Início > Press > A lagarta do robô demonstra uma nova abordagem de locomoção para robótica leve
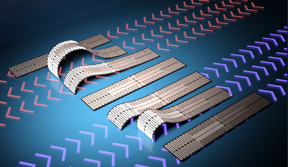 |
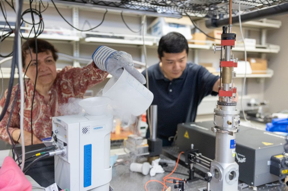
| Pesquisadores da North Carolina State University demonstraram um robô macio semelhante a uma lagarta que pode se mover para frente, para trás e mergulhar em espaços estreitos. O movimento do robô-lagarta é impulsionado por um novo padrão de nanofios de prata que usam o calor para controlar a maneira como o robô se dobra, permitindo que os usuários dirijam o robô em qualquer direção. CRÉDITO Shuang Wu, Universidade Estadual da Carolina do Norte |
Abstrato:
Pesquisadores da North Carolina State University demonstraram um robô macio semelhante a uma lagarta que pode se mover para frente, para trás e mergulhar em espaços estreitos. O movimento do robô-lagarta é impulsionado por um novo padrão de nanofios de prata que usam o calor para controlar a maneira como o robô se dobra, permitindo que os usuários conduzam o robô em qualquer direção.
Lagarta-robô demonstra nova abordagem de locomoção para robótica leve
Durham, Carolina do Norte | Postado em 24 de março de 2023
“O movimento de uma lagarta é controlado pela curvatura local de seu corpo – seu corpo se curva de maneira diferente quando ela se puxa para frente do que quando se empurra para trás”, diz Yong Zhu, autor correspondente de um artigo sobre o trabalho e o Andrew A. Adams Distinguished Professor de Engenharia Mecânica e Aeroespacial na NC State. “Inspiramo-nos na biomecânica da lagarta para imitar essa curvatura local e usamos aquecedores de nanofios para controlar curvatura e movimento semelhantes no bot-lagarta.
“A engenharia de robôs leves que podem se mover em duas direções diferentes é um desafio significativo na robótica leve”, diz Zhu. “Os aquecedores de nanofios embutidos nos permitem controlar o movimento do robô de duas maneiras. Podemos controlar quais seções do robô dobram controlando o padrão de aquecimento no robô macio. E podemos controlar até que ponto essas seções se dobram controlando a quantidade de calor que está sendo aplicada.”
O bot-lagarta consiste em duas camadas de polímero, que respondem de maneira diferente quando expostas ao calor. A camada inferior encolhe, ou se contrai, quando exposta ao calor. A camada superior se expande quando exposta ao calor. Um padrão de nanofios de prata está embutido na camada de polímero em expansão. O padrão inclui vários pontos de chumbo onde os pesquisadores podem aplicar uma corrente elétrica. Os pesquisadores podem controlar quais seções do padrão de nanofios aquecem aplicando uma corrente elétrica a diferentes pontos de chumbo e podem controlar a quantidade de calor aplicando mais ou menos corrente.
“Demonstramos que a lagarta-robô é capaz de se puxar para frente e se empurrar para trás”, diz Shuang Wu, primeiro autor do artigo e pesquisador de pós-doutorado na NC State. “Em geral, quanto mais corrente aplicamos, mais rápido ele se move em qualquer direção. No entanto, descobrimos que havia um ciclo ideal, que dava tempo ao polímero para esfriar – efetivamente permitindo que o 'músculo' relaxasse antes de se contrair novamente. Se tentássemos ciclar o robô-lagarta muito rapidamente, o corpo não teria tempo para 'relaxar' antes de se contrair novamente, o que prejudicava seu movimento.”
Os pesquisadores também demonstraram que o movimento do robô-lagarta pode ser controlado a ponto de os usuários serem capazes de conduzi-lo por um espaço muito baixo – semelhante a guiar o robô para passar por baixo de uma porta. Em essência, os pesquisadores puderam controlar o movimento para frente e para trás, bem como a altura em que o robô se inclinava para cima em qualquer ponto desse processo.
