En robotiserad japansk månlandare landade på månytan i fredags, men den drabbades omedelbart av ett strömfel av något slag som hindrade dess solceller från att generera den elektricitet som behövs för att hålla den vid liv i den hårda månmiljön.
Som ett resultat, sade uppdragsledare, förväntades den annars uppenbarligen friska Smart Lander for Investigating (the) Moon, eller SLIM, ta ur sina batterier inom några timmar efter landning, vilket gör den maktlös och oförmögen att ta emot kommandon eller sända telemetri och vetenskapsdata tillbaka till jorden.
Det finns hopp om att sonden skulle kunna "vakna" någon gång, förutsatt att rymdfarkosten landade i fel orientering och att vinkeln mellan solen och solcellerna förbättras tillräckligt med tiden för att generera tillräckligt med kraft, men tjänstemän sa att det inte alls är säkert.
"SLIM har kommunicerat med jordstationen och den tar emot kommandon från jorden exakt och rymdfarkosten svarar på dessa på ett normalt sätt," sa Hitoshi Kuninaka, generaldirektör för Japan Aerospace Research Agency, eller JAXA, till reportrar i översatta anmärkningar.
"Men det verkar som att solcellerna (cellerna) inte genererar elektricitet vid denna tidpunkt. Och eftersom vi inte kan generera el så sker driften med batterier. … Vi försöker (få lagrad data) tillbaka till jorden, och vi gör ansträngningar för att maximera det vetenskapliga (återkomsten).
Endast USA, Ryssland, Kina och Indien har framgångsrikt landat rymdfarkoster på månen. Tre privatfinansierade landningsuppdrag har lanserats som kommersiella satsningar, men alla tre misslyckades.
Senast strandade Peregrine-landaren, byggd av Pittsburgh-baserade Astrobotic, i en mycket elliptisk jordbana efter att ett fel i en ventil fick en drivmedelstank att spricka kort efter lanseringen den 8 januari. Företagets flygledare riktade rymdfarkosten att falla tillbaka i jordens atmosfär där det brann upp torsdag eftermiddag.
Under en separat nyhetsbriefing på fredagen berömde Astrobotics vd John Thornton företagets flygledare för att de lyckats hålla rymdfarkosten vid liv så länge som möjligt, aktivera dess vetenskapliga nyttolaster och samla in data som kommer att matas tillbaka till designen och driften av en större månlandare — Griffin — planerad att lanseras sent i år.
"Vi kommer att sammansätta en granskningsnämnd med många experter från hela branschen för att ta en närmare titt på detta för att ta reda på exakt vad som hände," sa Thornton. "Vi utvärderar redan vad dessa effekter kan vara för Griffin-programmet för att säkerställa att den här typen av anomali aldrig händer igen."
Samtidigt tillade han, "vi ser också till att införliva alla framgångar av det som fungerade på Peregrine-uppdraget i Griffin-programmet för att se till att Griffin blir framgångsrik. … Jag är mer säker än någonsin nu på att vårt nästa uppdrag kommer att bli framgångsrikt och landa på månens yta.”
JAXAs månlandare byggdes för att uppnå två huvudmål: att demonstrera ett landningssystem med hög precision som kan styra sonden till landning inom 100 meter, eller ungefär längden på en amerikansk fotbollsplan, från dess planerade mål; och att testa en innovativ lättviktsdesign som tillåter mindre rymdfarkoster att bära fler sensorer och instrument.
Lanserades den 7 september från Tanegashima Space Center i södra Japan, rymdfarkosten på 1,600 373 pund gled in i en ursprungligen elliptisk bana runt månens poler på juldagen och övergick till en cirkulär XNUMX mil hög bana tidigare denna månad.
Fredag morgon amerikansk tid började rymdfarkosten SLIM sin sista nedstigning till månens yta från en höjd av cirka nio miles. Realtidstelemetri visade att fordonet exakt följde den planerade banan, pausade flera gånger på vägen för att fotografera ytan nedanför och jämföra vyn med kartor ombord för att säkerställa den förväntade högprecisionslandningen.
