HELSINKI — Landerul SLIM al Japoniei și-a atins obiectivul de aterizare precisă pe Lună cu doar unul dintre cele două propulsoare principale în funcțiune, a declarat joi JAXA, în timp ce un mic rover a returnat o imagine a navei spațiale.
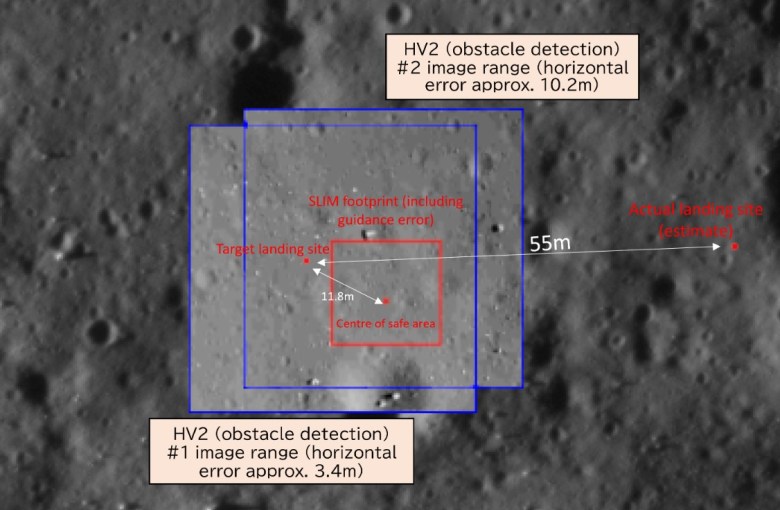
SLIM a efectuat o aterizare precisă la 25.24889 Est, 13.31549 Sud pe versantul craterului Shioli, la 55 de metri de punctul țintă, a declarat Shinichiro Sakai, managerul de proiect al echipei SLIM la JAXA, în timpul unei conferințe de presă joi dimineața (25 ianuarie), îndeplinind un criteriul cheie al misiunii.
Agenția a urmărit o aterizare de înaltă precizie, definită ca fiind la 100 de metri de punctul țintă.
SLIM și-a făcut aterizare istorică pe Lună 19 ianuarie, de asemenea, lansând cu succes o pereche de rovere mici pe suprafață chiar înainte de aterizare. Aterizarea SLIM a făcut Japonia a cincea țară care a aterizat pe Lună, dar problemele legate de generarea de energie au făcut ca timpul activ al navei spațiale la suprafață a fost incheiat prematur. Cu toate acestea, rămâne speranța că SLIM poate fi reactivat înainte de sfârșitul lunii.
Sakai a dezvăluit totuși că unul dintre cele două propulsoare principale a eșuat probabil în timpul fazei finale de aterizare. Acest lucru a avut loc de la o altitudine de 50 de metri până la aterizare, ducând la o mișcare laterală neintenționată deasupra.
„În aceste circumstanțe, software-ul de bord SLIM identifică în mod autonom anomalia și, controlând poziția orizontală cât mai mult posibil, SLIM a continuat coborârea cu celălalt motor și s-a deplasat treptat spre est.”
Aterizarea SLIM trebuia să aibă loc în două etape. Mai întâi cu propulsoarele de aterizare în jos, apoi un propulsor mai mic care trage pentru a înclina nava spațială pe o parte. SLIM este apoi amortizat de cinci picioare zdrobibile, imprimate 3D, din aluminiu.
O imagine a lui SLIM realizată de unul dintre rover, Robotul Lunar transformabil LEV-2, dezvăluie că nava spațială se află pe suprafața lunară, cu propulsorul îndreptat în sus. Cauza aparentei defecțiuni a motorului este în curs de investigare.
Atitudinea de aterizare a însemnat ca rețeaua solară SLIM să fie îndreptată spre vest, ceea ce a făcut ca inițial să nu primească lumina soarelui. Cu toate acestea, JAXA afirmă că există posibilitatea ca celulele solare să poată genera electricitate în timpul serii lunare, pe măsură ce iluminarea se îmbunătățește.
