Acasă > Anunturi > Omida robot demonstrează o nouă abordare a locomoției pentru robotica soft
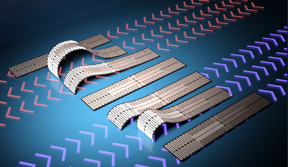 |
| Cercetătorii de la Universitatea de Stat din Carolina de Nord au demonstrat un robot moale asemănător unei omidă care se poate mișca înainte, înapoi și cufunda în spații înguste. Mișcarea robotului caterpillar este condusă de un model nou de nanofire de argint care utilizează căldura pentru a controla modul în care robotul se îndoaie, permițând utilizatorilor să direcționeze robotul în orice direcție. CREDIT Shuang Wu, Universitatea de Stat NC |
Rezumat:
Cercetătorii de la Universitatea de Stat din Carolina de Nord au demonstrat un robot moale asemănător unei omidă care se poate mișca înainte, înapoi și cufunda în spații înguste. Mișcarea robotului caterpillar este condusă de un model nou de nanofire de argint care utilizează căldura pentru a controla modul în care robotul se îndoaie, permițând utilizatorilor să direcționeze robotul în orice direcție.
Omida robot demonstrează o nouă abordare a locomoției pentru robotica soft
Durham, NC | Postat pe 24 martie 2023
„Mișcarea unei omidă este controlată de curbura locală a corpului său – corpul său se curbează diferit atunci când se trage înainte decât atunci când se împinge înapoi”, spune Yong Zhu, autorul corespondent al unei lucrări despre lucrare și Andrew A. Adams. Profesor distins de inginerie mecanică și aerospațială la NC State. „Ne-am inspirat din biomecanica omizii pentru a imita curbura locală și folosim încălzitoare cu nanofir pentru a controla curbura și mișcarea similare în caterpillar-bot.
„Conceperea roboților moi care se pot mișca în două direcții diferite este o provocare semnificativă în robotica soft”, spune Zhu. „Încălzitoarele cu nanofire încorporate ne permit să controlăm mișcarea robotului în două moduri. Putem controla ce secțiuni ale robotului se îndoaie controlând modelul de încălzire în robotul moale. Și putem controla măsura în care acele secțiuni se îndoaie controlând cantitatea de căldură aplicată.”
Caterpillar-bot constă din două straturi de polimer, care răspund diferit atunci când sunt expuse la căldură. Stratul inferior se micșorează sau se contractă atunci când este expus la căldură. Stratul superior se extinde atunci când este expus la căldură. Un model de nanofire de argint este încorporat în stratul în expansiune de polimer. Modelul include mai multe puncte de referință în care cercetătorii pot aplica un curent electric. Cercetătorii pot controla ce secțiuni ale modelului de nanofire se încălzesc prin aplicarea unui curent electric în diferite puncte de plumb și pot controla cantitatea de căldură aplicând mai mult sau mai puțin curent.
„Am demonstrat că caterpillar-bot este capabil să se tragă înainte și să se împingă înapoi”, spune Shuang Wu, primul autor al lucrării și cercetător postdoctoral la NC State. „În general, cu cât am aplicat mai mult curent, cu atât s-ar mișca mai repede în ambele direcții. Cu toate acestea, am descoperit că a existat un ciclu optim, care a dat timp polimerului să se răcească – permițând efectiv „mușchiului” să se relaxeze înainte de a se contracta din nou. Dacă am încercat să pedalăm cu omida-bot prea repede, corpul nu a avut timp să se „relaxeze” înainte de a se contracta din nou, ceea ce i-a afectat mișcarea.”
Cercetătorii au demonstrat, de asemenea, că mișcarea robotului-omidă ar putea fi controlată până la punctul în care utilizatorii au putut să-l direcționeze într-un spațiu foarte mic - similar cu ghidarea robotului pentru a aluneca sub o ușă. În esență, cercetătorii ar putea controla atât mișcarea înainte, cât și înapoi, precum și cât de sus s-a îndoit robotul în sus în orice moment al procesului.
„Această abordare a conducerii mișcării într-un robot moale este extrem de eficientă din punct de vedere energetic și suntem interesați să explorăm modalități prin care am putea face acest proces și mai eficient”, spune Zhu. „Pașii suplimentari următori includ integrarea acestei abordări a locomoției moale a robotului cu senzori sau alte tehnologii pentru utilizare în diverse aplicații – cum ar fi dispozitivele de căutare și salvare.”
