29 травня 2023 (Новини Nanowerk) Researchers from the Department of Mechanical Science and Bioengineering at Osaka University have invented a new kind of walking robot that takes advantage of dynamic instability to navigate. By changing the flexibility of the couplings, the robot can be made to turn without the need for complex computational control systems. This work may assist the creation of rescue robots that are able to traverse uneven terrain.
Most animals on Earth have evolved a robust locomotion system using legs that provides them with a high degree of mobility over a wide range of environments. Somewhat disappointingly, engineers who have attempted to replicate this approach have often found that legged robots are surprisingly fragile. The breakdown of even one leg due to the repeated stress can severely limit the ability of these robots to function.
In addition, controlling a large number of joints so the robot can transverse complex environments requires a lot of computer power. Improvements in this design would be extremely useful for building autonomous or semi-autonomous robots that could act as exploration or rescue vehicles and enter dangerous areas.
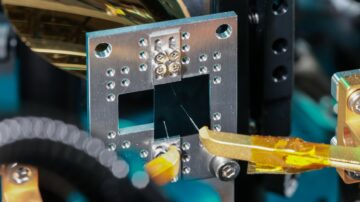
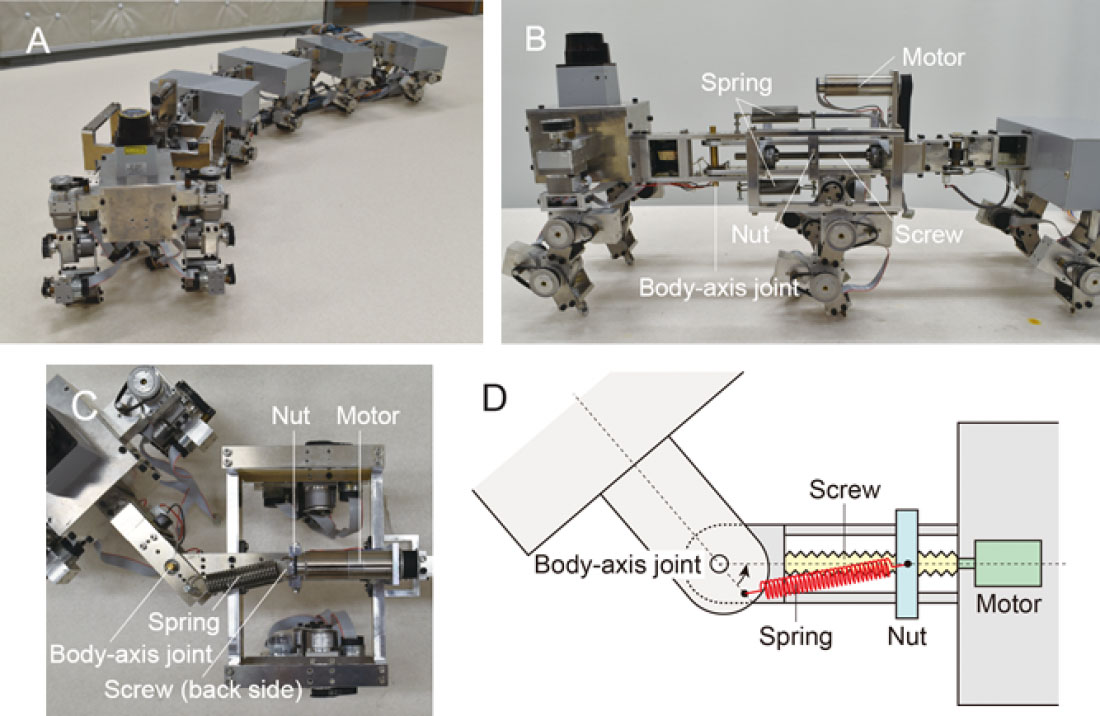 Myriapod robot (A) and Variable body-axis flexibility mechanism (B. Front view, C. Top view, D. Schematics of top view). (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
Now, investigators from Osaka University have developed a biomimetic “myriapod” robot that takes advantage of a natural instability that can convert straight walking into curved motion. In a study published recently in М'яка робототехніка (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), researchers from Osaka University describe their robot, which consists of six segments (with two legs connected to each segment) and flexible joints. Using an adjustable screw, the flexibility of the couplings can be modified with motors during the walking motion.
