03 травня 2023 (Новини Nanowerk) Since the term “soft robotics” was adopted in 2008, engineers in the field have been building diverse representations of flexible machines useful in exploration, locomotion, rehabilitation, and even space. One source of inspiration: the way animals move in the wild.
A team of MIT researchers has taken this a step further, developing SoftZoo, a bio-inspired platform that enables engineers to study soft robot co-design. The framework optimizes algorithms that consist of design, which determines what the robot will look like; and control, or the system that enables robotic motion, improving how users automatically generate outlines for potential machines.
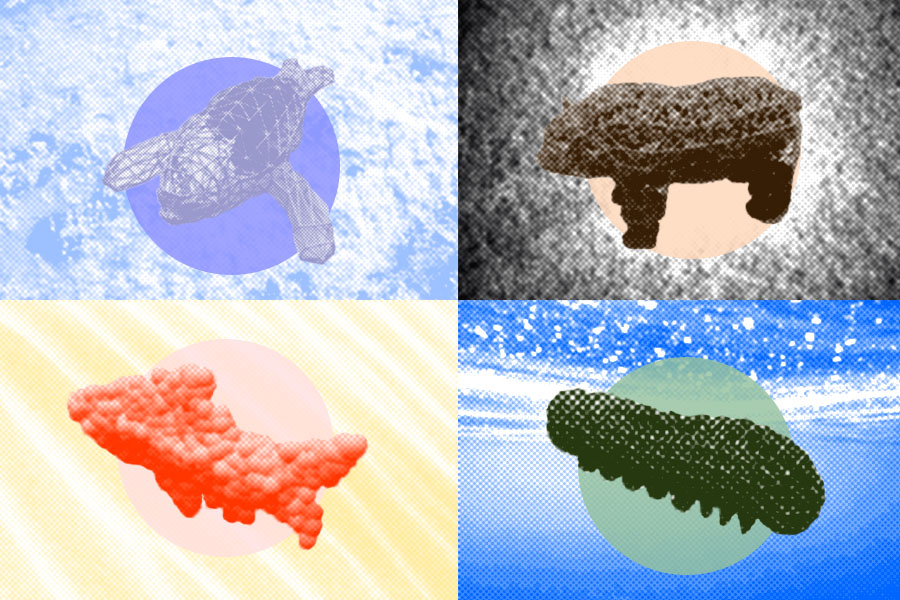 Researchers developed a system for soft robot co-design, which means jointly searching and optimizing for robot design — the shape of the robot, where to put muscle in the robot body, how soft the robot is in different body regions; and based on the robot design, the way to control it to achieve a target task. (Image: Alex Shipps/MIT CSAIL and the researchers)
Taking a walk on the wild side, the platform features 3-D models of animals such as panda bears, fishes, sharks, and caterpillars as designs that can simulate soft robotics tasks like locomotion, agile turning, and path following in different environments. Whether by snow, desert, clay, or water, the platform demonstrates the performance trade-offs of various designs in different terrains.
“Our framework can help users find the best configuration for a robot’s shape, allowing them to design soft robotics algorithms that can do many different things,” says MIT PhD student Tsun-Hsuan Wang, an affiliate of the Computer Science and Artificial Intelligence Laboratory (CSAIL) who is a lead researcher on the project. “In essence, it helps us understand the best strategies for robots to interact with their environments.”
SoftZoo is more comprehensive than similar platforms, which already simulate design and control, because it models movement that reacts to the physical features of various biomes. The framework’s versatility comes from a differentiable multiphysics engine, which allows for the simulation of several aspects of a physical system at the same time, such as a baby seal turning on ice or a caterpillar inching across a wetland environment. The engine’s differentiability optimizes co-design by reducing the number of the often expensive simulations required to solve computational control and design problems. As a result, users can design and move soft robots with more sophisticated, specified algorithms.
The system’s ability to simulate interactions with different terrain illustrates the importance of morphology, a branch of biology that studies the shapes, sizes, and forms of different organisms. Depending on the environment, some biological structures are more optimal than others, much like comparing blueprints for machines that complete similar tasks.
These biological outlines can inspire more specialized, terrain-specific artificial life. “A jellyfish’s gently undulating geometry allows it to efficiently travel across large bodies of water, inspiring researchers to develop new breeds of soft robots and opening up unlimited possibilities of what artificial creatures cultivated entirely in silico can be capable of,” says Wang. “Additionally, dragonflies can perform very agile maneuvers that other flying creatures cannot complete because they have special structures on their wings that change their center of mass when they fly. Our platform optimizes locomotion the same way a dragonfly is naturally more adept at working through its surroundings.”
