ХЕЛЬСИНКИ – Японский спускаемый аппарат SLIM достиг своей цели - точной посадки на Луну, используя только один из двух работающих главных двигателей, заявило в четверг JAXA, в то время как небольшой марсоход вернул изображение космического корабля.
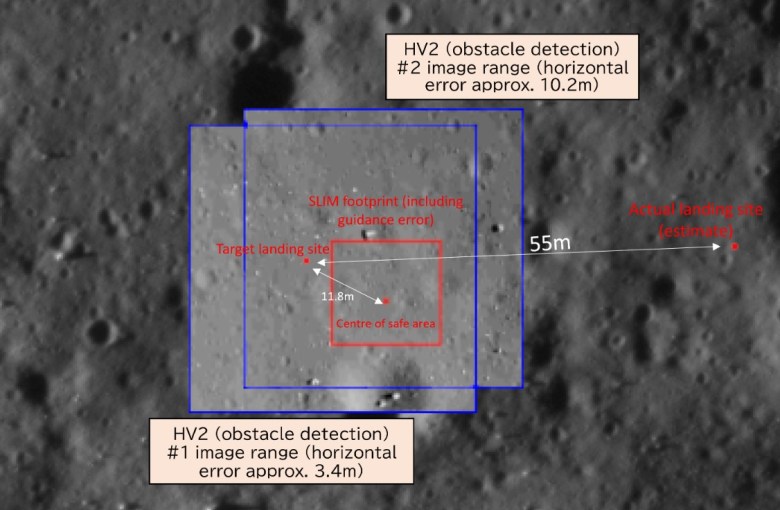
SLIM совершил точную посадку в точках 25.24889 восточной долготы и 13.31549 южной широты на склоне кратера Сиоли, в 55 метрах от целевой точки, заявил Шиничиро Сакаи, менеджер проекта группы SLIM в JAXA, во время пресс-конференции рано утром в четверг (25 января), выполняя Ключевой критерий миссии.
Агентство стремилось обеспечить высокоточную посадку, определяемую как посадку в пределах 100 метров от целевой точки.
SLIM сделал свое историческая посадка на Луну 19 января, также успешно выпустив на поверхность пару небольших марсоходов непосредственно перед приземлением. Посадка SLIM сделала Японию пятой страной, совершившей высадку на Луну, но проблемы с выработкой электроэнергии привели к тому, что активное время космического корабля на поверхности было сокращено. оборвать. Однако остается надежда, что SLIM можно будет возобновить до конца месяца.
Однако Сакаи сообщил, что один из двух главных двигателей, вероятно, вышел из строя на заключительном этапе приземления. Это произошло на высоте 50 метров до приземления, что привело к непреднамеренному боковому движению наверху.
«В этих обстоятельствах бортовое программное обеспечение SLIM автономно идентифицирует аномалию, и, максимально контролируя горизонтальное положение, SLIM продолжил снижение с другим двигателем и постепенно двинулся на восток».
Посадку SLIM планировалось осуществить в два этапа. Сначала с опущенными посадочными двигателями, затем сработавшим двигателем меньшего размера, чтобы опрокинуть космический корабль на бок. Затем SLIM амортизируется пятью разрушаемыми алюминиевыми решетчатыми опорами, напечатанными на 3D-принтере.
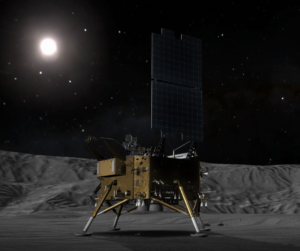
На снимке SLIM, сделанном одним из марсоходов, трансформируемым лунным роботом LEV-2, видно, что космический корабль находится на поверхности Луны с двигателем, направленным вверх. Причина очевидной неисправности двигателя устанавливается.
Положение при посадке означало, что солнечная батарея SLIM была обращена на запад, в результате чего изначально она не получала солнечного света. Однако JAXA заявляет, что существует вероятность того, что солнечные элементы смогут генерировать электроэнергию в течение лунного вечера, когда освещение улучшится.