The researchers showed that increasing the flexibility of the joints led to a situation called a “pitchfork bifurcation,” in which straight walking becomes unstable. Instead, the robot transitions to walking in a curved pattern, either to the right or to the left. Normally, engineers would try to avoid creating instabilities. However, making controlled use of them can enable efficient maneuverability.
“We were inspired by the ability of certain extremely agile insects that allows them to control the dynamic instability in their own motion to induce quick movement changes,” says Shinya Aoi, an author of the study. Because this approach does not directly steer the movement of the body axis, but rather controls the flexibility, it can greatly reduce both the computational complexity as well as the energy requirements.
Myriapod robot (A) and Variable body-axis flexibility mechanism (B. Front view, C. Top view, D. Schematics of top view). (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
Now, investigators from Osaka University have developed a biomimetic “myriapod” robot that takes advantage of a natural instability that can convert straight walking into curved motion. In a study published recently in М'яка робототехніка (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), researchers from Osaka University describe their robot, which consists of six segments (with two legs connected to each segment) and flexible joints. Using an adjustable screw, the flexibility of the couplings can be modified with motors during the walking motion.
The researchers showed that increasing the flexibility of the joints led to a situation called a “pitchfork bifurcation,” in which straight walking becomes unstable. Instead, the robot transitions to walking in a curved pattern, either to the right or to the left. Normally, engineers would try to avoid creating instabilities. However, making controlled use of them can enable efficient maneuverability.
“We were inspired by the ability of certain extremely agile insects that allows them to control the dynamic instability in their own motion to induce quick movement changes,” says Shinya Aoi, an author of the study. Because this approach does not directly steer the movement of the body axis, but rather controls the flexibility, it can greatly reduce both the computational complexity as well as the energy requirements.
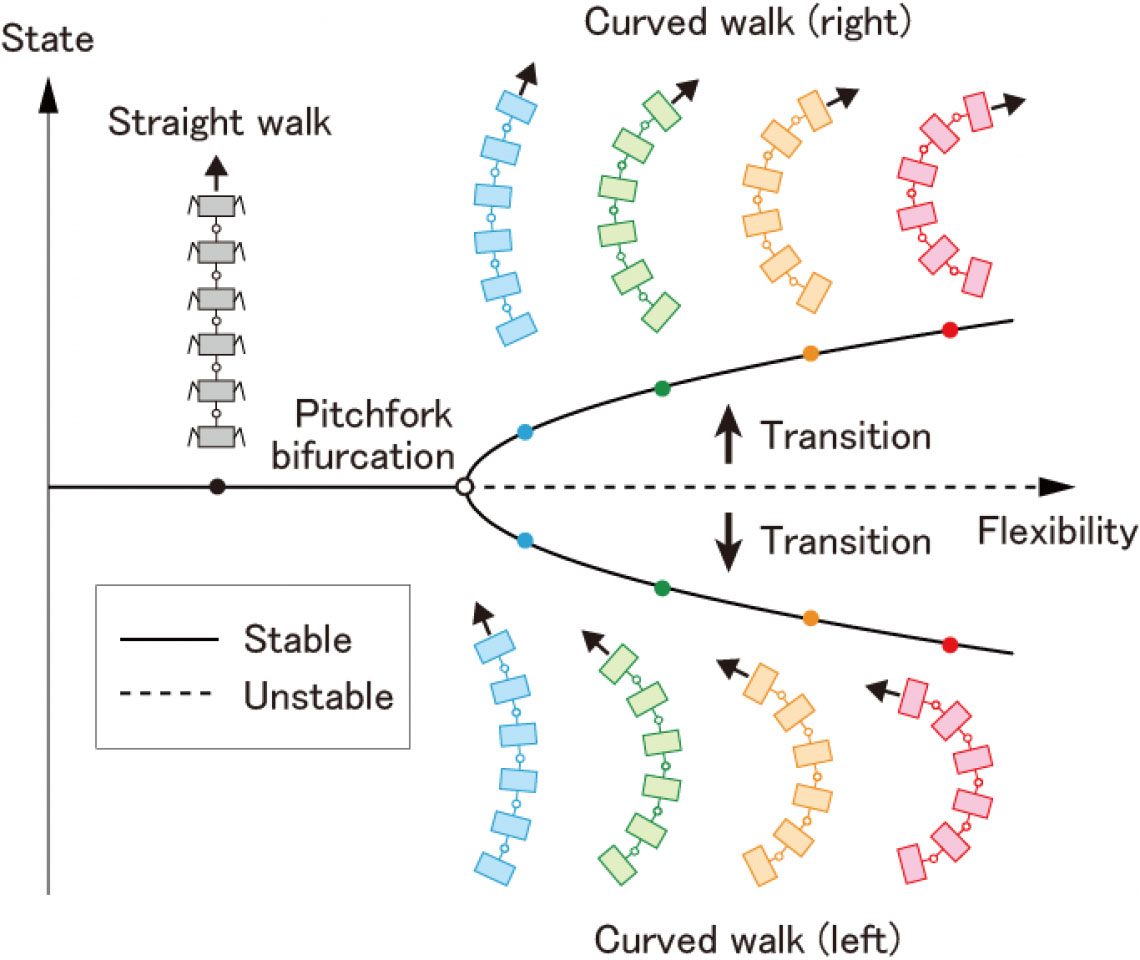 Stable and unstable walking patterns depending on the body-axis flexibility. (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
The team tested the robot’s ability to reach specific locations and found that it could navigate by taking curved paths toward targets. “We can foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments or exploration on other planets,” says Mau Adachi, another study author. Future versions may include additional segments and control mechanisms.