„Deși activitățile SLIM pe Lună erau de așteptat inițial să dureze doar câteva zile, pregătirile necesare pentru recuperare vor continua pentru a obține mai multe date tehnice și științifice”, declaraţie citire.
Situația amintește de aterizatorul Philae ca parte a misiunii Rosetta a Europei. Philae a sărit când a făcut încercarea de aterizare pe Cometa 67P în 2014. De asemenea, a avut probleme cu iluminarea înainte de a se trezi pentru scurt timp.
JAXA a declarat anterior că SLIM și-a deconectat bateria la 12%, așa cum era planificat, pentru a preveni descărcarea excesivă. SLIM s-a oprit la 12:57 est (1757 UTC) 19 ianuarie, la doar două ore și jumătate după aterizare la 10:20 est (1520 UTC).
Camera spectroscopică multibandă (MBC) montată pe SLIM a putut să funcționeze pe bază de probă și să captureze imagini înainte ca alimentarea să fie oprită. JAXA publicat o imagine MBC creată prin sintetizarea a 257 de imagini monocrome cu rezoluție joasă. MBC va fi pus în acțiune dacă SLIM se poate reactiva.
„Se pregătesc pentru a efectua cu promptitudine observații spectroscopice de înaltă rezoluție pe 10 benzi odată ce starea de iluminare solară se îmbunătățește și SLIM se recuperează de puterea generată de matricea solară”, a declarat JAXA.
Micul rover de 2.1 kilograme Lunar Excursion Vehicle (LEV-1) a desfășurat cu succes activități pe suprafața lunii, inclusiv a executat mișcări de sărituri planificate. LEV-1 a realizat o comunicare directă cu stațiile de la sol, inclusiv o transmisie de date radio cu unde radio de testare inter-roboți de la LEV-2. Achiziția imaginii de către LEV-1 nu a fost confirmată deocamdată, potrivit JAXA.
LEV-1 este în stare de așteptare pe suprafața lunară. „În timp ce capacitatea de a relua activitatea depinde de generarea de energie solară din schimbările direcției soarelui, vor fi menținute eforturi pentru a continua să primească semnale de la LEV-1”, a spus JAXA.
Roverul LEV-0.25 de dimensiunea unei mingi de baseball, de 2 kg, poreclit SORA-Q, a fost condus pe suprafața lunii și a fost fotografiat SLIM. „În prezent, analizăm alte date, inclusiv jurnalele de conducere și intenționăm să publicăm rezultatele în viitor”, a menționat JAXA într-un declaraţie pe rover.
LEV-2 a fost dezvoltat în comun de JAXA, Tomy, Sony și Universitatea Doshisha. Este cel mai mic și mai ușor rover lunar vreodată, conform JAXA.
„LEV-2 „SORA-Q”, care a fost dezvoltat combinând tehnologia jucăriilor, cea mai recentă tehnologie robotică cu senzori și tehnologia spațială JAXA și are caracteristici excelente de funcționare autonomă și de mișcare”, a declarat Kazuyuki Funaki, directorul centrului de inovare pentru explorarea spațială JAXA.
Apusul de soare peste craterul Shioli este așteptat în jurul orei UTC devreme pe 31 ianuarie. Nici SLIM, nici roverele sale nu au unități de încălzire cu radioizotopi. Astfel, nu se așteaptă ca aceștia să supraviețuiască nopții lunare, când temperaturile vor scădea la aproximativ minus 130 Celsius.
- Distribuție de conținut bazat pe SEO și PR. Amplifică-te astăzi.
- PlatoData.Network Vertical Generative Ai. Împuterniciți-vă. Accesați Aici.
- PlatoAiStream. Web3 Intelligence. Cunoștințe amplificate. Accesați Aici.
- PlatoESG. carbon, CleanTech, Energie, Mediu inconjurator, Solar, Managementul deșeurilor. Accesați Aici.
- PlatoHealth. Biotehnologie și Inteligență pentru studii clinice. Accesați Aici.