Robots previously struggled to navigate through cluttered environments because their bodies were not compliant with their surroundings. With SoftZoo, though, designers could develop the robot’s brain and body simultaneously, co-optimizing both terrestrial and aquatic machines to be more aware and specialized. With increased behavioral and morphological intelligence, the robots would then be more useful in completing rescue missions and conducting exploration. If a person went missing during a flood, for example, the robot could potentially traverse the waters more efficiently because it was optimized using methods demonstrated in the SotftZoo platform.
“SoftZoo provides open-source simulation for soft robot designers, helping them build real-world robots much more easily and flexibly while accelerating the machines’ locomotion capabilities in diverse environments,” adds study co-author Chuang Gan, a research scientist at the MIT-IBM Watson AI Lab who will soon be an assistant professor at the University of Massachusetts at Amherst.
“This computational approach to co-designing the soft robot bodies and their brains (that is, their controllers) opens the door to rapidly creating customized machines that are designed for a specific task,” adds Daniela Rus, director of CSAIL and the Andrew and Erna Viterbi Professor in the MIT Department of Electrical Engineering and Computer Science (EECS), who is another author of the work.
Before any type of robot is constructed, the framework could be a substitute for field testing unnatural scenes. For example, assessing how a bear-like robot behaves in a desert may be challenging for a research team working in the urban plains of Boston. Instead, soft robotics engineers could use 3-D models in SoftZoo to simulate different designs and evaluate how effective the algorithms controlling their robots are at navigation. In turn, this would save researchers time and resources.
Still, the limitations of current fabrication techniques stand in the way of bringing these soft robot designs to life. “Transferring from simulation to physical robot remains unsolved and requires further study,” says Wang. “The muscle models, spatially varying stiffness, and sensorization in SoftZoo cannot be straightforwardly realized with current fabrication techniques, so we are working on these challenges.”
In the future, the platform’s designers are eyeing applications in human mechanics, such as manipulation, given its ability to test robotic control. To demonstrate this potential, Wang’s team designed a 3-D arm throwing a snowball forward.
Researchers developed a system for soft robot co-design, which means jointly searching and optimizing for robot design — the shape of the robot, where to put muscle in the robot body, how soft the robot is in different body regions; and based on the robot design, the way to control it to achieve a target task. (Image: Alex Shipps/MIT CSAIL and the researchers)
Taking a walk on the wild side, the platform features 3-D models of animals such as panda bears, fishes, sharks, and caterpillars as designs that can simulate soft robotics tasks like locomotion, agile turning, and path following in different environments. Whether by snow, desert, clay, or water, the platform demonstrates the performance trade-offs of various designs in different terrains.
“Our framework can help users find the best configuration for a robot’s shape, allowing them to design soft robotics algorithms that can do many different things,” says MIT PhD student Tsun-Hsuan Wang, an affiliate of the Computer Science and Artificial Intelligence Laboratory (CSAIL) who is a lead researcher on the project. “In essence, it helps us understand the best strategies for robots to interact with their environments.”
SoftZoo is more comprehensive than similar platforms, which already simulate design and control, because it models movement that reacts to the physical features of various biomes. The framework’s versatility comes from a differentiable multiphysics engine, which allows for the simulation of several aspects of a physical system at the same time, such as a baby seal turning on ice or a caterpillar inching across a wetland environment. The engine’s differentiability optimizes co-design by reducing the number of the often expensive simulations required to solve computational control and design problems. As a result, users can design and move soft robots with more sophisticated, specified algorithms.
The system’s ability to simulate interactions with different terrain illustrates the importance of morphology, a branch of biology that studies the shapes, sizes, and forms of different organisms. Depending on the environment, some biological structures are more optimal than others, much like comparing blueprints for machines that complete similar tasks.
These biological outlines can inspire more specialized, terrain-specific artificial life. “A jellyfish’s gently undulating geometry allows it to efficiently travel across large bodies of water, inspiring researchers to develop new breeds of soft robots and opening up unlimited possibilities of what artificial creatures cultivated entirely in silico can be capable of,” says Wang. “Additionally, dragonflies can perform very agile maneuvers that other flying creatures cannot complete because they have special structures on their wings that change their center of mass when they fly. Our platform optimizes locomotion the same way a dragonfly is naturally more adept at working through its surroundings.”
