ ان کے جسم اپنے اردگرد کے ماحول کے مطابق نہیں تھے۔ SoftZoo کے ساتھ، اگرچہ، ڈیزائنرز روبوٹ کے دماغ اور جسم کو بیک وقت تیار کر سکتے ہیں، اور زمینی اور آبی دونوں مشینوں کو زیادہ باخبر اور مہارت حاصل کرنے کے لیے آپٹمائز کر سکتے ہیں۔ بڑھتے ہوئے طرز عمل اور مورفولوجیکل انٹیلی جنس کے ساتھ، روبوٹ ریسکیو مشن کو مکمل کرنے اور ریسرچ کرنے میں زیادہ کارآمد ثابت ہوں گے۔ اگر کوئی شخص سیلاب کے دوران لاپتہ ہو جاتا ہے، مثال کے طور پر، روبوٹ ممکنہ طور پر پانی کو زیادہ مؤثر طریقے سے عبور کر سکتا ہے کیونکہ اسے SotftZoo پلیٹ فارم میں دکھائے گئے طریقوں کا استعمال کرتے ہوئے بہتر بنایا گیا تھا۔
"SoftZoo نرم روبوٹ ڈیزائنرز کے لیے اوپن سورس سمولیشن فراہم کرتا ہے، جو کہ متنوع ماحول میں مشینوں کی نقل و حرکت کی صلاحیتوں کو تیز کرتے ہوئے حقیقی دنیا کے روبوٹ کو زیادہ آسانی اور لچکدار طریقے سے بنانے میں ان کی مدد کرتا ہے،" مطالعہ کے شریک مصنف چوانگ گان، ایم آئی ٹی کے ایک تحقیقی سائنسدان کہتے ہیں۔ -IBM Watson AI Lab جو جلد ہی Amherst کی یونیورسٹی آف میساچوسٹس میں اسسٹنٹ پروفیسر ہوں گے۔
"نرم روبوٹ جسموں اور ان کے دماغوں (یعنی ان کے کنٹرولرز) کو مشترکہ ڈیزائن کرنے کے لئے یہ کمپیوٹیشنل نقطہ نظر تیزی سے اپنی مرضی کے مطابق مشینیں بنانے کا دروازہ کھولتا ہے جو ایک مخصوص کام کے لئے ڈیزائن کی گئی ہیں،" ڈینییلا روس، CSAIL کے ڈائریکٹر اور اینڈریو اور مزید کہتے ہیں۔ ایرنا ویٹربی ایم آئی ٹی ڈیپارٹمنٹ آف الیکٹریکل انجینئرنگ اینڈ کمپیوٹر سائنس (EECS) میں پروفیسر ہیں، جو اس کام کے ایک اور مصنف ہیں۔
کسی بھی قسم کے روبوٹ کی تعمیر سے پہلے، فریم ورک غیر فطری مناظر کی فیلڈ ٹیسٹنگ کا متبادل ہو سکتا ہے۔ مثال کے طور پر، یہ اندازہ لگانا کہ ریچھ جیسا روبوٹ صحرا میں کیسے برتاؤ کرتا ہے، بوسٹن کے شہری میدانی علاقوں میں کام کرنے والی تحقیقی ٹیم کے لیے مشکل ہو سکتا ہے۔ اس کے بجائے، نرم روبوٹکس انجینئرز SoftZoo میں 3-D ماڈلز کا استعمال مختلف ڈیزائنوں کی تقلید کے لیے کر سکتے ہیں اور اندازہ لگا سکتے ہیں کہ ان کے روبوٹ کو کنٹرول کرنے والے الگورتھم نیویگیشن میں کتنے موثر ہیں۔ اس کے نتیجے میں، یہ محققین کے وقت اور وسائل کی بچت کرے گا۔