Lucrarea, „Caterpillar-Inspired Soft Crawling Robot with Distributed Programable Thermal Actuation”, va fi publicată pe 22 martie în revista Science Advances. Lucrarea a fost co-autor de Jie Yin, profesor asociat de inginerie mecanică și aerospațială la NC State; Yaoye Hong, Ph.D. student la NC State; și de Yao Zhao, cercetător postdoctoral la NC State.
Lucrarea a fost realizată cu sprijinul Fundației Naționale de Știință, în cadrul granturilor 2122841, 2005374 și 2126072; și de la National Institutes of Health, sub grant numărul 1R01HD108473.
####
Pentru mai multe informații, faceți clic pe aici
Contacte:
Media Contact
Matt Shipman
Universitatea de Stat din Carolina de Nord
Contact expert
Yong Zhu
Universitatea de Stat din NC
Drepturi de autor © Universitatea de Stat din Carolina de Nord
Dacă aveți un comentariu, vă rog Contact ne.
Emitenții de comunicate de știri, nu 7th Wave, Inc. sau Nanotechnology Now, sunt singuri responsabili pentru acuratețea conținutului.
Bookmark:








| Link-uri conexe |
| Stiri conexe Presa |
Știri și informații
![]() Comutarea optică la viteze record deschide ușa pentru electronice și computere ultrarapide, bazate pe lumină: Martie 24th, 2023
Comutarea optică la viteze record deschide ușa pentru electronice și computere ultrarapide, bazate pe lumină: Martie 24th, 2023
![]() Rețeaua semiconductoare se căsătorește cu electronii și momentele magnetice Martie 24th, 2023
Rețeaua semiconductoare se căsătorește cu electronii și momentele magnetice Martie 24th, 2023
![]() Lumina se întâlnește cu învățarea profundă: calcul suficient de rapid pentru AI de nouă generație Martie 24th, 2023
Lumina se întâlnește cu învățarea profundă: calcul suficient de rapid pentru AI de nouă generație Martie 24th, 2023
![]() Electrolitul polimer solid ranforsat cu substrat PET/PVDF bistrat îmbunătățește performanța bateriei cu litiu metal în stare solidă Martie 24th, 2023
Electrolitul polimer solid ranforsat cu substrat PET/PVDF bistrat îmbunătățește performanța bateriei cu litiu metal în stare solidă Martie 24th, 2023
Robotica
![]() Fibrele nanostructurate pot imita mușchii umani 3rd iunie, 2022
Fibrele nanostructurate pot imita mușchii umani 3rd iunie, 2022
![]() Memoria formelor în rețele ierarhice – proprietatea uimitoare care permite manipularea materialelor de transformare cu rezoluții la scară micro Februarie 25th, 2022
Memoria formelor în rețele ierarhice – proprietatea uimitoare care permite manipularea materialelor de transformare cu rezoluții la scară micro Februarie 25th, 2022
Govt.-Legislatie / Regulament / Finanțare / Politica
![]() Noul experiment traduce informațiile cuantice între tehnologii într-un pas important pentru internetul cuantic Martie 24th, 2023
Noul experiment traduce informațiile cuantice între tehnologii într-un pas important pentru internetul cuantic Martie 24th, 2023
![]() Comutarea optică la viteze record deschide ușa pentru electronice și computere ultrarapide, bazate pe lumină: Martie 24th, 2023
Comutarea optică la viteze record deschide ușa pentru electronice și computere ultrarapide, bazate pe lumină: Martie 24th, 2023
![]() Rețeaua semiconductoare se căsătorește cu electronii și momentele magnetice Martie 24th, 2023
Rețeaua semiconductoare se căsătorește cu electronii și momentele magnetice Martie 24th, 2023
Futures posibile
![]() Noul experiment traduce informațiile cuantice între tehnologii într-un pas important pentru internetul cuantic Martie 24th, 2023
Noul experiment traduce informațiile cuantice între tehnologii într-un pas important pentru internetul cuantic Martie 24th, 2023
![]() Grafenul crește – și îl putem vedea Martie 24th, 2023
Grafenul crește – și îl putem vedea Martie 24th, 2023
![]() HKUMed inventează o nouă folie de nanofoi antibacteriene bidimensionale (2D) care răspunde la ultrasunete pentru a aborda eficient infecția țesutului osos Martie 24th, 2023