«Хотя первоначально предполагалось, что деятельность SLIM на Луне продлится всего несколько дней, необходимая подготовка к восстановлению будет продолжена, чтобы получить дальнейшие технические и научные данные», — заявил представитель SLIM. заявление читать.
Ситуация напоминает посадочный модуль Philae в рамках европейской миссии Rosetta. Филе отскочила при попытке приземлиться на комету 67P в 2014 году. У нее также возникли проблемы с освещением, прежде чем она ненадолго проснулась.
Ранее JAXA заявляло, что SLIM отключила батарею при 12%, как и планировалось, чтобы предотвратить чрезмерную разрядку. SLIM отключился в 12:57 по восточному времени (1757:19 UTC) 10 января, всего через два с половиной часа после приземления в 20:1520 по восточному времени (XNUMX:XNUMX UTC).
Многополосная спектроскопическая камера (MBC), установленная на SLIM, смогла работать в экспериментальном режиме и захватывать изображения до отключения питания. ДЖАКСА опубликованный изображение MBC, созданное путем синтеза 257 монохромных изображений низкого разрешения. MBC будет введен в действие, если SLIM сможет повторно активироваться.
«Идет подготовка к оперативному проведению 10-полосных спектроскопических наблюдений с высоким разрешением, как только условия солнечного освещения улучшатся и SLIM восстановится за счет энергии, генерируемой солнечной батареей», — заявило JAXA.
Небольшой марсоход Lunar Excursion Vehicle (LEV-2.1) массой 1 килограмма успешно провел деятельность на поверхности Луны, в том числе выполнил запланированные прыжковые движения. LEV-1 достиг прямой связи с наземными станциями, включая тестовую передачу радиоволн между роботами от LEV-2. По данным JAXA, получение изображения с помощью LEV-1 на данный момент не подтверждено.
ЛЭВ-1 находится в режиме ожидания на поверхности Луны. «Хотя существует возможность возобновить деятельность в зависимости от выработки солнечной энергии из-за изменения направления Солнца, будут прилагаться усилия для продолжения приема сигналов от LEV-1», — заявили в JAXA.
Ровер LEV-0.25 размером с бейсбольный мяч и массой 2 кг, получивший прозвище SORA-Q, проехал по поверхности Луны и сделал снимки SLIM. «В настоящее время мы анализируем другие данные, в том числе журналы поездок, и планируем опубликовать результаты в будущем», — отметило JAXA в сообщении. заявление на вездеходе.
LEV-2 был разработан совместно JAXA, Tomy, Sony и Университетом Дошиша. По данным JAXA, это самый маленький и легкий луноход в истории.
«LEV-2 «SORA-Q», который был разработан путем объединения игрушечных технологий, новейших технологий сенсорной робототехники и космических технологий JAXA, имеет превосходные характеристики автономной работы и движения», — сказал директор Центра инноваций космических исследований JAXA Казуюки Фунаки.
Закат над кратером Шиоли ожидается примерно в начале UTC 31 января. Ни SLIM, ни его марсоходы не оснащены радиоизотопными нагревателями. Таким образом, ожидается, что они не переживут лунную ночь, когда температура упадет примерно до минус 130 по Цельсию.
- SEO-контент и PR-распределение. Получите усиление сегодня.
- PlatoData.Network Вертикальный генеративный ИИ. Расширьте возможности себя. Доступ здесь.
- ПлатонАйСтрим. Интеллект Web3. Расширение знаний. Доступ здесь.
- ПлатонЭСГ. Углерод, чистые технологии, Энергия, Окружающая среда, Солнечная, Управление отходами. Доступ здесь.
- ПлатонЗдоровье. Биотехнологии и клинические исследования. Доступ здесь.