“Essa abordagem para conduzir o movimento em um robô macio é altamente eficiente em termos de energia e estamos interessados em explorar maneiras de tornar esse processo ainda mais eficiente”, diz Zhu. “Os próximos passos adicionais incluem a integração dessa abordagem à locomoção de robôs macios com sensores ou outras tecnologias para uso em várias aplicações – como dispositivos de busca e resgate”.
O artigo, “Robô de rastreamento macio inspirado na Caterpillar com atuação térmica programável distribuída”, será publicado em 22 de março na revista Science Advances. O papel foi co-autoria de Jie Yin, um professor associado de engenharia mecânica e aeroespacial na NC State; Yaoye Hong, um Ph.D. estudante na NC State; e por Yao Zhao, pesquisador de pós-doutorado na NC State.
O trabalho foi realizado com o apoio da National Science Foundation, sob as bolsas 2122841, 2005374 e 2126072; e do National Institutes of Health, sob o número de concessão 1R01HD108473.
####
Para mais informações, por favor clique SUA PARTICIPAÇÃO FAZ A DIFERENÇA
Contactos:
Contato com a mídia
Matt Shipman
Universidade Estadual da Carolina do Norte
Contato do especialista
Yong Zhu
NC State University
Copyright © Universidade Estadual da Carolina do Norte
Se você tiver um comentário, por favor Contato nós.
Os emissores de boletins de notícias, não a 7th Wave, Inc. ou Nanotechnology Now, são os únicos responsáveis pela precisão do conteúdo.
Marca páginas:








| Links Relacionados |
| Notícias Relacionadas |
Notícias e informações
![]() A comutação óptica em velocidades recordes abre portas para eletrônicos e computadores baseados em luz ultrarrápidos: Março 24th, 2023
A comutação óptica em velocidades recordes abre portas para eletrônicos e computadores baseados em luz ultrarrápidos: Março 24th, 2023
![]() Rede semicondutora casa elétrons e momentos magnéticos Março 24th, 2023
Rede semicondutora casa elétrons e momentos magnéticos Março 24th, 2023
![]() A luz encontra o aprendizado profundo: computação rápida o suficiente para IA de última geração Março 24th, 2023
A luz encontra o aprendizado profundo: computação rápida o suficiente para IA de última geração Março 24th, 2023
![]() O eletrólito de polímero sólido reforçado com substrato PET/PVDF de duas camadas melhora o desempenho da bateria de metal de lítio de estado sólido Março 24th, 2023
O eletrólito de polímero sólido reforçado com substrato PET/PVDF de duas camadas melhora o desempenho da bateria de metal de lítio de estado sólido Março 24th, 2023
Robótica
![]() Fibras nanoestruturadas podem se passar por músculos humanos Junho 3rd, 2022
Fibras nanoestruturadas podem se passar por músculos humanos Junho 3rd, 2022
![]() Memória de forma em redes hierárquicas – a propriedade surpreendente que permite a manipulação de materiais morphing com resoluções de microescala 25 de fevereiro de 2022
Memória de forma em redes hierárquicas – a propriedade surpreendente que permite a manipulação de materiais morphing com resoluções de microescala 25 de fevereiro de 2022
Legislação Governamental / Regulamento / Financiamento / Política
![]() Novo experimento traduz informações quânticas entre tecnologias em um passo importante para a internet quântica Março 24th, 2023
Novo experimento traduz informações quânticas entre tecnologias em um passo importante para a internet quântica Março 24th, 2023
![]() A comutação óptica em velocidades recordes abre portas para eletrônicos e computadores baseados em luz ultrarrápidos: Março 24th, 2023
A comutação óptica em velocidades recordes abre portas para eletrônicos e computadores baseados em luz ultrarrápidos: Março 24th, 2023
![]() Rede semicondutora casa elétrons e momentos magnéticos Março 24th, 2023
Rede semicondutora casa elétrons e momentos magnéticos Março 24th, 2023
Possíveis Futuros
![]() Novo experimento traduz informações quânticas entre tecnologias em um passo importante para a internet quântica Março 24th, 2023
