HELSINKI — Japan’s SLIM lander achieved its goal of an accurate moon landing moon with only one of two main thrusters operating, JAXA stated Thursday, while a small rover returned an image of the spacecraft.
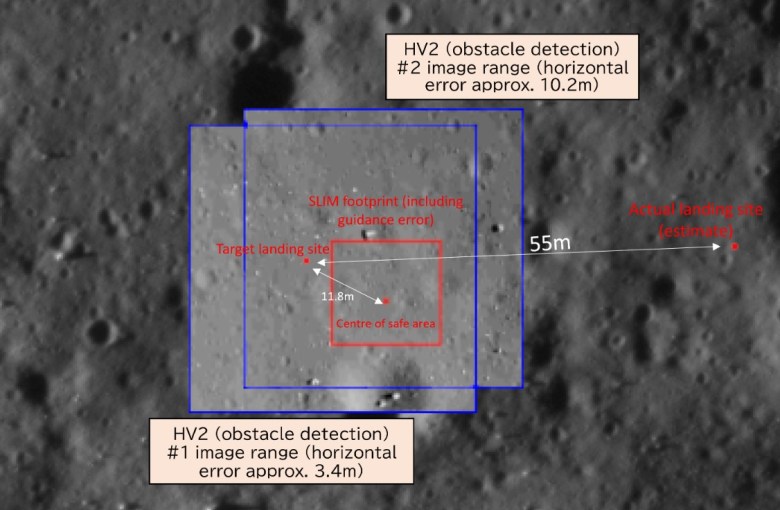
SLIM made a precise landing at 25.24889 East, 13.31549 South on the slope of Shioli crater, 55 meters from the target point, Shinichiro Sakai, SLIM team project manager at JAXA, said during a press conference early Thursday (Jan. 25), fulfilling a key mission criterion.
The agency aimed for a high-precision landing, defined as being within 100 meters of the target point.
SLIM made its historic lunar landing Jan. 19, also successfully releasing a pair of small rovers onto the surface just before touchdown. The SLIM landing made Japan the fifth country to land on the moon, but issues with power generation meant the spacecraft’s active time on the surface was cut short. However hope remains that SLIM can be reactivated before the end of the month.
Sakai revealed however that one of the two main thrusters likely failed during the final landing phase. This took place from an altitude of 50 meters to touchdown, resulting in unintended lateral motion above.
“Under these circumstances, the SLIM onboard software autonomously identifies the anomaly, and while controlling the horizontal position as much as possible, SLIM continued the descent with the other engine and moved gradually towards the east.”
The SLIM landing was intended to occur in two steps. First with landing thrusters down, then a smaller thruster firing to tip the spacecraft onto its side. SLIM is then cushioned by five crushable, 3D-printed aluminum lattice landing legs.
An image of SLIM taken by one of the rovers, Transformable Lunar Robot LEV-2, reveals the spacecraft to be on the lunar surface with its thruster pointing upwards. The cause of the apparent engine malfunction is being investigated.
The landing attitude meant SLIM’s solar array is facing westwards, resulting in it initially not receiving sunlight. However JAXA states there is a possibility the solar cells can generate electricity during the lunar evening as illumination improves.
“Although SLIM’s activities on the Moon were originally expected to last only a few days, the necessary preparations for recovery will continue in order to acquire further technical and scientific data,” a statement read.
The situation is reminiscent of the Philae lander as part of Europe’s Rosetta mission. Philae bounced when making its landing attempt on Comet 67P in 2014. It also suffered problems with illumination before briefly reawakening.
JAXA previously stated that SLIM disconnected its battery at 12%, as planned, to prevent over-discharge. SLIM powered down at 12:57 p.m. Eastern (1757 UTC) Jan. 19, just two and a half hours after landing at 10:20 a.m. Eastern (1520 UTC).
The multiband spectroscopic camera (MBC) mounted on SLIM was able to operate on a trial basis and capture images before power was turned off. JAXA published an MBC image created by synthesizing 257 low-resolution monochrome pictures. MBC will be put into action if SLIM can reactivate.
“Preparation is underway to promptly conduct 10-band high-resolution spectroscopic observations once the solar illumination condition improves and SLIM recovers by the power generated by the solar array,” JAXA stated.
The 2.1-kilogram Lunar Excursion Vehicle (LEV-1) small rover successfully conducted activities on the lunar surface, including executed planned leaping movements. LEV-1 achieved direct communication with ground stations, including an inter-robot test radio wave data transmission from LEV-2. Image acquisition by LEV-1 has not been confirmed as of now, according to JAXA.
LEV-1 is in a standby state on the lunar surface. “While the capability to resume activity exists contingent on solar power generation from changes in the direction of the sun, efforts will be maintained to continue receiving signals from LEV-1,” JAXA said.