Stable and unstable walking patterns depending on the body-axis flexibility. (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
The team tested the robot’s ability to reach specific locations and found that it could navigate by taking curved paths toward targets. “We can foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments or exploration on other planets,” says Mau Adachi, another study author. Future versions may include additional segments and control mechanisms.
Myriapod robot (A) and Variable body-axis flexibility mechanism (B. Front view, C. Top view, D. Schematics of top view). (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
Now, investigators from Osaka University have developed a biomimetic “myriapod” robot that takes advantage of a natural instability that can convert straight walking into curved motion. In a study published recently in М'яка робототехніка (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), researchers from Osaka University describe their robot, which consists of six segments (with two legs connected to each segment) and flexible joints. Using an adjustable screw, the flexibility of the couplings can be modified with motors during the walking motion.
The researchers showed that increasing the flexibility of the joints led to a situation called a “pitchfork bifurcation,” in which straight walking becomes unstable. Instead, the robot transitions to walking in a curved pattern, either to the right or to the left. Normally, engineers would try to avoid creating instabilities. However, making controlled use of them can enable efficient maneuverability.
“We were inspired by the ability of certain extremely agile insects that allows them to control the dynamic instability in their own motion to induce quick movement changes,” says Shinya Aoi, an author of the study. Because this approach does not directly steer the movement of the body axis, but rather controls the flexibility, it can greatly reduce both the computational complexity as well as the energy requirements.
Stable and unstable walking patterns depending on the body-axis flexibility. (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
The team tested the robot’s ability to reach specific locations and found that it could navigate by taking curved paths toward targets. “We can foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments or exploration on other planets,” says Mau Adachi, another study author. Future versions may include additional segments and control mechanisms.
- Розповсюдження контенту та PR на основі SEO. Отримайте посилення сьогодні.
- PlatoAiStream. Web3 Data Intelligence. Розширення знань. Доступ тут.
- Карбування майбутнього з Адріенн Ешлі. Доступ тут.
- Купуйте та продавайте акції компаній, які вийшли на IPO, за допомогою PREIPO®. Доступ тут.