Robots previously struggled to navigate through cluttered environments because their bodies were not compliant with their surroundings. With SoftZoo, though, designers could develop the robot’s brain and body simultaneously, co-optimizing both terrestrial and aquatic machines to be more aware and specialized. With increased behavioral and morphological intelligence, the robots would then be more useful in completing rescue missions and conducting exploration. If a person went missing during a flood, for example, the robot could potentially traverse the waters more efficiently because it was optimized using methods demonstrated in the SotftZoo platform.
“SoftZoo provides open-source simulation for soft robot designers, helping them build real-world robots much more easily and flexibly while accelerating the machines’ locomotion capabilities in diverse environments,” adds study co-author Chuang Gan, a research scientist at the MIT-IBM Watson AI Lab who will soon be an assistant professor at the University of Massachusetts at Amherst.
“This computational approach to co-designing the soft robot bodies and their brains (that is, their controllers) opens the door to rapidly creating customized machines that are designed for a specific task,” adds Daniela Rus, director of CSAIL and the Andrew and Erna Viterbi Professor in the MIT Department of Electrical Engineering and Computer Science (EECS), who is another author of the work.
Before any type of robot is constructed, the framework could be a substitute for field testing unnatural scenes. For example, assessing how a bear-like robot behaves in a desert may be challenging for a research team working in the urban plains of Boston. Instead, soft robotics engineers could use 3-D models in SoftZoo to simulate different designs and evaluate how effective the algorithms controlling their robots are at navigation. In turn, this would save researchers time and resources.
Still, the limitations of current fabrication techniques stand in the way of bringing these soft robot designs to life. “Transferring from simulation to physical robot remains unsolved and requires further study,” says Wang. “The muscle models, spatially varying stiffness, and sensorization in SoftZoo cannot be straightforwardly realized with current fabrication techniques, so we are working on these challenges.”
In the future, the platform’s designers are eyeing applications in human mechanics, such as manipulation, given its ability to test robotic control. To demonstrate this potential, Wang’s team designed a 3-D arm throwing a snowball forward.
Researchers developed a system for soft robot co-design, which means jointly searching and optimizing for robot design — the shape of the robot, where to put muscle in the robot body, how soft the robot is in different body regions; and based on the robot design, the way to control it to achieve a target task. (Image: Alex Shipps/MIT CSAIL and the researchers)
Taking a walk on the wild side, the platform features 3-D models of animals such as panda bears, fishes, sharks, and caterpillars as designs that can simulate soft robotics tasks like locomotion, agile turning, and path following in different environments. Whether by snow, desert, clay, or water, the platform demonstrates the performance trade-offs of various designs in different terrains.
“Our framework can help users find the best configuration for a robot’s shape, allowing them to design soft robotics algorithms that can do many different things,” says MIT PhD student Tsun-Hsuan Wang, an affiliate of the Computer Science and Artificial Intelligence Laboratory (CSAIL) who is a lead researcher on the project. “In essence, it helps us understand the best strategies for robots to interact with their environments.”
SoftZoo is more comprehensive than similar platforms, which already simulate design and control, because it models movement that reacts to the physical features of various biomes. The framework’s versatility comes from a differentiable multiphysics engine, which allows for the simulation of several aspects of a physical system at the same time, such as a baby seal turning on ice or a caterpillar inching across a wetland environment. The engine’s differentiability optimizes co-design by reducing the number of the often expensive simulations required to solve computational control and design problems. As a result, users can design and move soft robots with more sophisticated, specified algorithms.
The system’s ability to simulate interactions with different terrain illustrates the importance of morphology, a branch of biology that studies the shapes, sizes, and forms of different organisms. Depending on the environment, some biological structures are more optimal than others, much like comparing blueprints for machines that complete similar tasks.
These biological outlines can inspire more specialized, terrain-specific artificial life. “A jellyfish’s gently undulating geometry allows it to efficiently travel across large bodies of water, inspiring researchers to develop new breeds of soft robots and opening up unlimited possibilities of what artificial creatures cultivated entirely in silico can be capable of,” says Wang. “Additionally, dragonflies can perform very agile maneuvers that other flying creatures cannot complete because they have special structures on their wings that change their center of mass when they fly. Our platform optimizes locomotion the same way a dragonfly is naturally more adept at working through its surroundings.”