The baseball-sized, 0.25-kg LEV-2 rover, nicknamed SORA-Q, was driven on the lunar surface and imaged SLIM. “We are currently analyzing other data, including driving logs, and plan to publish the results in the future,” JAXA noted in a statement on the rover.
LEV-2 was jointly developed by JAXA, Tomy, Sony and Doshisha University. It is the smallest and lightest ever lunar rover, according to JAXA.
“The LEV-2 “SORA-Q”, which was developed by combining toy technology, the latest sensor robotics technology, and JAXA’s space technology, and has excellent autonomous operation and motion characteristics,” JAXA Space Exploration Innovation Hub Director Kazuyuki Funaki said.
Sunset over Shioli crater is expected around early UTC Jan. 31. Neither SLIM nor its rovers carry radioisotope heater units. Thus they are not expected to survive the lunar nighttime, when temperatures will drop to around minus 130 Celsius.
- SEO Powered Content & PR Distribution. Get Amplified Today.
- PlatoData.Network Vertical Generative Ai. Empower Yourself. Access Here.
- PlatoAiStream. Web3 Intelligence. Knowledge Amplified. Access Here.
- PlatoESG. Carbon, CleanTech, Energy, Environment, Solar, Waste Management. Access Here.
- PlatoHealth. Biotech and Clinical Trials Intelligence. Access Here.
- Source: https://spacenews.com/japans-slim-achieved-pinpoint-moon-landing-with-just-one-working-engine/
- :has
- :is
- :not
- ][p
- 1
- 10
- 100
- 12
- 13
- 130
- 19
- 20
- 2014
- 25
- 31
- 50
- a
- Able
- above
- According
- accurate
- achieved
- acquire
- acquired
- acquisition
- Action
- active
- activities
- activity
- After
- agency
- aimed
- also
- an
- analyzing
- and
- apparent
- ARE
- around
- Array
- AS
- At
- attempt
- attitude
- autonomous
- autonomously
- basis
- battery
- BE
- been
- before
- being
- briefly
- but
- by
- camera
- CAN
- capability
- capture
- captured
- carry
- Cause
- Cells
- Celsius
- Changes
- characteristics
- circumstances
- combining
- Communication
- condition
- Conduct
- conducted
- Conference
- CONFIRMED
- continue
- continued
- controlling
- country
- created
- Currently
- cushioned
- data
- Days
- defined
- developed
- direct
- direction
- Director
- disconnected
- down
- driven
- driving
- Drop
- during
- Early
- East
- eastern
- efforts
- electricity
- end
- Engine
- Europes
- evening
- EVER
- excellent
- executed
- exists
- expected
- exploration
- facing
- Failed
- few
- fifth
- final
- firing
- First
- five
- For
- from
- fulfilling
- further
- future
- generate
- generated
- generation
- goal
- gradually
- Ground
- Half
- high-resolution
- hope
- Horizontal
- HOURS
- However
- HTML
- HTTPS
- Hub
- identifies
- if
- image
- images
- improves
- in
- Including
- Indian
- initially
- Innovation
- intended
- into
- issues
- IT
- ITS
- Jan
- Japan
- Japan’s
- jpg
- just
- just one
- Key
- Land
- landing
- Last
- latest
- legs
- likely
- Lunar
- made
- Main
- Making
- manager
- max-width
- MBC
- meant
- Mission
- monochrome
- Month
- Moon
- motion
- moved
- movements
- much
- Navigation
- necessary
- Neither
- nor
- noted
- now
- observations
- occur
- of
- off
- on
- Onboard
- once
- ONE
- only
- operate
- operating
- operation
- order
- originally
- Other
- over
- pair
- part
- phase
- Pictures
- Place
- plan
- planned
- plato
- Plato Data Intelligence
- PlatoData
- Point
- position
- possibility
- possible
- power
- powered
- precise
- press
- prevent
- previously
- problems
- project
- publish
- put
- Radio
- receiving
- Recovers
- recovery
- releasing
- remains
- reminiscent
- resulting
- Results
- resume
- Revealed
- Reveals
- robot
- robotics
- rover
- Said
- scientific
- sensor
- side
- signals
- situation
- Slope
- small
- smaller
- Software
- solar
- Solar cells
- Solar Power
- Sony
- South
- Space
- space exploration
- spacecraft
- State
- stated
- States
- Stations
- Steps
- Successfully
- Sun
- sunlight
- Surface
- survive
- taken
- Target
- team
- Technical
- Technology
- test
- that
- The
- The Future
- then
- There.
- These
- they
- this
- thursday
- Thus
- time
- tip
- to
- took
- towards
- toy
- trial
- Turned
- two
- Underway
- units
- university
- upwards
- UTC
- vehicle
- was
- Wave
- were
- when
- which
- while
- will
- with
- within
- working
- zephyrnet