04 اپریل 2023 (نانورک نیوز) روبوٹسٹس پتلی، لچکدار چادروں سے خود مختار مشینیں تیار کرنے کے لیے کاغذ تہہ کرنے کے قدیم فن سے ملتی جلتی تکنیک استعمال کر رہے ہیں۔ یہ ہلکے وزن والے روبوٹ بنانے میں آسان اور سستے ہیں اور آسان اسٹوریج اور ٹرانسپورٹ کے لیے زیادہ کمپیکٹ ہیں۔ تاہم، سخت کمپیوٹر چپس کو روایتی طور پر روبوٹ کی اعلیٰ صلاحیتوں کو فعال کرنے کے لیے درکار ہوتا ہے — سینسنگ، تجزیہ اور ماحول کا جواب دینا — پتلی شیٹ کے مواد میں اضافی وزن ڈالتے ہیں اور انہیں فولڈ کرنا مشکل بنا دیتے ہیں۔ سیمی کنڈکٹر پر مبنی اجزاء کو روبوٹ کی حتمی شکل لینے کے بعد شامل کرنا ہوگا۔ اب، UCLA سیموئیلی سکول آف انجینئرنگ کے محققین کی قیادت میں ایک کثیر الضابطہ ٹیم نے مکمل طور پر فولڈ ایبل روبوٹس کے لیے ایک نئی من گھڑت تکنیک بنائی ہے جو سیمی کنڈکٹرز پر انحصار کیے بغیر مختلف قسم کے پیچیدہ کام انجام دے سکتی ہے۔ تحقیقی نتائج کی تفصیل کے ساتھ ایک مطالعہ شائع ہوا تھا۔ فطرت، قدرت مواصلات ("روبوٹس کا اوریگامی پر مبنی انضمام جو احساس، فیصلہ اور جواب دیتا ہے").
 ایک اوریگامی سے متاثر روبوٹ جسے UCLA کی زیرقیادت ٹیم نے ڈیزائن کیا ہے جو اپنے اینٹینا میں سے کسی کو رکاوٹ محسوس کرنے پر سمت کو الٹ سکتا ہے۔ (Wenzhong Yan, UCLA) لچکدار اور برقی طور پر ترسیلی مواد کو ایک پری کٹ، پتلی پالئیےسٹر فلم شیٹ میں سرایت کر کے، محققین نے انفارمیشن پروسیسنگ یونٹس، یا ٹرانزسٹرز کا ایک نظام بنایا، جسے سینسر اور ایکچیوٹرز کے ساتھ مربوط کیا جا سکتا ہے۔ اس کے بعد انہوں نے شیٹ کو سادہ کمپیوٹر کے مطابق افعال کے ساتھ پروگرام کیا جو سیمی کنڈکٹرز کی تقلید کرتے ہیں۔ ایک بار کاٹ، تہہ اور جمع ہونے کے بعد، شیٹ ایک خودمختار روبوٹ میں تبدیل ہو جاتی ہے جو اپنے ماحول کو درستگی کے ساتھ سمجھ، تجزیہ اور عمل کر سکتا ہے۔ محققین نے اپنے روبوٹ کا نام "اوریگا میکس" رکھا، اوریگامی میکانو بوٹس کے لیے مختصر۔ "یہ کام اوریگامی روبوٹس کی ایک نئی کلاس کی طرف لے جاتا ہے جس میں توسیعی صلاحیتوں اور خودمختاری کی سطح ہوتی ہے جبکہ اوریگامی فولڈنگ پر مبنی فیبریکیشن سے وابستہ سازگار صفات کو برقرار رکھا جاتا ہے،" مطالعہ کے لیڈ مصنف وینزونگ یان نے کہا، جو UCLA مکینیکل انجینئرنگ ڈاکٹریٹ کے طالب علم ہیں۔ OrigaMechs نے اپنی کمپیوٹنگ کی صلاحیتوں کو میکینیکل اوریگامی ملٹی پلیکس سوئچز کے مجموعے سے حاصل کیا جو فولڈز اور پروگرام شدہ بولین لاجک کمانڈز، جیسے "AND," "OR" اور "NOT" کے ذریعے بنائے گئے ہیں۔ سوئچز نے ایک میکانزم کو فعال کیا جو نظام میں متغیر دباؤ اور حرارت کے ان پٹ کی بنیاد پر برقی سگنلز کو منتخب طور پر آؤٹ پٹ کرتا ہے۔ نئے نقطہ نظر کا استعمال کرتے ہوئے، ٹیم نے نظام کی صلاحیت کو ظاہر کرنے کے لیے تین روبوٹ بنائے:
ایک اوریگامی سے متاثر روبوٹ جسے UCLA کی زیرقیادت ٹیم نے ڈیزائن کیا ہے جو اپنے اینٹینا میں سے کسی کو رکاوٹ محسوس کرنے پر سمت کو الٹ سکتا ہے۔ (Wenzhong Yan, UCLA) لچکدار اور برقی طور پر ترسیلی مواد کو ایک پری کٹ، پتلی پالئیےسٹر فلم شیٹ میں سرایت کر کے، محققین نے انفارمیشن پروسیسنگ یونٹس، یا ٹرانزسٹرز کا ایک نظام بنایا، جسے سینسر اور ایکچیوٹرز کے ساتھ مربوط کیا جا سکتا ہے۔ اس کے بعد انہوں نے شیٹ کو سادہ کمپیوٹر کے مطابق افعال کے ساتھ پروگرام کیا جو سیمی کنڈکٹرز کی تقلید کرتے ہیں۔ ایک بار کاٹ، تہہ اور جمع ہونے کے بعد، شیٹ ایک خودمختار روبوٹ میں تبدیل ہو جاتی ہے جو اپنے ماحول کو درستگی کے ساتھ سمجھ، تجزیہ اور عمل کر سکتا ہے۔ محققین نے اپنے روبوٹ کا نام "اوریگا میکس" رکھا، اوریگامی میکانو بوٹس کے لیے مختصر۔ "یہ کام اوریگامی روبوٹس کی ایک نئی کلاس کی طرف لے جاتا ہے جس میں توسیعی صلاحیتوں اور خودمختاری کی سطح ہوتی ہے جبکہ اوریگامی فولڈنگ پر مبنی فیبریکیشن سے وابستہ سازگار صفات کو برقرار رکھا جاتا ہے،" مطالعہ کے لیڈ مصنف وینزونگ یان نے کہا، جو UCLA مکینیکل انجینئرنگ ڈاکٹریٹ کے طالب علم ہیں۔ OrigaMechs نے اپنی کمپیوٹنگ کی صلاحیتوں کو میکینیکل اوریگامی ملٹی پلیکس سوئچز کے مجموعے سے حاصل کیا جو فولڈز اور پروگرام شدہ بولین لاجک کمانڈز، جیسے "AND," "OR" اور "NOT" کے ذریعے بنائے گئے ہیں۔ سوئچز نے ایک میکانزم کو فعال کیا جو نظام میں متغیر دباؤ اور حرارت کے ان پٹ کی بنیاد پر برقی سگنلز کو منتخب طور پر آؤٹ پٹ کرتا ہے۔ نئے نقطہ نظر کا استعمال کرتے ہوئے، ٹیم نے نظام کی صلاحیت کو ظاہر کرنے کے لیے تین روبوٹ بنائے:
ایک کیڑے کی طرح چلنے والا روبوٹ جو اپنے اینٹینا میں سے کسی کو رکاوٹ محسوس کرنے پر سمت کو الٹ دیتا ہے۔