- джерело: https://www.nanowerk.com/news2/robotics/newsid=63068.php
- : ні
- 10
- 2022
- 2023
- 7
- 8
- 9
- a
- здатність
- Здатний
- Діяти
- доповнення
- Додатковий
- регульований
- Перевага
- моторний
- AL
- дозволяє
- an
- та
- тварини
- Інший
- застосування
- підхід
- ЕСТЬ
- області
- AS
- допомогу
- At
- спробував
- автор
- автономний
- уникнути
- Вісь
- BE
- оскільки
- стає
- тіло
- обидва
- Пробій
- Створюємо
- але
- by
- званий
- CAN
- Центр
- певний
- Зміни
- заміна
- комплекс
- складність
- комп'ютер
- потужність комп'ютера
- підключений
- контроль
- контроль
- управління
- управління
- конвертувати
- може
- створення
- створення
- Небезпечний
- Дата
- Ступінь
- відділ
- Залежно
- описувати
- дизайн
- розвиненою
- безпосередньо
- робить
- два
- під час
- динамічний
- E&T
- кожен
- земля
- ефективний
- або
- включіть
- енергія
- Інженери
- Що натомість? Створіть віртуальну версію себе у
- середовищах
- Навіть
- еволюціонували
- дослідження
- надзвичайно
- Гнучкість
- гнучкий
- для
- знайдений
- від
- перед
- функція
- майбутнє
- Go
- значно
- Мати
- Високий
- Однак
- HTTPS
- зображення
- поліпшення
- in
- включати
- зростаючий
- натхненний
- нестабільність
- замість
- в
- Винайдений
- Слідчі
- IT
- JPG
- Дитина
- великий
- Led
- залишити
- ноги
- МЕЖА
- місць
- серія
- made
- Робить
- Може..
- механічний
- механізм
- механізми
- Середній
- мобільність
- модифікований
- найбільш
- рух
- Двигуни
- руху
- Природний
- Переміщення
- Необхідність
- Нові
- нормально
- зараз
- номер
- of
- часто
- on
- ONE
- or
- Інше
- над
- власний
- Викрійки
- моделі
- Планети
- plato
- Інформація про дані Платона
- PlatoData
- влада
- забезпечує
- опублікований
- Швидко
- діапазон
- швидше
- досягати
- нещодавно
- зменшити
- повторний
- Вимога
- Вимагається
- рятувати
- Дослідники
- право
- робот
- робототехніка
- роботи
- міцний
- говорить
- сценарії
- наука
- Пошук
- сегмент
- сегменти
- сильно
- показав
- ситуація
- SIX
- So
- М'який
- кілька
- конкретний
- стабільний
- прямий
- стрес
- Вивчення
- такі
- система
- Systems
- приймає
- взяття
- цілі
- команда
- Що
- Команда
- їх
- Їх
- Ці
- це
- до
- топ
- до
- переходи
- намагатися
- ПЕРЕГЛЯД
- два
- університет
- використання
- використання
- різноманітність
- Транспортні засоби
- через
- вид
- ходьба
- ДОБРЕ
- були
- який
- ВООЗ
- широкий
- Широкий діапазон
- з
- без
- Work
- робочий
- б
- зефірнет
Більше від Нановерк


Інтеграція роботів на основі орігамі, які відчувають, приймають рішення та реагують
Вихідний вузол: 2565107
Часова мітка: Квітень 4, 2023
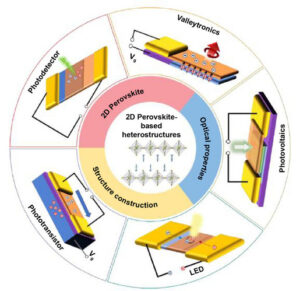
Дво/квазі-двовимірні гетероструктури на основі перовскіту: конструкція, властивості та застосування
Вихідний вузол: 1938788
Часова мітка: Лютий 3, 2023

Дослідники детально описують властивості надпровідних металів Кагоме, які ніколи раніше не бачили
Вихідний вузол: 1952937
Часова мітка: Лютий 11, 2023
Інтегровані фотонні схеми можуть допомогти закрити «терагерцову щілину»
Вихідний вузол: 1899339
Часова мітка: Січень 14, 2023

До 80 року викиди вуглецю від добрив можна скоротити на 2050%
Вихідний вузол: 1951214
Часова мітка: Лютий 11, 2023
Нові сегнетоелектрики для більш ефективної мікроелектроніки
Вихідний вузол: 2716345
Часова мітка: Червень 9, 2023
Як рекордний мідний нанокаталізатор перетворює CO2 на рідке паливо
Вихідний вузол: 1961058
Часова мітка: Лютий 16, 2023
Дослідники 3D-друкують функціональну тканину людського мозку
Вихідний вузол: 3093799
Часова мітка: Лютий 2, 2024
Розробка технологій для зниження вартості виробництва зеленого водню
Вихідний вузол: 2700260
Часова мітка: Червень 2, 2023
Розкриття секретів обертання за допомогою зондів з високою гармонікою
Вихідний вузол: 2969974
Часова мітка: Листопад 10, 2023