- Sursa: https://spacenews.com/japans-slim-achieved-pinpoint-moon-landing-with-just-one-working-engine/
- :are
- :este
- :nu
- ][p
- 1
- 10
- 100
- 12
- 13
- 130
- 19
- 20
- 2014
- 25
- 31
- 50
- a
- Capabil
- mai sus
- Conform
- precis
- realizat
- dobândi
- dobândite
- achiziție
- Acțiune
- activ
- activităţi de
- activitate
- După
- agenție
- vizează
- de asemenea
- an
- analiza
- și
- aparent
- SUNT
- în jurul
- Mulțime
- AS
- At
- încercare
- atitudine
- autonom
- autonom
- bază
- acumulator
- BE
- fost
- înainte
- fiind
- scurt
- dar
- by
- aparat foto
- CAN
- capacitate
- captura
- capturat
- transporta
- Provoca
- Celule
- Celsius
- Modificări
- Caracteristici
- împrejurări
- combinând
- Comunicare
- condiție
- Conduce
- efectuat
- Conferință
- CONFIRMAT
- continua
- a continuat
- controlul
- ţară
- a creat
- În prezent
- amortizat
- de date
- Zi
- definit
- dezvoltat
- direcționa
- direcţie
- Director
- decuplat
- jos
- condus
- conducere
- Picătură
- în timpul
- Devreme
- Est
- de est
- Eforturile
- electricitate
- capăt
- Motor
- Europes
- seară
- EVER
- excelent
- executat
- există
- de aşteptat
- explorare
- cu care se confruntă
- A eșuat
- puțini
- a cincea
- final
- aprindere
- First
- cinci
- Pentru
- din
- îndeplinirea
- mai mult
- viitor
- genera
- generată
- generaţie
- scop
- treptat
- Teren
- Jumătate
- Rezoluție înaltă
- speranţă
- Orizontală
- ORE
- Totuși
- HTML
- HTTPS
- Butuc
- identifică
- if
- imagine
- imagini
- îmbunătăţeşte
- in
- Inclusiv
- indian
- inițial
- Inovaţie
- destinate
- în
- probleme de
- IT
- ESTE
- Jan
- Japonia
- Japonia
- jpg
- doar
- doar unul
- Cheie
- Țară
- aterizare
- Nume
- Ultimele
- picioare
- Probabil
- Lunar
- făcut
- Principal
- Efectuarea
- manager
- max-width
- MBC
- a însemnat
- Misiune
- monocrom
- Lună
- Lună
- mişcare
- mutat
- mișcări
- mult
- Navigare
- necesar
- Nici
- nici
- notat
- acum
- observații
- avea loc
- of
- de pe
- on
- bord
- dată
- ONE
- afară
- funcionar
- de operare
- operaţie
- comandă
- iniţial
- Altele
- peste
- pereche
- parte
- fază
- poze
- Loc
- plan
- planificat
- Plato
- Informații despre date Platon
- PlatoData
- Punct
- poziţie
- posibilitate
- posibil
- putere
- alimentat
- precis
- presa
- împiedica
- în prealabil
- probleme
- proiect
- publica
- pune
- radio
- primire
- Recuperează
- recuperare
- eliberarea
- rămășițe
- reminiscență
- rezultând
- REZULTATE
- relua
- Dezvăluit
- dezvaluie
- robot
- robotica
- hoinar
- Said
- ştiinţific
- senzor
- parte
- semnalele
- situație
- Pantă
- mic
- mai mici
- Software
- solar
- Celule solare
- Solar de putere
- Sony
- Sud
- Spaţiu
- explorarea spațiului
- nave spaţiale
- Stat
- stabilit
- Statele
- Staţii
- paşi
- Reușit
- soare
- lumina soarelui
- Suprafață
- supravieţui
- luate
- Ţintă
- echipă
- Tehnic
- Tehnologia
- test
- acea
- Viitorul
- apoi
- Acolo.
- Acestea
- ei
- acest
- joi
- Prin urmare
- timp
- sfat
- la
- a luat
- față de
- jucărie
- proces
- transformat
- Două
- In curs
- de unităţi
- universitate
- în sus
- UTC
- vehicul
- a fost
- Val
- au fost
- cand
- care
- în timp ce
- voi
- cu
- în
- de lucru
- zephyrnet