وینس فلائی ٹریپ جیسا روبوٹ جو "شکار" کو لپیٹ لیتا ہے جب اس کے دونوں جبڑے کے سینسر کسی چیز کا پتہ لگاتے ہیں
ایک دوبارہ پروگرام کے قابل دو پہیوں والا روبوٹ جو مختلف جیومیٹرک پیٹرن کے پہلے سے ڈیزائن کردہ راستوں پر چل سکتا ہے
 وینس فلائی ٹریپ نما روبوٹ جو ایک "شکار" کو لپیٹ لیتا ہے جب اس کے دونوں جبڑے کے سینسر کسی چیز کا پتہ لگاتے ہیں۔ (تصویر: یو سی ایل اے) جب کہ روبوٹ کو مظاہرے کے لیے طاقت کے منبع سے جوڑا گیا تھا، محققین نے کہا کہ طویل مدتی مقصد خود مختار اوریگامی روبوٹس کو پتلی فلم لیتھیم بیٹریوں سے چلنے والے ایمبیڈڈ انرجی اسٹوریج سسٹم کے ساتھ تیار کرنا ہوگا۔ چپ سے پاک ڈیزائن انتہائی ماحول میں کام کرنے کے قابل روبوٹس کا باعث بن سکتا ہے — مضبوط ریڈی ایٹیو یا مقناطیسی فیلڈز، اور ایسی جگہیں جہاں شدید ریڈیو فریکوئنسی سگنلز یا ہائی الیکٹرو سٹیٹک ڈسچارجز — جہاں روایتی سیمی کنڈکٹر پر مبنی الیکٹرانکس کام کرنے میں ناکام ہو سکتے ہیں۔ "اس قسم کے خطرناک یا غیر متوقع منظرنامے، جیسے کہ قدرتی یا انسان ساختہ آفت کے دوران، جہاں اوریگامی روبوٹ خاص طور پر کارآمد ثابت ہو سکتے ہیں،" مطالعہ کے پرنسپل تفتیش کار انکور مہتا، الیکٹریکل اور کمپیوٹر انجینئرنگ کے اسسٹنٹ پروفیسر اور UCLA کی لیبارٹری کے ڈائریکٹر نے کہا۔ ایمبیڈڈ مشینوں اور ہر جگہ روبوٹ کے لیے۔ مہتا نے مزید کہا، "روبوٹس کو خاص کاموں کے لیے ڈیزائن کیا جا سکتا ہے اور بہت جلد مانگ کے مطابق تیار کیا جا سکتا ہے۔" "اس کے علاوہ، جب کہ یہ بہت دور ہے، دوسرے سیاروں پر ایسے ماحول ہوسکتے ہیں جہاں ایکسپلورر روبوٹ جو ان منظرناموں سے بے نیاز ہوں، بہت مطلوبہ ہوں گے۔" اس لچکدار کٹ اور فولڈ تکنیک کے ذریعہ تیار کردہ پہلے سے جمع روبوٹس کو بڑے پیمانے پر جگہ کی بچت کے لئے فلیٹ پیکیجنگ میں منتقل کیا جاسکتا ہے۔ یہ خلائی مشن جیسے منظرناموں میں اہم ہے، جہاں ہر کیوبک سینٹی میٹر شمار ہوتا ہے۔ کم لاگت، ہلکے وزن اور سادہ سے بناوٹ کے روبوٹ جدید تعلیمی آلات یا کھلونوں اور گیمز کی نئی اقسام کا باعث بھی بن سکتے ہیں۔
