Strona główna > Naciśnij przycisk > Robot gąsienicowy demonstruje nowe podejście do poruszania się w miękkiej robotyce
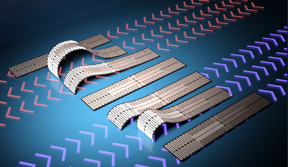 |
| Naukowcy z North Carolina State University zademonstrowali miękkiego robota podobnego do gąsienicy, który może poruszać się do przodu, do tyłu i zanurzać się w wąskich przestrzeniach. Ruch robota-gąsienicy jest napędzany przez nowy wzór srebrnych nanodrutów, które wykorzystują ciepło do kontrolowania sposobu, w jaki robot się wygina, umożliwiając użytkownikom kierowanie robotem w dowolnym kierunku. KREDYT Shuang Wu, Uniwersytet Stanowy Karoliny Północnej |
Abstrakcyjny:
Naukowcy z North Carolina State University zademonstrowali miękkiego robota podobnego do gąsienicy, który może poruszać się do przodu, do tyłu i zanurzać się w wąskich przestrzeniach. Ruch robota-gąsienicy jest napędzany przez nowy wzór srebrnych nanodrutów, które wykorzystują ciepło do kontrolowania sposobu, w jaki robot się wygina, umożliwiając użytkownikom kierowanie robotem w dowolnym kierunku.
Robot gąsienicowy demonstruje nowe podejście do poruszania się w miękkiej robotyce
Durham, Karolina Północna | Opublikowano 24 marca 2023 r
„Ruch gąsienicy jest kontrolowany przez lokalną krzywiznę jej ciała – jej ciało zakrzywia się inaczej, gdy ciągnie się do przodu, niż gdy odpycha się do tyłu” – mówi Yong Zhu, autor korespondent artykułu na temat pracy i Andrew A. Adams Wybitny profesor inżynierii mechanicznej i lotniczej w NC State. „Zaczerpnęliśmy inspirację z biomechaniki gąsienicy, aby naśladować tę lokalną krzywiznę i wykorzystaliśmy grzejniki z nanoprzewodów do kontrolowania podobnej krzywizny i ruchu w robocie-gąsienicy.
„Konstruowanie miękkich robotów, które mogą poruszać się w dwóch różnych kierunkach, jest poważnym wyzwaniem w miękkiej robotyce” — mówi Zhu. „Wbudowane grzejniki z nanoprzewodów pozwalają nam kontrolować ruch robota na dwa sposoby. Możemy kontrolować, które sekcje robota się wyginają, kontrolując schemat ogrzewania w miękkim robocie. I możemy kontrolować stopień, w jakim te sekcje się wyginają, kontrolując ilość dostarczanego ciepła”.
Robot-gąsienica składa się z dwóch warstw polimeru, które inaczej reagują na działanie ciepła. Dolna warstwa kurczy się lub kurczy pod wpływem ciepła. Górna warstwa rozszerza się pod wpływem ciepła. W rozszerzającej się warstwie polimeru osadzony jest wzór srebrnych nanodrutów. Wzór zawiera wiele punktów prowadzących, w których badacze mogą zastosować prąd elektryczny. Naukowcy mogą kontrolować, które sekcje wzoru nanodrutu nagrzewają się, przykładając prąd elektryczny do różnych punktów prowadzących, oraz mogą kontrolować ilość ciepła, przykładając większy lub mniejszy prąd.
„Zademonstrowaliśmy, że robot gąsienicowy jest w stanie ciągnąć się do przodu i odpychać do tyłu” – mówi Shuang Wu, pierwszy autor artykułu i doktor habilitowany w NC State. „Ogólnie rzecz biorąc, im większy prąd zastosowaliśmy, tym szybciej poruszał się w dowolnym kierunku. Odkryliśmy jednak, że istniał optymalny cykl, który dawał polimerowi czas na ostygnięcie – skutecznie pozwalając „mięśniowi” na rozluźnienie się przed ponownym skurczem. Gdybyśmy zbyt szybko próbowali uruchomić robot-gąsienicę, ciało nie miało czasu na „relaks” przed ponownym skurczem, co zaburzyło jego ruch”.
Naukowcy wykazali również, że ruch robota gąsienicowego można kontrolować do punktu, w którym użytkownicy mogą kierować nim pod bardzo niską szczeliną – podobnie jak w przypadku kierowania robotem, aby wślizgnął się pod drzwi. Zasadniczo naukowcy mogli kontrolować zarówno ruch do przodu, jak i do tyłu, a także to, jak wysoko robot wygiął się w górę w dowolnym momencie tego procesu.