پھر بھی، موجودہ من گھڑت تکنیکوں کی حدود ان نرم روبوٹ ڈیزائنوں کو زندہ کرنے کی راہ میں حائل ہیں۔ وانگ کا کہنا ہے کہ "تقلید سے جسمانی روبوٹ میں منتقلی ابھی تک حل طلب نہیں ہے اور اس کے لیے مزید مطالعہ کی ضرورت ہے۔" "SoftZoo میں پٹھوں کے ماڈل، مقامی طور پر مختلف سختی، اور سینسرائزیشن کو موجودہ من گھڑت تکنیکوں کے ساتھ براہ راست محسوس نہیں کیا جا سکتا، لہذا ہم ان چیلنجوں پر کام کر رہے ہیں۔" مستقبل میں، پلیٹ فارم کے ڈیزائنرز روبوٹک کنٹرول کو جانچنے کی صلاحیت کے پیش نظر انسانی میکانکس، جیسے ہیرا پھیری میں ایپلی کیشنز پر نظر رکھے ہوئے ہیں۔ اس صلاحیت کو ظاہر کرنے کے لیے، وانگ کی ٹیم نے ایک 3-D بازو ڈیزائن کیا جس میں سنو بال کو آگے پھینکا گیا۔
محققین نے نرم روبوٹ کو-ڈیزائن کے لیے ایک نظام تیار کیا، جس کا مطلب ہے مشترکہ طور پر روبوٹ ڈیزائن کے لیے تلاش کرنا اور اسے بہتر بنانا — روبوٹ کی شکل، روبوٹ کے جسم میں پٹھوں کو کہاں رکھنا ہے، جسم کے مختلف علاقوں میں روبوٹ کتنا نرم ہے۔ اور روبوٹ ڈیزائن کی بنیاد پر، ہدف کے کام کو حاصل کرنے کے لیے اسے کنٹرول کرنے کا طریقہ۔ (تصویر: Alex Shipps/MIT CSAIL اور محققین) جنگلی کنارے پر چہل قدمی کرتے ہوئے، پلیٹ فارم میں پانڈا ریچھ، مچھلیاں، شارک اور کیٹرپلر جیسے جانوروں کے 3-D ماڈلز کو ڈیزائن کے طور پر پیش کیا گیا ہے جو کہ لوکوموشن جیسے نرم روبوٹکس کے کاموں کی تقلید کر سکتے ہیں۔ , چست موڑ، اور مختلف ماحول میں راستے کی پیروی کرنا۔ چاہے برف، صحرا، مٹی، یا پانی کے ذریعے، پلیٹ فارم مختلف علاقوں میں مختلف ڈیزائنوں کی کارکردگی کا مظاہرہ کرتا ہے۔
"ہمارا فریم ورک صارفین کو روبوٹ کی شکل کے لیے بہترین ترتیب تلاش کرنے میں مدد کر سکتا ہے، جس سے وہ نرم روبوٹکس الگورتھم ڈیزائن کر سکتے ہیں جو بہت سے مختلف کام کر سکتے ہیں،" ایم آئی ٹی پی ایچ ڈی کے طالب علم سون-ہسوان وانگ کہتے ہیں، جو کمپیوٹر سائنس اور مصنوعی ذہانت کی لیبارٹری سے وابستہ ہیں۔ CSAIL) جو اس پراجیکٹ کا ایک اہم محقق ہے۔ "مختصر طور پر، یہ ہمیں روبوٹ کے ماحول کے ساتھ تعامل کرنے کی بہترین حکمت عملیوں کو سمجھنے میں مدد کرتا ہے۔" SoftZoo ملتے جلتے پلیٹ فارمز کے مقابلے میں زیادہ جامع ہے، جو پہلے سے ہی ڈیزائن اور کنٹرول کی نقل کرتا ہے، کیونکہ یہ نقل و حرکت کا نمونہ بناتا ہے جو مختلف بائیومز کی جسمانی خصوصیات پر رد عمل ظاہر کرتا ہے۔ فریم ورک کی استعداد ایک متفرق ملٹی فزکس انجن سے آتی ہے، جو ایک ہی وقت میں ایک جسمانی نظام کے کئی پہلوؤں کی نقالی کی اجازت دیتا ہے، جیسے کہ بچے کی مہر کا برف پر پھیرنا یا گیلے زمین کے ماحول میں کیٹرپلر کا انچنا۔ انجن کی تفریق کمپیوٹیشنل کنٹرول اور ڈیزائن کے مسائل کو حل کرنے کے لیے درکار اکثر مہنگے سمولیشنز کی تعداد کو کم کرکے شریک ڈیزائن کو بہتر بناتی ہے۔ نتیجے کے طور پر، صارف زیادہ نفیس، مخصوص الگورتھم کے ساتھ نرم روبوٹس کو ڈیزائن اور منتقل کر سکتے ہیں۔