وینس فلائی ٹریپ نما روبوٹ جو ایک "شکار" کو لپیٹ لیتا ہے جب اس کے دونوں جبڑے کے سینسر کسی چیز کا پتہ لگاتے ہیں۔ (تصویر: یو سی ایل اے) جب کہ روبوٹ کو مظاہرے کے لیے طاقت کے منبع سے جوڑا گیا تھا، محققین نے کہا کہ طویل مدتی مقصد خود مختار اوریگامی روبوٹس کو پتلی فلم لیتھیم بیٹریوں سے چلنے والے ایمبیڈڈ انرجی اسٹوریج سسٹم کے ساتھ تیار کرنا ہوگا۔ چپ سے پاک ڈیزائن انتہائی ماحول میں کام کرنے کے قابل روبوٹس کا باعث بن سکتا ہے — مضبوط ریڈی ایٹیو یا مقناطیسی فیلڈز، اور ایسی جگہیں جہاں شدید ریڈیو فریکوئنسی سگنلز یا ہائی الیکٹرو سٹیٹک ڈسچارجز — جہاں روایتی سیمی کنڈکٹر پر مبنی الیکٹرانکس کام کرنے میں ناکام ہو سکتے ہیں۔ "اس قسم کے خطرناک یا غیر متوقع منظرنامے، جیسے کہ قدرتی یا انسان ساختہ آفت کے دوران، جہاں اوریگامی روبوٹ خاص طور پر کارآمد ثابت ہو سکتے ہیں،" مطالعہ کے پرنسپل تفتیش کار انکور مہتا، الیکٹریکل اور کمپیوٹر انجینئرنگ کے اسسٹنٹ پروفیسر اور UCLA کی لیبارٹری کے ڈائریکٹر نے کہا۔ ایمبیڈڈ مشینوں اور ہر جگہ روبوٹ کے لیے۔ مہتا نے مزید کہا، "روبوٹس کو خاص کاموں کے لیے ڈیزائن کیا جا سکتا ہے اور بہت جلد مانگ کے مطابق تیار کیا جا سکتا ہے۔" "اس کے علاوہ، جب کہ یہ بہت دور ہے، دوسرے سیاروں پر ایسے ماحول ہوسکتے ہیں جہاں ایکسپلورر روبوٹ جو ان منظرناموں سے بے نیاز ہوں، بہت مطلوبہ ہوں گے۔" اس لچکدار کٹ اور فولڈ تکنیک کے ذریعہ تیار کردہ پہلے سے جمع روبوٹس کو بڑے پیمانے پر جگہ کی بچت کے لئے فلیٹ پیکیجنگ میں منتقل کیا جاسکتا ہے۔ یہ خلائی مشن جیسے منظرناموں میں اہم ہے، جہاں ہر کیوبک سینٹی میٹر شمار ہوتا ہے۔ کم لاگت، ہلکے وزن اور سادہ سے بناوٹ کے روبوٹ جدید تعلیمی آلات یا کھلونوں اور گیمز کی نئی اقسام کا باعث بھی بن سکتے ہیں۔
ایک اوریگامی سے متاثر روبوٹ جسے UCLA کی زیرقیادت ٹیم نے ڈیزائن کیا ہے جو اپنے اینٹینا میں سے کسی کو رکاوٹ محسوس کرنے پر سمت کو الٹ سکتا ہے۔ (Wenzhong Yan, UCLA) لچکدار اور برقی طور پر ترسیلی مواد کو ایک پری کٹ، پتلی پالئیےسٹر فلم شیٹ میں سرایت کر کے، محققین نے انفارمیشن پروسیسنگ یونٹس، یا ٹرانزسٹرز کا ایک نظام بنایا، جسے سینسر اور ایکچیوٹرز کے ساتھ مربوط کیا جا سکتا ہے۔ اس کے بعد انہوں نے شیٹ کو سادہ کمپیوٹر کے مطابق افعال کے ساتھ پروگرام کیا جو سیمی کنڈکٹرز کی تقلید کرتے ہیں۔ ایک بار کاٹ، تہہ اور جمع ہونے کے بعد، شیٹ ایک خودمختار روبوٹ میں تبدیل ہو جاتی ہے جو اپنے ماحول کو درستگی کے ساتھ سمجھ، تجزیہ اور عمل کر سکتا ہے۔ محققین نے اپنے روبوٹ کا نام "اوریگا میکس" رکھا، اوریگامی میکانو بوٹس کے لیے مختصر۔ "یہ کام اوریگامی روبوٹس کی ایک نئی کلاس کی طرف لے جاتا ہے جس میں توسیعی صلاحیتوں اور خودمختاری کی سطح ہوتی ہے جبکہ اوریگامی فولڈنگ پر مبنی فیبریکیشن سے وابستہ سازگار صفات کو برقرار رکھا جاتا ہے،" مطالعہ کے لیڈ مصنف وینزونگ یان نے کہا، جو UCLA مکینیکل انجینئرنگ ڈاکٹریٹ کے طالب علم ہیں۔ OrigaMechs نے اپنی کمپیوٹنگ کی صلاحیتوں کو میکینیکل اوریگامی ملٹی پلیکس سوئچز کے مجموعے سے حاصل کیا جو فولڈز اور پروگرام شدہ بولین لاجک کمانڈز، جیسے "AND," "OR" اور "NOT" کے ذریعے بنائے گئے ہیں۔ سوئچز نے ایک میکانزم کو فعال کیا جو نظام میں متغیر دباؤ اور حرارت کے ان پٹ کی بنیاد پر برقی سگنلز کو منتخب طور پر آؤٹ پٹ کرتا ہے۔ نئے نقطہ نظر کا استعمال کرتے ہوئے، ٹیم نے نظام کی صلاحیت کو ظاہر کرنے کے لیے تین روبوٹ بنائے:
وینس فلائی ٹریپ نما روبوٹ جو ایک "شکار" کو لپیٹ لیتا ہے جب اس کے دونوں جبڑے کے سینسر کسی چیز کا پتہ لگاتے ہیں۔ (تصویر: یو سی ایل اے) جب کہ روبوٹ کو مظاہرے کے لیے طاقت کے منبع سے جوڑا گیا تھا، محققین نے کہا کہ طویل مدتی مقصد خود مختار اوریگامی روبوٹس کو پتلی فلم لیتھیم بیٹریوں سے چلنے والے ایمبیڈڈ انرجی اسٹوریج سسٹم کے ساتھ تیار کرنا ہوگا۔ چپ سے پاک ڈیزائن انتہائی ماحول میں کام کرنے کے قابل روبوٹس کا باعث بن سکتا ہے — مضبوط ریڈی ایٹیو یا مقناطیسی فیلڈز، اور ایسی جگہیں جہاں شدید ریڈیو فریکوئنسی سگنلز یا ہائی الیکٹرو سٹیٹک ڈسچارجز — جہاں روایتی سیمی کنڈکٹر پر مبنی الیکٹرانکس کام کرنے میں ناکام ہو سکتے ہیں۔ "اس قسم کے خطرناک یا غیر متوقع منظرنامے، جیسے کہ قدرتی یا انسان ساختہ آفت کے دوران، جہاں اوریگامی روبوٹ خاص طور پر کارآمد ثابت ہو سکتے ہیں،" مطالعہ کے پرنسپل تفتیش کار انکور مہتا، الیکٹریکل اور کمپیوٹر انجینئرنگ کے اسسٹنٹ پروفیسر اور UCLA کی لیبارٹری کے ڈائریکٹر نے کہا۔ ایمبیڈڈ مشینوں اور ہر جگہ روبوٹ کے لیے۔ مہتا نے مزید کہا، "روبوٹس کو خاص کاموں کے لیے ڈیزائن کیا جا سکتا ہے اور بہت جلد مانگ کے مطابق تیار کیا جا سکتا ہے۔" "اس کے علاوہ، جب کہ یہ بہت دور ہے، دوسرے سیاروں پر ایسے ماحول ہوسکتے ہیں جہاں ایکسپلورر روبوٹ جو ان منظرناموں سے بے نیاز ہوں، بہت مطلوبہ ہوں گے۔" اس لچکدار کٹ اور فولڈ تکنیک کے ذریعہ تیار کردہ پہلے سے جمع روبوٹس کو بڑے پیمانے پر جگہ کی بچت کے لئے فلیٹ پیکیجنگ میں منتقل کیا جاسکتا ہے۔ یہ خلائی مشن جیسے منظرناموں میں اہم ہے، جہاں ہر کیوبک سینٹی میٹر شمار ہوتا ہے۔ کم لاگت، ہلکے وزن اور سادہ سے بناوٹ کے روبوٹ جدید تعلیمی آلات یا کھلونوں اور گیمز کی نئی اقسام کا باعث بھی بن سکتے ہیں۔
- SEO سے چلنے والا مواد اور PR کی تقسیم۔ آج ہی بڑھا دیں۔
- پلیٹو بلاک چین۔ Web3 Metaverse Intelligence. علم میں اضافہ۔ یہاں تک رسائی حاصل کریں۔
- ماخذ: https://www.nanowerk.com/news2/robotics/newsid=62741.php
- : ہے
- 10
- 7
- 9
- a
- ایکٹ
- شامل کیا
- اعلی درجے کی
- کے بعد
- تجزیے
- تجزیہ
- قدیم
- اور
- نقطہ نظر
- کیا
- فن
- AS
- جمع
- اسسٹنٹ
- منسلک
- At
- اوصاف
- مصنف
- خود مختار
- کی بنیاد پر
- بیٹریاں
- BE
- تعمیر
- by
- کر سکتے ہیں
- صلاحیتوں
- صلاحیت رکھتا
- سینٹر
- سستی
- چپس
- طبقے
- مجموعہ
- پیچیدہ
- اجزاء
- کمپیوٹر
- کمپیوٹر انجینئرنگ
- کمپیوٹنگ
- سکتا ہے
- بنائی
- کٹ
- خطرناک
- تاریخ
- فیصلہ کرنا
- ڈیمانڈ
- مظاہرہ
- اخذ کردہ
- ڈیزائن
- ڈیزائن
- تفصیل
- ترقی
- مختلف
- سمت
- ڈائریکٹر
- آفت
- کے دوران
- آسان
- تعلیمی
- یا تو
- الیکٹرونکس
- ایمبیڈڈ
- کو چالو کرنے کے
- چالو حالت میں
- توانائی
- انجنیئرنگ
- ماحولیات
- ماحول
- خاص طور پر
- ہر کوئی
- توسیع
- ایکسپلورر
- اضافی
- انتہائی
- FAIL
- قطعات
- فلم
- فائنل
- فلیٹ
- لچکدار
- کے لئے
- فرکوےنسی
- سے
- مکمل طور پر
- تقریب
- افعال
- کھیل
- مقصد
- ہے
- ہائی
- تاہم
- HTTPS
- تصویر
- اہم
- in
- جدید
- ان پٹ
- ضم
- انضمام
- میں
- فوٹو
- تجربہ گاہیں
- قیادت
- لیڈز
- قیادت
- سطح
- ہلکا پھلکا
- لتیم
- لانگ
- طویل مدتی
- کم قیمت
- مشینیں
- بنا
- بناتا ہے
- تیار
- بڑے پیمانے پر
- مواد
- میکانی
- میکانی انجینرنگ
- میکانزم
- مشرق
- شاید
- مشن
- زیادہ
- منتقل
- کثیر مضامین
- نامزد
- قدرتی
- ضرورت
- نئی
- اعتراض
- رکاوٹ
- of
- on
- دیگر
- پیداوار
- پیکیجنگ
- کاغذ.