HKUMed inventează o nouă folie de nanofoi antibacteriene bidimensionale (2D) care răspunde la ultrasunete pentru a aborda eficient infecția țesutului osos Martie 24th, 2023
![]() O strategie universală de pulbere la pulbere cu asistent HCl pentru prepararea perovskiților fără plumb Martie 24th, 2023
O strategie universală de pulbere la pulbere cu asistent HCl pentru prepararea perovskiților fără plumb Martie 24th, 2023
descoperiri
![]() Noul experiment traduce informațiile cuantice între tehnologii într-un pas important pentru internetul cuantic Martie 24th, 2023
Noul experiment traduce informațiile cuantice între tehnologii într-un pas important pentru internetul cuantic Martie 24th, 2023
![]() Grafenul crește – și îl putem vedea Martie 24th, 2023
Grafenul crește – și îl putem vedea Martie 24th, 2023
![]() HKUMed inventează o nouă folie de nanofoi antibacteriene bidimensionale (2D) care răspunde la ultrasunete pentru a aborda eficient infecția țesutului osos Martie 24th, 2023
HKUMed inventează o nouă folie de nanofoi antibacteriene bidimensionale (2D) care răspunde la ultrasunete pentru a aborda eficient infecția țesutului osos Martie 24th, 2023
![]() O strategie universală de pulbere la pulbere cu asistent HCl pentru prepararea perovskiților fără plumb Martie 24th, 2023
O strategie universală de pulbere la pulbere cu asistent HCl pentru prepararea perovskiților fără plumb Martie 24th, 2023
anunturi
![]() Rețeaua semiconductoare se căsătorește cu electronii și momentele magnetice Martie 24th, 2023
Rețeaua semiconductoare se căsătorește cu electronii și momentele magnetice Martie 24th, 2023
![]() Lumina se întâlnește cu învățarea profundă: calcul suficient de rapid pentru AI de nouă generație Martie 24th, 2023
Lumina se întâlnește cu învățarea profundă: calcul suficient de rapid pentru AI de nouă generație Martie 24th, 2023
![]() Electrolitul polimer solid ranforsat cu substrat PET/PVDF bistrat îmbunătățește performanța bateriei cu litiu metal în stare solidă Martie 24th, 2023
Electrolitul polimer solid ranforsat cu substrat PET/PVDF bistrat îmbunătățește performanța bateriei cu litiu metal în stare solidă Martie 24th, 2023
![]() Înțelegerea mecanismului de formare neuniformă a peliculei de diamant pe unelte: deschiderea drumului către un proces uscat cu un impact mai mic asupra mediului Martie 24th, 2023
Înțelegerea mecanismului de formare neuniformă a peliculei de diamant pe unelte: deschiderea drumului către un proces uscat cu un impact mai mic asupra mediului Martie 24th, 2023
Interviuri / Recenzii de carte / Eseuri / Rapoarte / Podcasturi / Jurnale / Lucrări albe / Afise
![]() HKUMed inventează o nouă folie de nanofoi antibacteriene bidimensionale (2D) care răspunde la ultrasunete pentru a aborda eficient infecția țesutului osos Martie 24th, 2023
HKUMed inventează o nouă folie de nanofoi antibacteriene bidimensionale (2D) care răspunde la ultrasunete pentru a aborda eficient infecția țesutului osos Martie 24th, 2023
![]() O strategie universală de pulbere la pulbere cu asistent HCl pentru prepararea perovskiților fără plumb Martie 24th, 2023
O strategie universală de pulbere la pulbere cu asistent HCl pentru prepararea perovskiților fără plumb Martie 24th, 2023
![]() Comutarea optică la viteze record deschide ușa pentru electronice și computere ultrarapide, bazate pe lumină: Martie 24th, 2023
Comutarea optică la viteze record deschide ușa pentru electronice și computere ultrarapide, bazate pe lumină: Martie 24th, 2023
![]() Rețeaua semiconductoare se căsătorește cu electronii și momentele magnetice Martie 24th, 2023
Rețeaua semiconductoare se căsătorește cu electronii și momentele magnetice Martie 24th, 2023
- Distribuție de conținut bazat pe SEO și PR. Amplifică-te astăzi.
