HELSINQUE – O módulo de pouso SLIM do Japão atingiu seu objetivo de um pouso preciso na Lua com apenas um dos dois propulsores principais operando, afirmou a JAXA na quinta-feira, enquanto um pequeno veículo espacial retornava uma imagem da espaçonave.
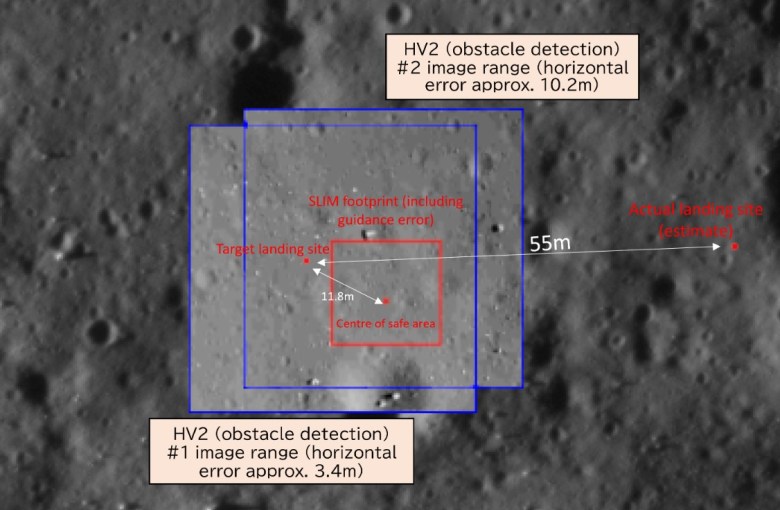
SLIM fez um pouso preciso em 25.24889 Leste, 13.31549 Sul na encosta da cratera Shioli, a 55 metros do ponto alvo, disse Shinichiro Sakai, gerente de projeto da equipe SLIM na JAXA, durante uma entrevista coletiva na manhã de quinta-feira (25 de janeiro), cumprindo um critério-chave da missão.
A agência pretendia um pouso de alta precisão, definido como sendo a 100 metros do ponto alvo.
SLIM fez a sua pouso lunar histórico 19 de janeiro, também liberando com sucesso um par de pequenos rovers na superfície pouco antes do pouso. O pouso SLIM fez do Japão o quinto país a pousar na Lua, mas problemas com a geração de energia fizeram com que o tempo ativo da espaçonave na superfície fosse reduzido. encurtada. No entanto, permanece a esperança de que o SLIM possa ser reativado antes do final do mês.
Sakai revelou, no entanto, que um dos dois propulsores principais provavelmente falhou durante a fase final de pouso. Isso ocorreu a partir de uma altitude de 50 metros até o toque, resultando em movimento lateral não intencional acima.
“Nestas circunstâncias, o software de bordo do SLIM identifica autonomamente a anomalia e, ao mesmo tempo que controla a posição horizontal tanto quanto possível, o SLIM continua a descida com o outro motor e move-se gradualmente para leste.”
O pouso do SLIM deveria ocorrer em duas etapas. Primeiro com os propulsores de pouso abaixados, depois um propulsor menor disparando para inclinar a espaçonave para o lado. SLIM é então amortecido por cinco pernas de aterrissagem de treliça de alumínio impressas em 3D quebráveis.
Uma imagem do SLIM tirada por um dos rovers, Transformable Lunar Robot LEV-2, revela que a espaçonave está na superfície lunar com seu propulsor apontando para cima. A causa do aparente mau funcionamento do motor está sendo investigada.
A atitude de pouso significava que o painel solar do SLIM estava voltado para oeste, fazendo com que inicialmente não recebesse luz solar. No entanto, a JAXA afirma que existe a possibilidade de as células solares gerarem eletricidade durante a noite lunar à medida que a iluminação melhora.
“Embora originalmente se esperasse que as atividades do SLIM na Lua durassem apenas alguns dias, os preparativos necessários para a recuperação continuarão a fim de adquirir mais dados técnicos e científicos”, disse um comunicado. afirmação ler.