نظام کی مختلف خطوں کے ساتھ تعاملات کی نقالی کرنے کی صلاحیت مورفولوجی کی اہمیت کو واضح کرتی ہے، حیاتیات کی ایک شاخ جو مختلف جانداروں کی شکلوں، سائزوں اور شکلوں کا مطالعہ کرتی ہے۔ ماحول پر منحصر ہے، کچھ حیاتیاتی ڈھانچے دوسروں کے مقابلے میں زیادہ بہتر ہوتے ہیں، جیسا کہ مشینوں کے بلیو پرنٹس کا موازنہ کرنا جو اسی طرح کے کام مکمل کرتی ہیں۔
یہ حیاتیاتی خاکہ زیادہ مخصوص، خطوں سے متعلق مصنوعی زندگی کی ترغیب دے سکتا ہے۔ وانگ کا کہنا ہے کہ "جیلی فش کی نرمی سے غیر منقسم جیومیٹری اسے پانی کے بڑے ذخائر میں مؤثر طریقے سے سفر کرنے کی اجازت دیتی ہے، محققین کو نرم روبوٹس کی نئی نسلیں تیار کرنے اور سلیکو میں مکمل طور پر کاشت کی جانے والی مصنوعی مخلوقات کے لامحدود امکانات کو کھولنے کی ترغیب دیتی ہے،" وانگ کہتے ہیں۔ "اس کے علاوہ، ڈریگن فلائیز بہت چست چالیں انجام دے سکتی ہیں جو دوسری اڑن مخلوق مکمل نہیں کر سکتیں کیونکہ ان کے پروں پر خاص ڈھانچے ہوتے ہیں جو اڑتے وقت اپنے مرکز کو تبدیل کر دیتے ہیں۔ ہمارا پلیٹ فارم لوکوموشن کو اسی طرح بہتر بناتا ہے جس طرح ایک ڈریگن فلائی قدرتی طور پر اپنے گردونواح میں کام کرنے میں زیادہ ماہر ہوتی ہے۔ روبوٹ پہلے بے ترتیبی کے ماحول سے گزرنے کے لیے جدوجہد کرتے تھے کیونکہ ان کے جسم اپنے اردگرد کے ماحول کے مطابق نہیں تھے۔ SoftZoo کے ساتھ، اگرچہ، ڈیزائنرز روبوٹ کے دماغ اور جسم کو بیک وقت تیار کر سکتے ہیں، اور زمینی اور آبی دونوں مشینوں کو زیادہ باخبر اور مہارت حاصل کرنے کے لیے آپٹمائز کر سکتے ہیں۔ بڑھتے ہوئے طرز عمل اور مورفولوجیکل انٹیلی جنس کے ساتھ، روبوٹ ریسکیو مشن کو مکمل کرنے اور ریسرچ کرنے میں زیادہ کارآمد ثابت ہوں گے۔ اگر کوئی شخص سیلاب کے دوران لاپتہ ہو جاتا ہے، مثال کے طور پر، روبوٹ ممکنہ طور پر پانی کو زیادہ مؤثر طریقے سے عبور کر سکتا ہے کیونکہ اسے SotftZoo پلیٹ فارم میں دکھائے گئے طریقوں کا استعمال کرتے ہوئے بہتر بنایا گیا تھا۔
"SoftZoo نرم روبوٹ ڈیزائنرز کے لیے اوپن سورس سمولیشن فراہم کرتا ہے، جو کہ متنوع ماحول میں مشینوں کی نقل و حرکت کی صلاحیتوں کو تیز کرتے ہوئے حقیقی دنیا کے روبوٹ کو زیادہ آسانی اور لچکدار طریقے سے بنانے میں ان کی مدد کرتا ہے،" مطالعہ کے شریک مصنف چوانگ گان، ایم آئی ٹی کے ایک تحقیقی سائنسدان کہتے ہیں۔ -IBM Watson AI Lab جو جلد ہی Amherst کی یونیورسٹی آف میساچوسٹس میں اسسٹنٹ پروفیسر ہوں گے۔
"نرم روبوٹ جسموں اور ان کے دماغوں (یعنی ان کے کنٹرولرز) کو مشترکہ ڈیزائن کرنے کے لئے یہ کمپیوٹیشنل نقطہ نظر تیزی سے اپنی مرضی کے مطابق مشینیں بنانے کا دروازہ کھولتا ہے جو ایک مخصوص کام کے لئے ڈیزائن کی گئی ہیں،" ڈینییلا روس، CSAIL کے ڈائریکٹر اور اینڈریو اور مزید کہتے ہیں۔ ایرنا ویٹربی ایم آئی ٹی ڈیپارٹمنٹ آف الیکٹریکل انجینئرنگ اینڈ کمپیوٹر سائنس (EECS) میں پروفیسر ہیں، جو اس کام کے ایک اور مصنف ہیں۔