Robots previously struggled to navigate through cluttered environments because their bodies were not compliant with their surroundings. With SoftZoo, though, designers could develop the robot’s brain and body simultaneously, co-optimizing both terrestrial and aquatic machines to be more aware and specialized. With increased behavioral and morphological intelligence, the robots would then be more useful in completing rescue missions and conducting exploration. If a person went missing during a flood, for example, the robot could potentially traverse the waters more efficiently because it was optimized using methods demonstrated in the SotftZoo platform.
“SoftZoo provides open-source simulation for soft robot designers, helping them build real-world robots much more easily and flexibly while accelerating the machines’ locomotion capabilities in diverse environments,” adds study co-author Chuang Gan, a research scientist at the MIT-IBM Watson AI Lab who will soon be an assistant professor at the University of Massachusetts at Amherst.
“This computational approach to co-designing the soft robot bodies and their brains (that is, their controllers) opens the door to rapidly creating customized machines that are designed for a specific task,” adds Daniela Rus, director of CSAIL and the Andrew and Erna Viterbi Professor in the MIT Department of Electrical Engineering and Computer Science (EECS), who is another author of the work.
Before any type of robot is constructed, the framework could be a substitute for field testing unnatural scenes. For example, assessing how a bear-like robot behaves in a desert may be challenging for a research team working in the urban plains of Boston. Instead, soft robotics engineers could use 3-D models in SoftZoo to simulate different designs and evaluate how effective the algorithms controlling their robots are at navigation. In turn, this would save researchers time and resources.
Still, the limitations of current fabrication techniques stand in the way of bringing these soft robot designs to life. “Transferring from simulation to physical robot remains unsolved and requires further study,” says Wang. “The muscle models, spatially varying stiffness, and sensorization in SoftZoo cannot be straightforwardly realized with current fabrication techniques, so we are working on these challenges.”
In the future, the platform’s designers are eyeing applications in human mechanics, such as manipulation, given its ability to test robotic control. To demonstrate this potential, Wang’s team designed a 3-D arm throwing a snowball forward.
- Розповсюдження контенту та PR на основі SEO. Отримайте посилення сьогодні.
- PlatoAiStream. Web3 Data Intelligence. Розширення знань. Доступ тут.
- Карбування майбутнього з Адріенн Ешлі. Доступ тут.
- джерело: https://www.nanowerk.com/news2/robotics/newsid=62936.php
- : має
- :є
- : ні
- :де
- $UP
- 10
- 11
- 12
- 8
- 9
- a
- здатність
- прискорення
- Achieve
- через
- Додає
- прийнята
- філія
- моторний
- AI
- Alex
- алгоритми
- Дозволити
- дозволяє
- вже
- an
- та
- Ендрю
- тварини
- Інший
- будь-який
- застосування
- підхід
- ЕСТЬ
- ARM
- зброю
- штучний
- штучний інтелект
- AS
- аспекти
- Оцінювання
- Помічник
- At
- автор
- автоматично
- дитина
- заснований
- BE
- ведмеді
- оскільки
- було
- перед тим
- КРАЩЕ
- біологія
- тіло
- Бостон
- обидва
- Brain
- мізки
- Філія
- Приведення
- будувати
- Створюємо
- by
- CAN
- не може
- можливості
- здатний
- Центр
- проблеми
- складні
- зміна
- Співавтор
- приходить
- порівняння
- повний
- завершення
- поступливий
- всеосяжний
- комп'ютер
- Інформатика
- Проведення
- конфігурація
- контроль
- управління
- може
- створення
- ЦАЙЛ
- Поточний
- налаштувати
- Дата
- демонструвати
- продемонстрований
- демонструє
- відділ
- Залежно
- БУДУВАТИ
- дизайн
- призначений
- Дизайнери
- конструкцій
- визначає
- розвивати
- розвиненою
- розвивається
- різний
- Директор
- Різне
- do
- Двері
- Стрекози
- Бабка
- під час
- легко
- Ефективний
- продуктивно
- електротехніка
- дозволяє
- двигун
- Машинобудування
- Інженери
- повністю
- Навколишнє середовище
- середовищах
- сутність
- оцінювати
- Навіть
- приклад
- дорогий
- дослідження
- риси
- поле
- знайти
- гнучкий
- повінь
- політ
- після
- для
- форми
- Вперед
- Рамки
- від
- далі
- майбутнє
- породжувати
- геометрія
- даний
- схопити
- Мати
- допомога
- допомогу
- допомагає
- Як
- HTTPS
- людина
- ICE
- if
- ілюструє
- зображення
- значення
- поліпшення
- in
- У тому числі
- збільшений
- натхнення
- вселяти
- надихаючий
- замість
- Інтелект
- взаємодіяти
- Взаємодії
- IT
- ЙОГО
- JPG
- lab
- лабораторія
- великий
- вести
- життя
- як
- недоліки
- подивитися
- виглядає як
- Машинки для перманенту
- Маніпуляція
- багато
- Маса
- Массачусетс
- Може..