A situação é uma reminiscência da sonda Philae como parte da missão europeia Rosetta. Philae saltou ao fazer sua tentativa de pouso no cometa 67P em 2014. Ele também sofreu problemas de iluminação antes de despertar brevemente.
A JAXA afirmou anteriormente que o SLIM desconectou a bateria em 12%, conforme planejado, para evitar descarga excessiva. O SLIM desligou às 12h57 Leste (1757 UTC) de 19 de janeiro, apenas duas horas e meia após pousar às 10h20 Leste (1520 UTC).
A câmera espectroscópica multibanda (MBC) montada no SLIM foi capaz de operar em caráter experimental e capturar imagens antes que a energia fosse desligada. JAXA publicado uma imagem MBC criada pela síntese de 257 imagens monocromáticas de baixa resolução. O MBC entrará em ação se o SLIM puder ser reativado.
“Está em andamento a preparação para conduzir prontamente observações espectroscópicas de alta resolução de 10 bandas assim que a condição de iluminação solar melhorar e o SLIM se recuperar pela energia gerada pelo painel solar”, afirmou JAXA.
O pequeno veículo espacial de excursão lunar de 2.1 quilogramas (LEV-1) conduziu com sucesso atividades na superfície lunar, incluindo movimentos de salto planejados. O LEV-1 alcançou comunicação direta com estações terrestres, incluindo um teste de transmissão de dados de ondas de rádio entre robôs do LEV-2. A aquisição de imagens pelo LEV-1 ainda não foi confirmada, de acordo com a JAXA.
LEV-1 está em estado de espera na superfície lunar. “Embora a capacidade de retomar a atividade exista dependendo da geração de energia solar a partir de mudanças na direção do sol, os esforços serão mantidos para continuar recebendo sinais do LEV-1”, disse a JAXA.
O rover LEV-0.25 do tamanho de uma bola de beisebol e 2 kg, apelidado de SORA-Q, foi conduzido na superfície lunar e fotografado como SLIM. “Atualmente estamos analisando outros dados, incluindo registros de condução, e planejamos publicar os resultados no futuro”, observou a JAXA em um comunicado. afirmação no veículo espacial.
LEV-2 foi desenvolvido em conjunto pela JAXA, Tomy, Sony e Doshisha University. É o menor e mais leve rover lunar de todos os tempos, de acordo com a JAXA.
“O LEV-2 “SORA-Q”, que foi desenvolvido combinando tecnologia de brinquedo, a mais recente tecnologia de robótica de sensores e a tecnologia espacial da JAXA, e possui excelentes características de operação e movimento autônomos”, disse o diretor do Centro de Inovação de Exploração Espacial da JAXA, Kazuyuki Funaki.
O pôr do sol sobre a cratera Shioli é esperado por volta do início do dia UTC de 31 de janeiro. Nem o SLIM nem seus rovers carregam unidades de aquecimento de radioisótopos. Assim, não se espera que sobrevivam à noite lunar, quando as temperaturas cairão para cerca de 130 graus Celsius negativos.
- Conteúdo com tecnologia de SEO e distribuição de relações públicas. Seja amplificado hoje.
- PlatoData.Network Gerativa Vertical Ai. Capacite-se. Acesse aqui.
- PlatoAiStream. Inteligência Web3. Conhecimento Amplificado. Acesse aqui.
- PlatãoESG. Carbono Tecnologia Limpa, Energia, Ambiente, Solar, Gestão de resíduos. Acesse aqui.
- PlatoHealth. Inteligência em Biotecnologia e Ensaios Clínicos. Acesse aqui.