کسی بھی قسم کے روبوٹ کی تعمیر سے پہلے، فریم ورک غیر فطری مناظر کی فیلڈ ٹیسٹنگ کا متبادل ہو سکتا ہے۔ مثال کے طور پر، یہ اندازہ لگانا کہ ریچھ جیسا روبوٹ صحرا میں کیسے برتاؤ کرتا ہے، بوسٹن کے شہری میدانی علاقوں میں کام کرنے والی تحقیقی ٹیم کے لیے مشکل ہو سکتا ہے۔ اس کے بجائے، نرم روبوٹکس انجینئرز SoftZoo میں 3-D ماڈلز کا استعمال مختلف ڈیزائنوں کی تقلید کے لیے کر سکتے ہیں اور اندازہ لگا سکتے ہیں کہ ان کے روبوٹ کو کنٹرول کرنے والے الگورتھم نیویگیشن میں کتنے موثر ہیں۔ اس کے نتیجے میں، یہ محققین کے وقت اور وسائل کی بچت کرے گا۔
پھر بھی، موجودہ من گھڑت تکنیکوں کی حدود ان نرم روبوٹ ڈیزائنوں کو زندہ کرنے کی راہ میں حائل ہیں۔ وانگ کا کہنا ہے کہ "تقلید سے جسمانی روبوٹ میں منتقلی ابھی تک حل طلب نہیں ہے اور اس کے لیے مزید مطالعہ کی ضرورت ہے۔" "SoftZoo میں پٹھوں کے ماڈل، مقامی طور پر مختلف سختی، اور سینسرائزیشن کو موجودہ من گھڑت تکنیکوں کے ساتھ براہ راست محسوس نہیں کیا جا سکتا، لہذا ہم ان چیلنجوں پر کام کر رہے ہیں۔" مستقبل میں، پلیٹ فارم کے ڈیزائنرز روبوٹک کنٹرول کو جانچنے کی صلاحیت کے پیش نظر انسانی میکانکس، جیسے ہیرا پھیری میں ایپلی کیشنز پر نظر رکھے ہوئے ہیں۔ اس صلاحیت کو ظاہر کرنے کے لیے، وانگ کی ٹیم نے ایک 3-D بازو ڈیزائن کیا جس میں سنو بال کو آگے پھینکا گیا۔
محققین نے نرم روبوٹ کو-ڈیزائن کے لیے ایک نظام تیار کیا، جس کا مطلب ہے مشترکہ طور پر روبوٹ ڈیزائن کے لیے تلاش کرنا اور اسے بہتر بنانا — روبوٹ کی شکل، روبوٹ کے جسم میں پٹھوں کو کہاں رکھنا ہے، جسم کے مختلف علاقوں میں روبوٹ کتنا نرم ہے۔ اور روبوٹ ڈیزائن کی بنیاد پر، ہدف کے کام کو حاصل کرنے کے لیے اسے کنٹرول کرنے کا طریقہ۔ (تصویر: Alex Shipps/MIT CSAIL اور محققین) جنگلی کنارے پر چہل قدمی کرتے ہوئے، پلیٹ فارم میں پانڈا ریچھ، مچھلیاں، شارک اور کیٹرپلر جیسے جانوروں کے 3-D ماڈلز کو ڈیزائن کے طور پر پیش کیا گیا ہے جو کہ لوکوموشن جیسے نرم روبوٹکس کے کاموں کی تقلید کر سکتے ہیں۔ , چست موڑ، اور مختلف ماحول میں راستے کی پیروی کرنا۔ چاہے برف، صحرا، مٹی، یا پانی کے ذریعے، پلیٹ فارم مختلف علاقوں میں مختلف ڈیزائنوں کی کارکردگی کا مظاہرہ کرتا ہے۔