- انجام دینے کے
- مقامات
- سیارے
- پلاٹا
- افلاطون ڈیٹا انٹیلی جنس
- پلیٹو ڈیٹا
- ممکنہ
- طاقت
- طاقت
- صحت سے متعلق
- دباؤ
- پرنسپل
- ٹیچر
- پروگرام
- ثابت ہوا
- شائع
- جلدی سے
- ریڈیو
- تحقیق
- محققین
- جواب
- جواب دیں
- جواب
- ریورس
- کٹر
- میں روبوٹ
- روبوٹس
- کہا
- بچت
- منظرنامے
- سکول
- انجینئرنگ کے سکول
- Semiconductors
- احساس
- سینسر
- شکل
- مختصر
- سگنل
- اسی طرح
- سادہ
- ماخذ
- خلا
- خاص
- ذخیرہ
- مضبوط
- طالب علم
- مطالعہ
- اس طرح
- کے نظام
- کاموں
- ٹیم
- کہ
- ۔
- ان
- ان
- لہذا
- یہ
- تین
- کرنے کے لئے
- اوزار
- روایتی
- روایتی طور پر
- تبدیل
- نقل و حمل
- نقل و حمل
- اقسام
- ہر جگہ موجود
- ucla
- یونٹس
- ناقابل اعتبار
- مختلف اقسام کے
- زھرہ
- چلنا
- راستہ..
- وزن
- جس
- جبکہ
- ساتھ
- بغیر
- کام
- کام کر
- گا
- زیفیرنیٹ
سے زیادہ نانوورک
مشین لرننگ شکلوں کے بلڈنگ بلاکس کی تحقیقات کے لیے استعمال ہوتی ہے۔
ماخذ نوڈ: 2917167
ٹائم اسٹیمپ: اکتوبر 4، 2023
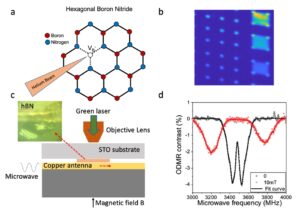
ہیلیئم آئن کی بمباری سے پیدا ہونے والے ہیکساگونل بوران نائٹرائڈ میں سپن کے نقائص
ماخذ نوڈ: 2782123
ٹائم اسٹیمپ: جولائی 24، 2023
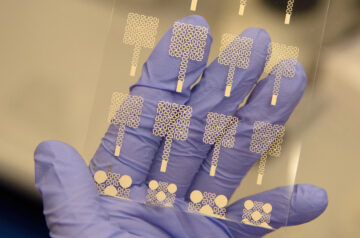
اسکرین پرنٹنگ کا طریقہ پہننے کے قابل الیکٹرانکس کو کم مہنگا بنا سکتا ہے۔
ماخذ نوڈ: 1896117
ٹائم اسٹیمپ: جنوری 12، 2023
لوہے پر مشتمل مواد میں الٹراسمال گھومتے ہوئے مقناطیسی بھوروں کا پتہ چلا
ماخذ نوڈ: 2559197
ٹائم اسٹیمپ: اپریل 2، 2023

تحقیق نینو پر مبنی علاج کے لیے نئی ممکنہ رکاوٹ کی نشاندہی کرتی ہے۔
ماخذ نوڈ: 2887620
ٹائم اسٹیمپ: ستمبر 18، 2023

محققین نے دنیا کا سب سے چھوٹا کرسمس ریکارڈ کاٹ دیا (ویڈیو)
ماخذ نوڈ: 1850116
ٹائم اسٹیمپ: دسمبر 22، 2022
ہیکساگونل بوران نائٹرائڈ کے ساتھ پلازمونک اضافہ کی حدود کو بڑھانا
ماخذ نوڈ: 2606223
ٹائم اسٹیمپ: اپریل 24، 2023


وہ کمپیوٹر جو خود سے چلنے والی کاروں کو طاقت دیتے ہیں وہ عالمی کاربن کے اخراج کا ایک بہت بڑا ڈرائیور ثابت ہو سکتے ہیں۔
ماخذ نوڈ: 1903892
ٹائم اسٹیمپ: جنوری 16، 2023