- Fonte: https://spacenews.com/japans-slim-achieved-pinpoint-moon-landing-with-just-one-working-engine/
- :tem
- :é
- :não
- ][p
- 1
- 10
- 100
- 12
- 13
- 130
- 19
- 20
- 2014
- 25
- 31
- 50
- a
- Capaz
- acima
- Segundo
- preciso
- alcançado
- adquirir
- adquirido
- aquisição
- Açao Social
- ativo
- atividades
- atividade
- Depois de
- agência
- Destinado
- tb
- an
- análise
- e
- aparente
- SOMOS
- por aí
- Ordem
- AS
- At
- tentativa
- atitude
- Autônomo
- autonomamente
- base
- bateria
- BE
- sido
- antes
- ser
- brevemente
- mas a
- by
- Câmera
- CAN
- capacidade
- capturar
- capturados
- transportar
- Causar
- Células
- Celsius
- Alterações
- características
- circunstâncias
- combinando
- Comunicação
- condição
- Conduzir
- conduzido
- Conferência
- CONFIRMADO
- continuar
- continuou
- controle
- país
- criado
- Atualmente
- almofadado
- dados,
- dias
- definido
- desenvolvido
- diretamente
- direção
- Diretor
- desligado
- down
- dirigido
- condução
- Cair
- durante
- Cedo
- Leste
- oriental
- esforços
- eletricidade
- final
- Motor
- Europas
- noite
- SEMPRE
- excelente
- executado
- existe
- esperado
- exploração
- enfrentando
- fracassado
- poucos
- quinto
- final
- acendimento
- Primeiro nome
- cinco
- Escolha
- da
- cumprimento
- mais distante
- futuro
- gerar
- gerado
- geração
- meta
- gradualmente
- Solo
- Metade
- de alta resolução
- esperança
- Horizontal
- HORÁRIO
- Contudo
- HTML
- HTTPS
- Hub
- identifica
- if
- imagem
- imagens
- melhora
- in
- Incluindo
- indiano
- inicialmente
- Inovação
- Pretendido
- para dentro
- questões
- IT
- ESTÁ
- Jan
- Japão
- Japão
- jpg
- apenas por
- apenas um
- Chave
- Terreno
- aterrissagem
- Sobrenome
- mais recente
- pernas
- Provável
- Lunar
- moldadas
- a Principal
- Fazendo
- Gerente
- max-width
- MBC
- significava
- Missão
- monocromático
- Mês
- Moon
- movimento
- movido
- movimentos
- muito
- Navegação
- necessário
- Nem
- nem
- notado
- agora
- observações
- ocorrer
- of
- WOW!
- on
- A bordo
- uma vez
- ONE
- só
- operar
- operando
- operação
- ordem
- originalmente
- Outros
- Acima de
- par
- parte
- fase
- FOTOS
- Lugar
- plano
- planejado
- platão
- Inteligência de Dados Platão
- PlatãoData
- ponto
- posição
- possibilidade
- possível
- poder
- alimentado
- preciso
- imprensa
- evitar
- anteriormente
- problemas
- projeto
- publicar
- colocar
- Rádio
- receber
- Recupera
- recuperação
- liberação
- permanece
- que faz lembrar
- resultando
- Resultados
- currículo
- Revelado
- revela
- robô
- robótica
- vagabundo
- Dito
- científico
- sensor
- lado
- sinais
- situação
- Declive
- pequeno
- menor
- Software
- solar
- Células solares
- Energia Solar
- Sony
- Sul
- Espaço
- exploração espacial
- veículo espacial
- Estado
- estabelecido
- Unidos
- Estações
- Passos
- entraram com sucesso
- Espreguiçadeiras
- luz solar
- superfície
- sobreviver
- tomado
- Target
- Profissionais
- Dados Técnicos:
- Equipar
- teste
- que
- A
- O Futuro
- então
- Lá.
- Este
- deles
- isto
- quinta-feira
- Assim
- tempo
- tipo
- para
- levou
- para
- brinquedo
- julgamento
- Virado
- dois
- a caminho
- unidades
- universidade
- para cima
- UTC
- veículo
- foi
- Onda
- foram
- quando
- qual
- enquanto
- precisarão
- de
- dentro
- trabalhar
- zefirnet