Novo experimento traduz informações quânticas entre tecnologias em um passo importante para a internet quântica Março 24th, 2023
![]() O grafeno cresce – e podemos vê-lo Março 24th, 2023
O grafeno cresce – e podemos vê-lo Março 24th, 2023
![]() A HKUMed inventa uma nova nanofolha antibacteriana bidimensional (2D) responsiva a ultrassom para abordar com eficácia a infecção do tecido ósseo Março 24th, 2023
A HKUMed inventa uma nova nanofolha antibacteriana bidimensional (2D) responsiva a ultrassom para abordar com eficácia a infecção do tecido ósseo Março 24th, 2023
![]() Uma estratégia universal de pó a pó assistente de HCl para preparar perovskitas sem chumbo Março 24th, 2023
Uma estratégia universal de pó a pó assistente de HCl para preparar perovskitas sem chumbo Março 24th, 2023
Descobertas
![]() Novo experimento traduz informações quânticas entre tecnologias em um passo importante para a internet quântica Março 24th, 2023
Novo experimento traduz informações quânticas entre tecnologias em um passo importante para a internet quântica Março 24th, 2023
![]() O grafeno cresce – e podemos vê-lo Março 24th, 2023
O grafeno cresce – e podemos vê-lo Março 24th, 2023
![]() A HKUMed inventa uma nova nanofolha antibacteriana bidimensional (2D) responsiva a ultrassom para abordar com eficácia a infecção do tecido ósseo Março 24th, 2023
A HKUMed inventa uma nova nanofolha antibacteriana bidimensional (2D) responsiva a ultrassom para abordar com eficácia a infecção do tecido ósseo Março 24th, 2023
![]() Uma estratégia universal de pó a pó assistente de HCl para preparar perovskitas sem chumbo Março 24th, 2023
Uma estratégia universal de pó a pó assistente de HCl para preparar perovskitas sem chumbo Março 24th, 2023
Anúncios
![]() Rede semicondutora casa elétrons e momentos magnéticos Março 24th, 2023
Rede semicondutora casa elétrons e momentos magnéticos Março 24th, 2023
![]() A luz encontra o aprendizado profundo: computação rápida o suficiente para IA de última geração Março 24th, 2023
A luz encontra o aprendizado profundo: computação rápida o suficiente para IA de última geração Março 24th, 2023
![]() O eletrólito de polímero sólido reforçado com substrato PET/PVDF de duas camadas melhora o desempenho da bateria de metal de lítio de estado sólido Março 24th, 2023
O eletrólito de polímero sólido reforçado com substrato PET/PVDF de duas camadas melhora o desempenho da bateria de metal de lítio de estado sólido Março 24th, 2023
![]() Entendendo o mecanismo de formação não uniforme do filme de diamante nas ferramentas: abrindo caminho para um processo a seco com menor impacto ambiental Março 24th, 2023
Entendendo o mecanismo de formação não uniforme do filme de diamante nas ferramentas: abrindo caminho para um processo a seco com menor impacto ambiental Março 24th, 2023
Entrevistas / Resenhas / Ensaios / Relatórios / Podcasts / Revistas / White papers / Cartazes
![]() A HKUMed inventa uma nova nanofolha antibacteriana bidimensional (2D) responsiva a ultrassom para abordar com eficácia a infecção do tecido ósseo Março 24th, 2023
A HKUMed inventa uma nova nanofolha antibacteriana bidimensional (2D) responsiva a ultrassom para abordar com eficácia a infecção do tecido ósseo Março 24th, 2023
![]() Uma estratégia universal de pó a pó assistente de HCl para preparar perovskitas sem chumbo Março 24th, 2023
Uma estratégia universal de pó a pó assistente de HCl para preparar perovskitas sem chumbo Março 24th, 2023
![]() A comutação óptica em velocidades recordes abre portas para eletrônicos e computadores baseados em luz ultrarrápidos: Março 24th, 2023
A comutação óptica em velocidades recordes abre portas para eletrônicos e computadores baseados em luz ultrarrápidos: Março 24th, 2023
![]() Rede semicondutora casa elétrons e momentos magnéticos Março 24th, 2023
Rede semicondutora casa elétrons e momentos magnéticos Março 24th, 2023
- Conteúdo com tecnologia de SEO e distribuição de relações públicas. Seja amplificado hoje.
- Platoblockchain. Inteligência Metaverso Web3. Conhecimento Ampliado. Acesse aqui.