- Platoblockchain. Web3 Metaverse Intelligence. Cunoștințe amplificate. Accesați Aici.
- Sursa: http://www.nanotech-now.com/news.cgi?story_id=57319
- :este
- $UP
- 10
- 2D
- 8
- a
- Capabil
- precizie
- adaptare
- adresa
- avans
- Industria aerospațială
- inginerie aerospatiala
- Permiterea
- permite
- sumă
- și
- Andrew
- aplicatii
- aplicat
- Aplică
- Aplicarea
- abordare
- SUNT
- artificial
- AS
- Avocat Colaborator
- At
- autor
- Bacteriile
- acumulator
- BE
- înainte
- fiind
- între
- sânge
- corp
- OS
- De jos
- by
- CAN
- capabil
- Centru
- CGI
- contesta
- mai ieftin
- clic
- COM
- comentariu
- Comunicații
- Calculatoare
- tehnica de calcul
- conţinut
- contractant
- contracte
- Control
- controlată
- controlul
- Rece
- Corespunzător
- ar putea
- credit
- Curent
- ciclu
- adânc
- învățare profundă
- demonstrat
- demonstrează
- dezvolta
- dispozitiv
- Dispozitive
- Diamant
- FĂCUT
- diferit
- Dip
- direcţie
- traseu
- Distins
- distribuite
- De
- elaborate
- condus
- conducere
- se usuce
- în mod eficient
- eficient
- oricare
- electric
- Componente electronice
- electroni
- încorporat
- nesfârșit
- energie
- Inginerie
- suficient de
- de mediu
- esenţă
- Eter (ETH)
- Chiar
- existent
- extinderea
- se extinde
- experiment
- Explorarea
- expus
- FAST
- mai repede
- februarie
- fibre
- Film
- First
- Pentru
- formare
- Înainte
- găsit
- Fundație
- din
- decalaj
- General
- gif
- acordarea
- subvenții
- creste
- Avea
- Sănătate
- Înalt
- extrem de
- Hong
- Cum
- Cat de sus
- Totuși
- http
- HTTPS
- uman
- identifica
- Idle
- Imaging
- important
- îmbunătăţeşte
- in
- Inc
- include
- include
- informații
- inovatoare
- Inspiraţie
- inspirat
- integrarea
- interesat
- IT
- ESTE
- în sine
- jurnal
- iulie
- strat
- straturi
- conduce
- Conduce
- învăţare
- Link-uri
- litiu
- local
- Jos
- face
- Manipulare
- Martie
- Materiale
- mecanic
- mecanism
- medical
- dispozitive medicale
- se intalneste
- Memorie
- metal
- mai mult
- mai eficient
- mişcare
- Propuneri
- muta
- mergi inainte
- mişcare
- multiplu
- nanotehnologie
- național
- National Institutes of Health
- Știința Națională
- Natură
- Statul NC
- NCSU
- net
- rețele
- Nou
- ştiri
- următor
- North
- carolina de nord
- roman
- număr
- of
- Vechi
- on
- deschide
- optimă
- comenzilor
- Altele
- Hârtie
- Model
- Pavaj
- efectua
- PHP
- Plato
- Informații despre date Platon
- PlatoData
- "vă rog"
- la care se adauga
- Punct
- puncte
- polimer
- Post
- postat
- putere
- pregătirea
- proces
- Profesor
- proprietate
- publicat
- trăgând
- Trage
- împingerea
- Cuantic
- informație cuantică
- repede
- record
- Relaxa
- Lansări
- cercetător
- cercetători
- Răspunde
- responsabil
- reveni
- robot
- robotica
- roboţi
- Economisiți
- spune
- Scară
- Ştiinţă
- Caută
- secțiuni
- senzori
- Distribuie
- semnificativ
- Silver
- asemănător
- simplu
- Moale
- solid
- spații
- viteze
- Loc
- Începe
- Stat
- Pas
- paşi
- Strategie
- student
- prezenta
- astfel de
- a sustine
- sistem
- Tehnologii
- Tehnologia
- acea
- termic
- timp
- la
- de asemenea
- Unelte
- top
- twist
- în
- Universal
- universitate
- în sus
- us
- utilizare
- utilizatorii
- diverse
- Val
- Cale..
- modalități de
- BINE
- care
- voi
- cu
- Apartamente
- ar
- wu
- Yahoo
- zephyrnet
- Zhao