„To podejście do sterowania ruchem w miękkim robocie jest wysoce energooszczędne i jesteśmy zainteresowani zbadaniem sposobów, dzięki którym moglibyśmy uczynić ten proces jeszcze bardziej wydajnym” — mówi Zhu. „Dodatkowe kolejne kroki obejmują integrację tego podejścia do poruszania się robotów miękkich z czujnikami lub innymi technologiami do wykorzystania w różnych zastosowaniach – takich jak urządzenia poszukiwawczo-ratownicze”.
Artykuł „Inspirowany przez firmę Caterpillar miękki pełzający robot z rozproszoną programowalną aktywacją termiczną” zostanie opublikowany 22 marca w czasopiśmie Science Advances. Współautorem artykułu jest Jie Yin, profesor nadzwyczajny inżynierii mechanicznej i lotniczej w NC State; Yaoye Hong, doktorant student w NC State; oraz przez Yao Zhao, badacza ze stopniem doktora w NC State.
Praca została wykonana przy wsparciu Narodowej Fundacji Nauki w ramach grantów 2122841, 2005374 i 2126072; oraz z National Institutes of Health, pod numerem grantu 1R01HD108473.
####
Aby uzyskać więcej informacji, kliknij tutaj
Łączność:
Kontakt dla mediów
Matta Shipmana
North Carolina State University
Kontakt z ekspertem
Yong Zhu
NC State University
Prawa autorskie © North Carolina State University
Jeśli masz komentarz, proszę Kontakt my.
Wydawcy komunikatów prasowych, a nie 7th Wave, Inc. lub Nanotechnology Now, ponoszą wyłączną odpowiedzialność za dokładność treści.
Zakładka:








| Linki pokrewne |
| Powiązane wiadomości Prasa |
Wiadomości i informacje
![]() Przełączanie optyczne z rekordową szybkością otwiera drzwi dla ultraszybkiej, opartej na świetle elektroniki i komputerów: Marzec 24th, 2023
Przełączanie optyczne z rekordową szybkością otwiera drzwi dla ultraszybkiej, opartej na świetle elektroniki i komputerów: Marzec 24th, 2023
![]() Sieć półprzewodnikowa łączy elektrony i momenty magnetyczne Marzec 24th, 2023
Sieć półprzewodnikowa łączy elektrony i momenty magnetyczne Marzec 24th, 2023
![]() Światło spotyka się z głębokim uczeniem: obliczenia wystarczająco szybkie dla sztucznej inteligencji nowej generacji Marzec 24th, 2023
Światło spotyka się z głębokim uczeniem: obliczenia wystarczająco szybkie dla sztucznej inteligencji nowej generacji Marzec 24th, 2023
![]() Dwuwarstwowy stały elektrolit polimerowy wzmocniony podłożem PET/PVDF poprawia wydajność litowo-metalowego akumulatora w stanie stałym Marzec 24th, 2023
Dwuwarstwowy stały elektrolit polimerowy wzmocniony podłożem PET/PVDF poprawia wydajność litowo-metalowego akumulatora w stanie stałym Marzec 24th, 2023
Robotyka
![]() Włókna nanostrukturalne mogą podszywać się pod ludzkie mięśnie Czerwiec 3rd, 2022
Włókna nanostrukturalne mogą podszywać się pod ludzkie mięśnie Czerwiec 3rd, 2022
Rządowe ustawodawstwo / rozporządzenie / finansowanie / polityka
![]() Nowy eksperyment tłumaczy informacje kwantowe między technologiami w ważnym kroku dla kwantowego Internetu Marzec 24th, 2023
Nowy eksperyment tłumaczy informacje kwantowe między technologiami w ważnym kroku dla kwantowego Internetu Marzec 24th, 2023
![]() Przełączanie optyczne z rekordową szybkością otwiera drzwi dla ultraszybkiej, opartej na świetle elektroniki i komputerów: Marzec 24th, 2023
Przełączanie optyczne z rekordową szybkością otwiera drzwi dla ultraszybkiej, opartej na świetle elektroniki i komputerów: Marzec 24th, 2023
![]() Sieć półprzewodnikowa łączy elektrony i momenty magnetyczne Marzec 24th, 2023
Sieć półprzewodnikowa łączy elektrony i momenty magnetyczne Marzec 24th, 2023
Możliwe futures
![]() Nowy eksperyment tłumaczy informacje kwantowe między technologiami w ważnym kroku dla kwantowego Internetu Marzec 24th, 2023
Nowy eksperyment tłumaczy informacje kwantowe między technologiami w ważnym kroku dla kwantowego Internetu Marzec 24th, 2023
![]() Grafen rośnie – i my to widzimy Marzec 24th, 2023