"ہمارا فریم ورک صارفین کو روبوٹ کی شکل کے لیے بہترین ترتیب تلاش کرنے میں مدد کر سکتا ہے، جس سے وہ نرم روبوٹکس الگورتھم ڈیزائن کر سکتے ہیں جو بہت سے مختلف کام کر سکتے ہیں،" ایم آئی ٹی پی ایچ ڈی کے طالب علم سون-ہسوان وانگ کہتے ہیں، جو کمپیوٹر سائنس اور مصنوعی ذہانت کی لیبارٹری سے وابستہ ہیں۔ CSAIL) جو اس پراجیکٹ کا ایک اہم محقق ہے۔ "مختصر طور پر، یہ ہمیں روبوٹ کے ماحول کے ساتھ تعامل کرنے کی بہترین حکمت عملیوں کو سمجھنے میں مدد کرتا ہے۔" SoftZoo ملتے جلتے پلیٹ فارمز کے مقابلے میں زیادہ جامع ہے، جو پہلے سے ہی ڈیزائن اور کنٹرول کی نقل کرتا ہے، کیونکہ یہ نقل و حرکت کا نمونہ بناتا ہے جو مختلف بائیومز کی جسمانی خصوصیات پر رد عمل ظاہر کرتا ہے۔ فریم ورک کی استعداد ایک متفرق ملٹی فزکس انجن سے آتی ہے، جو ایک ہی وقت میں ایک جسمانی نظام کے کئی پہلوؤں کی نقالی کی اجازت دیتا ہے، جیسے کہ بچے کی مہر کا برف پر پھیرنا یا گیلے زمین کے ماحول میں کیٹرپلر کا انچنا۔ انجن کی تفریق کمپیوٹیشنل کنٹرول اور ڈیزائن کے مسائل کو حل کرنے کے لیے درکار اکثر مہنگے سمولیشنز کی تعداد کو کم کرکے شریک ڈیزائن کو بہتر بناتی ہے۔ نتیجے کے طور پر، صارف زیادہ نفیس، مخصوص الگورتھم کے ساتھ نرم روبوٹس کو ڈیزائن اور منتقل کر سکتے ہیں۔
نظام کی مختلف خطوں کے ساتھ تعاملات کی نقالی کرنے کی صلاحیت مورفولوجی کی اہمیت کو واضح کرتی ہے، حیاتیات کی ایک شاخ جو مختلف جانداروں کی شکلوں، سائزوں اور شکلوں کا مطالعہ کرتی ہے۔ ماحول پر منحصر ہے، کچھ حیاتیاتی ڈھانچے دوسروں کے مقابلے میں زیادہ بہتر ہوتے ہیں، جیسا کہ مشینوں کے بلیو پرنٹس کا موازنہ کرنا جو اسی طرح کے کام مکمل کرتی ہیں۔
یہ حیاتیاتی خاکہ زیادہ مخصوص، خطوں سے متعلق مصنوعی زندگی کی ترغیب دے سکتا ہے۔ وانگ کا کہنا ہے کہ "جیلی فش کی نرمی سے غیر منقسم جیومیٹری اسے پانی کے بڑے ذخائر میں مؤثر طریقے سے سفر کرنے کی اجازت دیتی ہے، محققین کو نرم روبوٹس کی نئی نسلیں تیار کرنے اور سلیکو میں مکمل طور پر کاشت کی جانے والی مصنوعی مخلوقات کے لامحدود امکانات کو کھولنے کی ترغیب دیتی ہے،" وانگ کہتے ہیں۔ "اس کے علاوہ، ڈریگن فلائیز بہت چست چالیں انجام دے سکتی ہیں جو دوسری اڑن مخلوق مکمل نہیں کر سکتیں کیونکہ ان کے پروں پر خاص ڈھانچے ہوتے ہیں جو اڑتے وقت اپنے مرکز کو تبدیل کر دیتے ہیں۔ ہمارا پلیٹ فارم لوکوموشن کو اسی طرح بہتر بناتا ہے جس طرح ایک ڈریگن فلائی قدرتی طور پر اپنے گردونواح میں کام کرنے میں زیادہ ماہر ہوتی ہے۔ روبوٹ پہلے بے ترتیبی کے ماحول سے گزرنے کے لیے جدوجہد کرتے تھے کیونکہ ان کے جسم اپنے اردگرد کے ماحول کے مطابق نہیں تھے۔ SoftZoo کے ساتھ، اگرچہ، ڈیزائنرز روبوٹ کے دماغ اور جسم کو بیک وقت تیار کر سکتے ہیں، اور زمینی اور آبی دونوں مشینوں کو زیادہ باخبر اور مہارت حاصل کرنے کے لیے آپٹمائز کر سکتے ہیں۔ بڑھتے ہوئے طرز عمل اور مورفولوجیکل انٹیلی جنس کے ساتھ، روبوٹ ریسکیو مشن کو مکمل کرنے اور ریسرچ کرنے میں زیادہ کارآمد ثابت ہوں گے۔ اگر کوئی شخص سیلاب کے دوران لاپتہ ہو جاتا ہے، مثال کے طور پر، روبوٹ ممکنہ طور پر پانی کو زیادہ مؤثر طریقے سے عبور کر سکتا ہے کیونکہ اسے SotftZoo پلیٹ فارم میں دکھائے گئے طریقوں کا استعمال کرتے ہوئے بہتر بنایا گیا تھا۔
"SoftZoo نرم روبوٹ ڈیزائنرز کے لیے اوپن سورس سمولیشن فراہم کرتا ہے، جو کہ متنوع ماحول میں مشینوں کی نقل و حرکت کی صلاحیتوں کو تیز کرتے ہوئے حقیقی دنیا کے روبوٹ کو زیادہ آسانی اور لچکدار طریقے سے بنانے میں ان کی مدد کرتا ہے،" مطالعہ کے شریک مصنف چوانگ گان، ایم آئی ٹی کے ایک تحقیقی سائنسدان کہتے ہیں۔ -IBM Watson AI Lab جو جلد ہی Amherst کی یونیورسٹی آف میساچوسٹس میں اسسٹنٹ پروفیسر ہوں گے۔
"نرم روبوٹ جسموں اور ان کے دماغوں (یعنی ان کے کنٹرولرز) کو مشترکہ ڈیزائن کرنے کے لئے یہ کمپیوٹیشنل نقطہ نظر تیزی سے اپنی مرضی کے مطابق مشینیں بنانے کا دروازہ کھولتا ہے جو ایک مخصوص کام کے لئے ڈیزائن کی گئی ہیں،" ڈینییلا روس، CSAIL کے ڈائریکٹر اور اینڈریو اور مزید کہتے ہیں۔ ایرنا ویٹربی ایم آئی ٹی ڈیپارٹمنٹ آف الیکٹریکل انجینئرنگ اینڈ کمپیوٹر سائنس (EECS) میں پروفیسر ہیں، جو اس کام کے ایک اور مصنف ہیں۔
کسی بھی قسم کے روبوٹ کی تعمیر سے پہلے، فریم ورک غیر فطری مناظر کی فیلڈ ٹیسٹنگ کا متبادل ہو سکتا ہے۔ مثال کے طور پر، یہ اندازہ لگانا کہ ریچھ جیسا روبوٹ صحرا میں کیسے برتاؤ کرتا ہے، بوسٹن کے شہری میدانی علاقوں میں کام کرنے والی تحقیقی ٹیم کے لیے مشکل ہو سکتا ہے۔ اس کے بجائے، نرم روبوٹکس انجینئرز SoftZoo میں 3-D ماڈلز کا استعمال مختلف ڈیزائنوں کی تقلید کے لیے کر سکتے ہیں اور اندازہ لگا سکتے ہیں کہ ان کے روبوٹ کو کنٹرول کرنے والے الگورتھم نیویگیشن میں کتنے موثر ہیں۔ اس کے نتیجے میں، یہ محققین کے وقت اور وسائل کی بچت کرے گا۔
پھر بھی، موجودہ من گھڑت تکنیکوں کی حدود ان نرم روبوٹ ڈیزائنوں کو زندہ کرنے کی راہ میں حائل ہیں۔ وانگ کا کہنا ہے کہ "تقلید سے جسمانی روبوٹ میں منتقلی ابھی تک حل طلب نہیں ہے اور اس کے لیے مزید مطالعہ کی ضرورت ہے۔" "SoftZoo میں پٹھوں کے ماڈل، مقامی طور پر مختلف سختی، اور سینسرائزیشن کو موجودہ من گھڑت تکنیکوں کے ساتھ براہ راست محسوس نہیں کیا جا سکتا، لہذا ہم ان چیلنجوں پر کام کر رہے ہیں۔" مستقبل میں، پلیٹ فارم کے ڈیزائنرز روبوٹک کنٹرول کو جانچنے کی صلاحیت کے پیش نظر انسانی میکانکس، جیسے ہیرا پھیری میں ایپلی کیشنز پر نظر رکھے ہوئے ہیں۔ اس صلاحیت کو ظاہر کرنے کے لیے، وانگ کی ٹیم نے ایک 3-D بازو ڈیزائن کیا جس میں سنو بال کو آگے پھینکا گیا۔