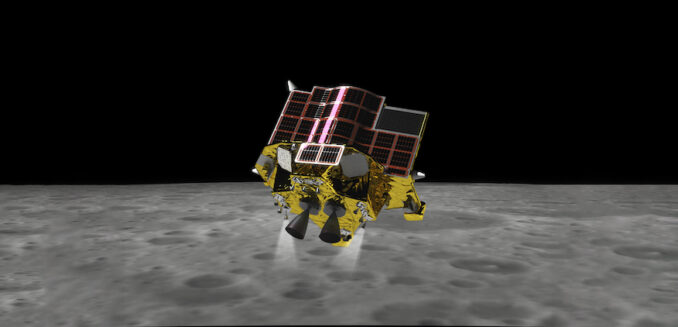
De sista etapperna av nedstigningen såg ut att gå smidigt. SLIM vände från en horisontell till vertikal orientering precis i tid och föll långsamt mot ytan. Den var programmerad att släppa två mikrorovers, kända som LEV-1 och LEV-2, bara några meter innan den landade.
Designad för att landa på en sluttning, förväntades sondens två bakre ben landa först. Rymdfarkosten konstruerades sedan för att luta framåt något och föra ned frambenen. Tanken var att orientera rymdfarkosten på sluttande terräng i en position som skulle maximera solenergiproduktionen.
Telemetri indikerade en landning klockan 10:20 EST, cirka 20 minuter efter början av nedstigningen. JAXA-tjänstemän bekräftade inte omedelbart mottagandet av telemetri, vilket väckte oro för att rymdfarkosten kanske inte hade överlevt landningsögonblicket.
Men i ett hoppfullt tecken tog NASA:s Deep Space Network, som skickar kommandon och tar emot data från rymdfarkoster över solsystemet, telemetri från SLIM eller en av de små rovers - eller båda - en timme efter landning.
Vid presskonferensen efter landningen bekräftade JAXA-tjänstemän att flygkontrollanter tog emot telemetri från både SLIM och LEV-1, som designades för att skicka data direkt tillbaka till jorden. LEV-2 förmedlar data tillbaka genom SLIM.
"Vi anser att LEV-1 och LEV-2 har separerats framgångsrikt, och vi anstränger oss för att skaffa data vid denna tidpunkt", säger Kuninaka.
När det gäller SLIM sa han att ingenjörer tvivlar på att solcellerna, monterade på den övre ytan av rymdfarkosten, skadades i landningen eftersom andra system fungerade normalt efter vad han beskrev som en "mjuk" landning.
"Rymdfarkosten kunde skicka telemetri till oss (efter landning), vilket betyder att det mesta av utrustningen på rymdfarkosten är funktionell och fungerar korrekt", sa han. "Tio kilometer var höjden från vilken nedstigning gjordes. Så om nedstigningen inte var framgångsrik, skulle det ha skett en (krasch) i mycket hög hastighet. Då skulle rymdfarkostens funktion ha gått förlorad helt.
"Men nu är det fortfarande att skicka data ordentligt till oss, vilket betyder att vårt ursprungliga mål med mjuklandning var framgångsrikt."
Men han sa att omfattande dataanalys kommer att krävas för att bestämma rymdfarkostens attityd, eller orientering, på ytan, för att ta reda på vad som hände och för att ta reda på hur exakt landningen faktiskt var.
- SEO-drivet innehåll och PR-distribution. Bli förstärkt idag.
- PlatoData.Network Vertical Generative Ai. Styrka dig själv. Tillgång här.
- PlatoAiStream. Web3 Intelligence. Kunskap förstärkt. Tillgång här.
- Platoesg. Kol, CleanTech, Energi, Miljö, Sol, Avfallshantering. Tillgång här.
- PlatoHealth. Biotech och kliniska prövningar Intelligence. Tillgång här.