Grafen rośnie – i my to widzimy Marzec 24th, 2023
![]() HKUMed wynajduje nowatorskie, reagujące na ultradźwięki, antybakteryjne nano-arkusze, które skutecznie zwalczają infekcje tkanki kostnej Marzec 24th, 2023
HKUMed wynajduje nowatorskie, reagujące na ultradźwięki, antybakteryjne nano-arkusze, które skutecznie zwalczają infekcje tkanki kostnej Marzec 24th, 2023
![]() Uniwersalna strategia proszku na proszek z HCl do przygotowania bezołowiowych perowskitów Marzec 24th, 2023
Uniwersalna strategia proszku na proszek z HCl do przygotowania bezołowiowych perowskitów Marzec 24th, 2023
Odkrycia
![]() Nowy eksperyment tłumaczy informacje kwantowe między technologiami w ważnym kroku dla kwantowego Internetu Marzec 24th, 2023
Nowy eksperyment tłumaczy informacje kwantowe między technologiami w ważnym kroku dla kwantowego Internetu Marzec 24th, 2023
![]() Grafen rośnie – i my to widzimy Marzec 24th, 2023
Grafen rośnie – i my to widzimy Marzec 24th, 2023
![]() HKUMed wynajduje nowatorskie, reagujące na ultradźwięki, antybakteryjne nano-arkusze, które skutecznie zwalczają infekcje tkanki kostnej Marzec 24th, 2023
HKUMed wynajduje nowatorskie, reagujące na ultradźwięki, antybakteryjne nano-arkusze, które skutecznie zwalczają infekcje tkanki kostnej Marzec 24th, 2023
![]() Uniwersalna strategia proszku na proszek z HCl do przygotowania bezołowiowych perowskitów Marzec 24th, 2023
Uniwersalna strategia proszku na proszek z HCl do przygotowania bezołowiowych perowskitów Marzec 24th, 2023
Ogłoszenia
![]() Sieć półprzewodnikowa łączy elektrony i momenty magnetyczne Marzec 24th, 2023
Sieć półprzewodnikowa łączy elektrony i momenty magnetyczne Marzec 24th, 2023
![]() Światło spotyka się z głębokim uczeniem: obliczenia wystarczająco szybkie dla sztucznej inteligencji nowej generacji Marzec 24th, 2023
Światło spotyka się z głębokim uczeniem: obliczenia wystarczająco szybkie dla sztucznej inteligencji nowej generacji Marzec 24th, 2023
![]() Dwuwarstwowy stały elektrolit polimerowy wzmocniony podłożem PET/PVDF poprawia wydajność litowo-metalowego akumulatora w stanie stałym Marzec 24th, 2023
Dwuwarstwowy stały elektrolit polimerowy wzmocniony podłożem PET/PVDF poprawia wydajność litowo-metalowego akumulatora w stanie stałym Marzec 24th, 2023
![]() Zrozumienie mechanizmu nierównomiernego tworzenia się warstwy diamentowej na narzędziach: Torowanie drogi do procesu suchego o mniejszym wpływie na środowisko Marzec 24th, 2023
Zrozumienie mechanizmu nierównomiernego tworzenia się warstwy diamentowej na narzędziach: Torowanie drogi do procesu suchego o mniejszym wpływie na środowisko Marzec 24th, 2023
Wywiady / recenzje książek / eseje / raporty / podcasty / czasopisma / białe księgi / plakaty
![]() HKUMed wynajduje nowatorskie, reagujące na ultradźwięki, antybakteryjne nano-arkusze, które skutecznie zwalczają infekcje tkanki kostnej Marzec 24th, 2023
HKUMed wynajduje nowatorskie, reagujące na ultradźwięki, antybakteryjne nano-arkusze, które skutecznie zwalczają infekcje tkanki kostnej Marzec 24th, 2023
![]() Uniwersalna strategia proszku na proszek z HCl do przygotowania bezołowiowych perowskitów Marzec 24th, 2023
Uniwersalna strategia proszku na proszek z HCl do przygotowania bezołowiowych perowskitów Marzec 24th, 2023
![]() Przełączanie optyczne z rekordową szybkością otwiera drzwi dla ultraszybkiej, opartej na świetle elektroniki i komputerów: Marzec 24th, 2023
Przełączanie optyczne z rekordową szybkością otwiera drzwi dla ultraszybkiej, opartej na świetle elektroniki i komputerów: Marzec 24th, 2023
![]() Sieć półprzewodnikowa łączy elektrony i momenty magnetyczne Marzec 24th, 2023
Sieć półprzewodnikowa łączy elektrony i momenty magnetyczne Marzec 24th, 2023
- Dystrybucja treści i PR oparta na SEO. Uzyskaj wzmocnienie już dziś.