- SEO سے چلنے والا مواد اور PR کی تقسیم۔ آج ہی بڑھا دیں۔
- پلیٹوآئ اسٹریم۔ ویب 3 ڈیٹا انٹیلی جنس۔ علم میں اضافہ۔ یہاں تک رسائی حاصل کریں۔
- ایڈریین ایشلے کے ساتھ مستقبل کا نقشہ بنانا۔ یہاں تک رسائی حاصل کریں۔
- ماخذ: https://www.nanowerk.com/news2/robotics/newsid=62936.php
- : ہے
- : ہے
- : نہیں
- :کہاں
- $UP
- 10
- 11
- 12
- 8
- 9
- a
- کی صلاحیت
- تیز
- حاصل
- کے پار
- جوڑتا ہے
- اپنایا
- ملحق
- فرتیلی
- AI
- یلیکس
- یلگوردمز
- اجازت دے رہا ہے
- کی اجازت دیتا ہے
- پہلے ہی
- an
- اور
- اینڈریو
- جانوروں
- ایک اور
- کوئی بھی
- ایپلی کیشنز
- نقطہ نظر
- کیا
- بازو
- ہتھیار
- مصنوعی
- مصنوعی ذہانت
- AS
- پہلوؤں
- اندازہ
- اسسٹنٹ
- At
- مصنف
- خود کار طریقے سے
- بچے
- کی بنیاد پر
- BE
- ریچھ
- کیونکہ
- رہا
- اس سے پہلے
- BEST
- حیاتیات
- جسم
- بوسٹن
- دونوں
- دماغ
- دماغ
- برانچ
- آ رہا ہے
- تعمیر
- عمارت
- by
- کر سکتے ہیں
- نہیں کر سکتے ہیں
- صلاحیتوں
- صلاحیت رکھتا
- سینٹر
- چیلنجوں
- چیلنج
- تبدیل
- شریک مصنف۔
- آتا ہے
- موازنہ
- مکمل
- مکمل کرنا
- شکایت
- وسیع
- کمپیوٹر
- کمپیوٹر سائنس
- چل رہا ہے
- ترتیب
- کنٹرول
- کنٹرولنگ
- سکتا ہے
- تخلیق
- CSAIL
- موجودہ
- اپنی مرضی کے مطابق
- تاریخ
- مظاہرہ
- demonstrated,en
- ثبوت
- شعبہ
- منحصر ہے
- DESERT
- ڈیزائن
- ڈیزائن
- ڈیزائنرز
- ڈیزائن
- یہ تعین
- ترقی
- ترقی یافتہ
- ترقی
- مختلف
- ڈائریکٹر
- متنوع
- do
- دروازے
- ڈریگن فلائز
- Dragonfly میں
- کے دوران
- آسانی سے
- موثر
- مؤثر طریقے سے
- برقی انجینرنگ
- کے قابل بناتا ہے
- انجن
- انجنیئرنگ
- انجینئرز
- مکمل
- ماحولیات
- ماحول
- جوہر
- اندازہ
- بھی
- مثال کے طور پر
- مہنگی
- کی تلاش
- خصوصیات
- میدان
- مل
- لچکدار
- سیلاب
- پرواز
- کے بعد
- کے لئے
- فارم
- آگے
- فریم ورک
- سے
- مزید
- مستقبل
- پیدا
- ستادوستی
- دی
- سمجھو
- ہے
- مدد
- مدد
- مدد کرتا ہے
- کس طرح
- HTTPS
- انسانی
- ICE
- if
- وضاحت کرتا ہے
- تصویر
- اہمیت
- کو بہتر بنانے کے
- in
- سمیت
- اضافہ
- پریرتا
- حوصلہ افزائی
- متاثر کن
- کے بجائے
- انٹیلی جنس
- بات چیت
- بات چیت
- IT
- میں
- فوٹو
- لیب
- تجربہ گاہیں
- بڑے
- قیادت
- زندگی
- کی طرح
- حدود
- دیکھو
- کی طرح دیکھو
- مشینیں
- ہیرا پھیری
- بہت سے
- ماس
- میسا چوسٹس
- مئی..