- Källa: https://spaceflightnow.com/2024/01/19/japanese-moon-lander-touches-down-but-crippled-by-mission-ending-power-glitch/
- : har
- :är
- :inte
- :var
- $UPP
- 1
- 10
- 100
- 20
- 678
- 7
- 8
- a
- Able
- Om oss
- exakt
- Uppnå
- förvärva
- tvärs
- aktivering
- faktiskt
- lagt till
- Aerospace
- Efter
- igen
- byrå
- Syftet
- levande
- Alla
- tillåta
- längs
- redan
- också
- am
- an
- analys
- och
- syntes
- lämpligt
- ÄR
- runt
- AS
- bedöma
- At
- Atmosfär
- attityd
- tillbaka
- batterier
- BE
- Stråle
- varit
- innan
- började
- Där vi får lov att vara utan att konstant prestera,
- nedan
- mellan
- ombord
- båda
- Genomgång
- Föra
- byggt
- bränd
- men
- by
- kapabel
- bära
- orsakas
- Celler
- Centrum
- VD
- vissa
- Kina
- Jul
- cirkulär
- Stäng
- Samla
- kommersiella
- kommunicera
- företag
- jämföra
- fullständigt
- Oro
- Konferens
- säker
- Bekräfta
- BEKRÄFTAT
- Tänk
- kunde
- Crash
- datum
- dataanalys
- dag
- djup
- demonstrera
- beskriven
- Designa
- utformade
- lust
- Detektering
- Bestämma
- DID
- riktad
- direkt
- Direktör
- do
- gjort
- tvivlar
- ner
- tappade
- Tidigare
- jord
- ansträngning
- ansträngningar
- el
- Ingenjörer
- tillräckligt
- säkerställa
- Miljö
- Utrustning
- NÅGONSIN
- exakt
- förväntat
- experter
- omfattande
- Misslyckades
- Höst
- Fed
- fot
- få
- fält
- Figur
- slutlig
- sista etappen
- hitta
- Förnamn
- flyg
- efter
- fotboll
- För
- Framåt
- Fredag
- från
- främre
- fungera
- funktionella
- Allmänt
- generera
- generera
- generering
- skaffa sig
- ges
- tekniskt fel
- Go
- kommer
- grafisk
- Griffin
- styrning
- hänt
- händer
- Har
- he
- friska
- Hög
- höggradigt
- hoppas
- hoppingivande
- timme
- ÖPPETTIDER
- Hur ser din drömresa ut
- http
- HTTPS
- i
- Tanken
- if
- blir omedelbart
- Konsekvenser
- förbättrar
- in
- införliva
- indien
- indikerade
- industrin
- initialt
- innovativa
- instrument
- in
- IT
- DESS
- jan
- Japan
- japanska
- John
- jpg
- bara
- Ha kvar
- Snäll
- känd
- land
- landning
- större
- Sent
- lansera
- lanserades
- lämnar
- ben
- Längd
- lättvikt
- Lång
- se
- förlorat
- Lunar
- gjord
- större
- göra
- Framställning
- chefer
- hantera
- många
- kartor
- max-bredd
- Maximera
- betyder
- mikro
- kanske
- minuter
- Mission
- uppdrag
- Månad
- Månen
- mer
- morgonen
- mest
- behövs
- nät
- aldrig
- nyheter
- Nästa
- nio
- normala
- normalt
- nu
- mål
- mål
- hinder
- of
- tjänstemän
- on
- ONE
- drift
- or
- orbit
- ursprungliga
- Övriga
- annat
- vår
- ut
- över
- pausa
- planeras
- plato
- Platon Data Intelligence
- PlatonData
- Punkt
- placera
- möjlig
- kraft
- Berömde
- exakt
- exakt
- förhindras
- sond
- Program
- programmerad
- ordentligt
- höja
- realtid
- motta
- erhåller
- mottagande
- nyligen
- frigöra
- Obligatorisk
- forskning
- reagera
- resultera
- avkastning
- översyn
- höger
- Ryssland
- s
- Nämnda
- Samma
- planerad
- Vetenskap
- vetenskaplig
- verkar
- sända
- skicka
- sänder
- sensor
- separat
- sju
- flera
- Inom kort
- visade
- signera
- eftersom
- Lutning
- Långsamt
- mindre
- smarta
- mjukt
- So
- Mjuk
- sol-
- Solceller
- Solkraft
- Solsystem
- några
- Sydlig
- Utrymme
- rymdfarkoster
- fart
- stadier
- starta
- Stater
- stationen
- Fortfarande
- lagras
- framgångar
- framgångsrik
- Framgångsrikt
- sol
- säker
- yta
- Överlevde levde~~POS=HEADCOMP
- system
- System
- Ta
- tank
- Målet
- Tekniken
- testa
- än
- den där
- Smakämnen
- sedan
- Där.
- Dessa
- detta
- i år
- de
- tre
- Genom
- torsdag
- tid
- gånger
- till
- berättade
- Rör
- rörd
- nycklar
- rörande
- mot
- bana
- transitioned
- överföra
- försöker
- två
- oss
- oförmögen
- United
- USA
- us
- med hjälp av
- ventil
- vehikel
- Ventures
- mycket
- utsikt
- var
- Sätt..
- we
- były
- Vad
- som
- kommer
- inom
- arbetade
- arbetssätt
- skulle
- Fel
- år
- zephyrnet