- засоби
- механіка
- методика
- Середній
- відсутній
- місіях
- MIT
- Моделі
- більше
- рух
- рухатися
- руху
- багато
- Переміщення
- навігація
- Нові
- номер
- об'єкти
- of
- часто
- on
- ONE
- з відкритим вихідним кодом
- відкриття
- Відкриється
- оптимальний
- оптимізований
- Оптимізує
- оптимізуючий
- or
- Інше
- інші
- наші
- контури
- шлях
- виконувати
- продуктивність
- людина
- фізичний
- платформа
- Платформи
- plato
- Інформація про дані Платона
- PlatoData
- можливостей
- потенціал
- потенційно
- раніше
- проблеми
- Професор
- проект
- забезпечує
- put
- швидко
- вступає в реакцію
- Реальний світ
- зрозумів,
- зниження
- райони
- реабілітація
- залишається
- вимагається
- Вимагається
- рятувати
- дослідження
- дослідник
- Дослідники
- ресурси
- результат
- робот
- робототехніка
- роботи
- то ж
- зберегти
- говорить
- сцени
- наука
- вчений
- Грати короля карти - безкоштовно Nijumi логічна гра гри
- кілька
- Форма
- форми
- Акули
- сторона
- аналогічний
- моделювання
- одночасно
- з
- розміри
- сніг
- So
- М'який
- ВИРІШИТИ
- деякі
- Скоро
- складний
- Source
- Простір
- спеціальний
- спеціалізований
- конкретний
- зазначений
- стек
- стояти
- Крок
- Як і раніше
- стратегії
- студент
- Дослідження
- Вивчення
- такі
- система
- взяття
- Мета
- Завдання
- завдання
- команда
- методи
- наземний
- тест
- Тестування
- ніж
- Що
- Команда
- Майбутнє
- їх
- Їх
- потім
- Ці
- вони
- речі
- це
- хоча?
- через
- Кидання
- час
- до
- подорожувати
- ПЕРЕГЛЯД
- Поворот
- тип
- розуміти
- університет
- необмежений
- міський
- us
- використання
- користувачі
- використання
- різний
- дуже
- було
- вода
- Води
- Уотсон
- шлях..
- we
- були
- Що
- коли
- Чи
- який
- в той час як
- ВООЗ
- Wild
- Жива природа
- волі
- з
- Work
- робочий
- б
- зефірнет
Більше від Нановерк

Вчені відкривають новий метод генерації металевих наночастинок для використання в якості каталізаторів
Вихідний вузол: 3039388
Часова мітка: Грудень 28, 2023

Керівництво дизайном кремнієвих пристроїв з підвищеною ефективністю
Вихідний вузол: 2839986
Часова мітка: Серпень 23, 2023
Роботизовані бджоли та коріння дають надію на здоровіше середовище та достатню кількість їжі
Вихідний вузол: 1977685
Часова мітка: Лютий 25, 2023

Нанорозмірний вуглецевий матеріал можна використовувати для лікування синдрому Дауна
Вихідний вузол: 2778869
Часова мітка: Липень 21, 2023
Нейроморфний синапс, створений із основних матеріалів для OLED-телевізорів
Вихідний вузол: 2541090
Часова мітка: Березень 24, 2023

Прискорення стійких напівпровідників за допомогою «багатоелементного чорнила»
Вихідний вузол: 2911790
Часова мітка: Вересень 28, 2023
Світловий нанокаталізатор для виробництва водню за допомогою сонячного світла
Вихідний вузол: 3053672
Часова мітка: Січень 10, 2024
Вчені спостерігають перехід до хаотичної поведінки на нанометровому масштабі
Вихідний вузол: 1982382
Часова мітка: Лютий 27, 2023

Роботи та штучний інтелект об’єднуються, щоб відкрити високоселективні каталізатори
Вихідний вузол: 1940293
Часова мітка: Лютий 3, 2023