- کا مطلب ہے کہ
- میکینکس
- طریقوں
- مشرق
- لاپتہ
- مشن
- ایم ائی ٹی
- ماڈل
- زیادہ
- تحریک
- منتقل
- تحریک
- بہت
- تشریف لے جائیں
- سمت شناسی
- نئی
- تعداد
- اشیاء
- of
- اکثر
- on
- ایک
- اوپن سورس
- کھولنے
- کھولتا ہے
- زیادہ سے زیادہ
- اصلاح
- اصلاح کرتا ہے
- اصلاح
- or
- دیگر
- دیگر
- ہمارے
- خطوط
- راستہ
- انجام دینے کے
- کارکردگی
- انسان
- جسمانی
- پلیٹ فارم
- پلیٹ فارم
- پلاٹا
- افلاطون ڈیٹا انٹیلی جنس
- پلیٹو ڈیٹا
- امکانات
- ممکنہ
- ممکنہ طور پر
- پہلے
- مسائل
- ٹیچر
- منصوبے
- فراہم کرتا ہے
- ڈال
- میں تیزی سے
- ردعمل
- حقیقی دنیا
- احساس ہوا
- کو کم کرنے
- خطوں
- بازآبادکاری
- باقی
- ضرورت
- کی ضرورت ہے
- بچانے
- تحقیق
- محقق
- محققین
- وسائل
- نتیجہ
- میں روبوٹ
- روبوٹکس
- روبوٹس
- اسی
- محفوظ کریں
- کا کہنا ہے کہ
- مناظر
- سائنس
- سائنسدان
- تلاش
- کئی
- شکل
- سائز
- شارک
- کی طرف
- اسی طرح
- تخروپن
- بیک وقت
- بعد
- سائز
- برف
- So
- سافٹ
- حل
- کچھ
- اسی طرح
- بہتر
- ماخذ
- خلا
- خصوصی
- خصوصی
- مخصوص
- مخصوص
- ڈھیر لگانا
- کھڑے ہیں
- مرحلہ
- ابھی تک
- حکمت عملیوں
- طالب علم
- مطالعہ
- مطالعہ
- اس طرح
- کے نظام
- لینے
- ہدف
- ٹاسک
- کاموں
- ٹیم
- تکنیک
- طوفان
- ٹیسٹ
- ٹیسٹنگ
- سے
- کہ
- ۔
- مستقبل
- ان
- ان
- تو
- یہ
- وہ
- چیزیں
- اس
- اگرچہ؟
- کے ذریعے
- پھینک دو
- وقت
- کرنے کے لئے
- سفر
- ٹرن
- ٹرننگ
- قسم
- سمجھ
- یونیورسٹی
- لا محدود
- شہری
- us
- استعمال کی شرائط
- صارفین
- کا استعمال کرتے ہوئے
- مختلف
- بہت
- تھا
- پانی
- واٹرس
- واٹسن
- راستہ..
- we
- تھے
- کیا
- جب
- چاہے
- جس
- جبکہ
- ڈبلیو
- وائلڈ
- جنگلی حیات
- گے
- ساتھ
- کام
- کام کر
- گا
- زیفیرنیٹ
سے زیادہ نانوورک

سائنسدانوں نے اتپریرک کے طور پر استعمال کے لئے دھاتی نینو پارٹیکلز پیدا کرنے کا ایک نیا طریقہ دریافت کیا۔
ماخذ نوڈ: 3039388
ٹائم اسٹیمپ: دسمبر 28، 2023

AI اور CRISPR عین مطابق جین کے اظہار کو کنٹرول کرتے ہیں۔
ماخذ نوڈ: 2747420
ٹائم اسٹیمپ: جولائی 3، 2023
بہتر کارکردگی کے ساتھ سلیکون ڈیوائسز کے ڈیزائن کی رہنمائی کرنا
ماخذ نوڈ: 2839986
ٹائم اسٹیمپ: اگست 23، 2023
روبوٹک مکھیاں اور جڑیں صحت مند ماحول اور کافی خوراک کی امید پیش کرتی ہیں۔
ماخذ نوڈ: 1977685
ٹائم اسٹیمپ: فروری 25، 2023

نینو سائز کا کاربن مواد ڈاؤن سنڈروم کے علاج کے لیے استعمال کیا جا سکتا ہے۔
ماخذ نوڈ: 2778869
ٹائم اسٹیمپ: جولائی 21، 2023
OLED TVs کے لیے بنیادی مواد سے تخلیق کردہ ایک نیورومورفک synapse
ماخذ نوڈ: 2541090
ٹائم اسٹیمپ: مارچ 24، 2023

'ملٹی لیمنٹ انک' کے ساتھ پائیدار سیمی کنڈکٹرز کو تیز کرنا
ماخذ نوڈ: 2911790
ٹائم اسٹیمپ: ستمبر 28، 2023
سورج کی روشنی کا استعمال کرتے ہوئے ہائیڈروجن بنانے کے لیے روشنی سے چلنے والا نانوکاٹیلیسٹ
ماخذ نوڈ: 3053672
ٹائم اسٹیمپ: جنوری 10، 2024
سائنس دان نینو میٹر پیمانے پر افراتفری کے رویے میں تبدیلی کا مشاہدہ کرتے ہیں۔
ماخذ نوڈ: 1982382
ٹائم اسٹیمپ: فروری 27، 2023

روبوٹس اور اے آئی کی ٹیم انتہائی منتخب اتپریرک دریافت کرنے کے لیے تیار ہے۔
ماخذ نوڈ: 1940293
ٹائم اسٹیمپ: فروری 3، 2023