- Источник: https://spacenews.com/japans-slim-achieved-pinpoint-moon-landing-with-just-one-working-engine/
- :имеет
- :является
- :нет
- ][п
- 1
- 10
- 100
- 12
- 13
- 130
- 19
- 20
- 2014
- 25
- 31
- 50
- a
- в состоянии
- выше
- По
- точный
- достигнутый
- приобретать
- приобретенный
- приобретение
- Действие
- активный
- активно
- деятельность
- После
- агентство
- Нацеленный
- причислены
- an
- анализ
- и
- очевидный
- МЫ
- около
- массив
- AS
- At
- попытка
- отношение
- автономный
- автономно
- основа
- аккумулятор
- BE
- было
- до
- не являетесь
- кратко
- но
- by
- камера
- CAN
- возможности
- захватить
- захваченный
- нести
- Вызывать
- Клетки
- Цельсия
- изменения
- характеристика
- обстоятельства
- комбинируя
- Связь
- состояние
- Проводить
- проводятся
- Конференция
- ПОДТВЕРЖДЕНО
- продолжать
- продолжающийся
- управление
- страна
- создали
- В настоящее время
- мягкая
- данным
- Дней
- определенный
- развитый
- направлять
- направление
- директор
- отключившийся
- вниз
- управляемый
- вождение
- Падение
- в течение
- Рано
- восток
- восточный
- усилия
- электричество
- конец
- Двигатель
- Европ
- вечер
- НИКОГДА
- отлично
- выполненный
- существует
- ожидаемый
- исследование
- всего лишь пяти граммов героина
- XNUMX ошибка
- несколько
- пятой
- окончательный
- стрельба
- First
- 5
- Что касается
- от
- выполнение
- далее
- будущее
- порождать
- генерируется
- поколение
- цель
- постепенно
- земля
- Половина
- высокое разрешение
- надежды
- горизонтальный
- ЧАСЫ
- Однако
- HTML
- HTTPS
- хаб
- идентифицирует
- if
- изображение
- изображений
- улучшается
- in
- В том числе
- Индийская кухня
- первоначально
- Инновации
- предназначенных
- в
- вопросы
- IT
- ЕГО
- Января
- Япония
- Японии
- JPG
- всего
- только один
- Основные
- Земля
- посадка
- Фамилия
- последний
- ноги
- Вероятно
- Lunar
- сделанный
- Главная
- Создание
- менеджер
- макс-ширина
- МБК
- означает,
- Наша миссия
- монохромный
- Месяц
- луна
- движение
- переехал
- движения
- много
- Навигация
- необходимо
- ни
- ни
- отметил,
- сейчас
- наблюдения
- происходить
- of
- от
- on
- Onboard
- консолидировать
- ONE
- только
- работать
- операционный
- операция
- заказ
- первоначально
- Другое
- за
- пара
- часть
- фаза
- Картинки
- Часть
- план
- запланированный
- Платон
- Платон Интеллектуальные данные
- ПлатонДанные
- Точка
- должность
- возможность
- возможное
- мощностью
- Питание
- необходимость
- нажмите
- предотвращать
- предварительно
- проблемам
- Проект
- публиковать
- положил
- Радио
- получение
- Восстанавливает
- выздоровление
- выпуска
- остатки
- напоминающий
- в результате
- Итоги
- продолжить
- Показали
- Показывает
- робот
- робототехника
- Rover
- Сказал
- научный
- датчик
- сторона
- сигналы
- ситуация
- Склон
- небольшой
- меньше
- Software
- солнечный
- Солнечные батареи
- Солнечная энергия
- Sony
- Южная
- Space
- исследование космоса
- космический корабль
- Область
- заявил
- Области
- Станции
- Шаги
- Успешно
- Вс
- солнечный свет
- Поверхность
- выживать
- приняты
- цель
- команда
- Технический
- Технологии
- тестXNUMX
- который
- Ассоциация
- Будущее
- тогда
- Там.
- Эти
- они
- этой
- Четверг
- Таким образом
- время
- тип
- в
- приняли
- к
- игрушка
- суд
- Оказалось
- два
- На ходу
- единиц
- Университет
- вверх
- UTC
- автомобиль
- законопроект
- Wave
- были
- когда
- который
- в то время как
- будете
- в
- работает
- зефирнет