- Fonte: http://www.nanotech-now.com/news.cgi?story_id=57319
- :é
- $UP
- 10
- 2D
- 8
- a
- Capaz
- precisão
- adaptação
- endereço
- avanços
- Indústria aeroespacial
- Engenharia aeroespacial
- Permitindo
- permite
- quantidade
- e
- Andrew
- aplicações
- aplicado
- Aplicar
- Aplicando
- abordagem
- SOMOS
- artificial
- AS
- Jurídico
- At
- autor
- Bactérias
- bateria
- BE
- antes
- ser
- entre
- sangue
- corpo
- OSSO
- Inferior
- by
- CAN
- capaz
- Centralização de
- CGI
- desafiar
- mais barato
- clique
- COM
- comentar
- Comunicações
- computadores
- computação
- conteúdo
- contratante
- contratos
- ao controle
- controlado
- controle
- Legal
- Correspondente
- poderia
- crédito
- Atual
- ciclo
- profundo
- deep learning
- demonstraram
- demonstra
- desenvolver
- dispositivo
- Dispositivos/Instrumentos
- Diamante
- DID
- diferente
- Mergulhe
- direção
- instruções
- Distinto
- distribuído
- Porta
- desenhado
- dirigido
- condução
- secar
- efetivamente
- eficiente
- ou
- Elétrico
- Eletrônicos
- elétrons
- incorporado
- interminavelmente
- energia
- Engenharia
- suficiente
- ambiental
- essência
- Éter (ETH)
- Mesmo
- existente
- expansão
- expande
- experimentar
- Explorando
- exposto
- RÁPIDO
- mais rápido
- Fevereiro
- fibras
- Filme
- Primeiro nome
- Escolha
- treinamento
- para a frente
- encontrado
- Foundation
- da
- lacuna
- Geral
- gif
- conceder
- subsídios
- Cresce
- Ter
- Saúde
- Alta
- altamente
- Hong
- Como funciona o dobrador de carta de canal
- How High
- Contudo
- http
- HTTPS
- humano
- identificar
- inativo
- Imagiologia
- importante
- melhora
- in
- Inc.
- incluir
- inclui
- INFORMAÇÕES
- inovadores
- Inspiração
- inspirado
- Integração
- interessado
- IT
- ESTÁ
- se
- revista
- Julho
- camada
- camadas
- conduzir
- Leads
- aprendizagem
- Links
- lítio
- local
- Baixo
- fazer
- Manipulação
- Março
- materiais
- mecânico
- mecanismo
- médico
- dispositivos médicos
- atende
- Memória
- metal
- mais
- mais eficiente
- movimento
- Moções
- mover
- Siga em frente
- movimento
- múltiplo
- nanotecnologia
- Nacional
- National Institutes of Health
- Ciência Nacional
- Natureza
- Estado NC
- NCSU
- líquido
- redes
- Novo
- notícias
- Próximo
- Norte
- Carolina do Norte
- romance
- número
- of
- Velho
- on
- abre
- ideal
- ordens
- Outros
- Papel
- padrão
- Pavimentação
- realizar
- PHP
- platão
- Inteligência de Dados Platão
- PlatãoData
- por favor
- mais
- ponto
- pontos
- polímero
- Publique
- publicado
- poder
- preparação
- processo
- Professor
- propriedade
- publicado
- puxando
- Pullover
- Empurrando
- Quantum
- informação quântica
- rapidamente
- registro
- Relax
- Releases
- investigador
- pesquisadores
- Responder
- responsável
- retorno
- robô
- robótica
- robôs
- Salvar
- diz
- Escala
- Ciência
- Pesquisar
- seções
- sensor
- Partilhar
- periodo
- Prata
- semelhante
- simples
- Suave
- sólido
- espaços
- velocidades
- Spot
- começo
- Estado
- Passo
- Passos
- Estratégia
- estudante
- enviar
- tal
- ajuda
- .
- Tecnologias
- Tecnologia
- que
- A
- térmico
- tempo
- para
- também
- ferramentas
- topo
- torção
- para
- Universal
- universidade
- para cima
- us
- usar
- usuários
- vário
- Onda
- Caminho..
- maneiras
- BEM
- qual
- precisarão
- de
- Atividades:
- seria
- wu
- Yahoo
- zefirnet
- Zhao