- Platoblockchain. Web3 Inteligencja Metaverse. Wzmocniona wiedza. Dostęp tutaj.
- Źródło: http://www.nanotech-now.com/news.cgi?story_id=57319
- :Jest
- $W GÓRĘ
- 10
- 2D
- 8
- a
- Zdolny
- precyzja
- adaptacja
- adres
- zaliczki
- Lotnictwo
- inżynieria lotnicza
- Pozwalać
- pozwala
- ilość
- i
- Andrew
- aplikacje
- stosowany
- Aplikuj
- Stosowanie
- podejście
- SĄ
- sztuczny
- AS
- Współpracownik
- At
- autor
- Bakteria
- bateria
- BE
- zanim
- jest
- pomiędzy
- krew
- ciało
- KOŚĆ
- Dolny
- by
- CAN
- zdolny
- Centrum
- CGI
- wyzwanie
- tańsze
- kliknij
- COM
- komentarz
- Komunikacja
- komputery
- computing
- zawartość
- kontraktowanie
- umowy
- kontrola
- kontrolowanych
- kontrolowania
- Chłodny
- Odpowiedni
- mógłby
- kredyt
- Aktualny
- cykl
- głęboko
- głęboka nauka
- wykazać
- demonstruje
- rozwijać
- urządzenie
- urządzenia
- Diament
- ZROBIŁ
- różne
- Zanurz
- kierunek
- kierunki
- Wybitny
- dystrybuowane
- Drzwi
- sporządzony
- napędzany
- jazdy
- suchy
- faktycznie
- wydajny
- bądź
- elektryczny
- Elektronika
- elektrony
- osadzone
- nieskończoność
- energia
- Inżynieria
- dość
- środowiskowy
- istota
- Eter (ETH)
- Parzyste
- Przede wszystkim system został opracowany
- rozszerzenie
- rozszerza się
- eksperyment
- Exploring
- narażony
- FAST
- szybciej
- luty
- włókna
- Film
- i terminów, a
- W razie zamówieenia projektu
- formacja
- Naprzód
- znaleziono
- Fundacja
- od
- szczelina
- Ogólne
- gif
- przyznać
- Dotacje
- Rośnie
- Have
- Zdrowie
- Wysoki
- wysoko
- Hong
- W jaki sposób
- Jak wysoka
- Jednak
- http
- HTTPS
- człowiek
- zidentyfikować
- Idle
- Obrazowanie
- ważny
- poprawia
- in
- Inc
- zawierać
- obejmuje
- Informacja
- Innowacyjny
- Inspiracja
- inspirowane
- Integracja
- zainteresowany
- IT
- JEGO
- samo
- dziennik
- lipiec
- warstwa
- nioski
- prowadzić
- Wyprowadzenia
- nauka
- linki
- lit
- miejscowy
- niski
- robić
- Manipulacja
- March
- materiały
- mechaniczny
- mechanizm
- medyczny
- urządzenia medyczne
- Spełnia
- Pamięć
- metal
- jeszcze
- bardziej wydajny
- ruch
- projekty
- ruch
- pójść naprzód
- ruch
- wielokrotność
- nanotechnologia
- narodowy
- Narodowy Instytut Zdrowia
- Nauka narodowa
- Natura
- Państwo NC
- NCSU
- netto
- sieci
- Nowości
- aktualności
- Następny
- Północ
- Karolina Północna
- powieść
- numer
- of
- Stary
- on
- otwiera
- Optymalny
- Zlecenia
- Inne
- Papier
- Wzór
- Chodnik
- wykonać
- PHP
- plato
- Analiza danych Platona
- PlatoDane
- Proszę
- plus
- punkt
- zwrotnica
- polimer
- Post
- napisali
- power
- przygotowanie
- wygląda tak
- Profesor
- własność
- opublikowany
- ciągnięcie
- Ściąga
- Popychanie
- Kwant
- informacja kwantowa
- szybko
- rekord
- Relax
- prasowe
- badacz
- Badacze
- Odpowiadać
- odpowiedzialny
- powrót
- robot
- robotyka
- roboty
- Zapisz
- mówią
- Skala
- nauka
- Szukaj
- działy
- czujniki
- Share
- znaczący
- Srebro
- podobny
- Prosty
- Miękki
- solidny
- obowiązuje
- prędkości
- Spot
- początek
- Stan
- Ewolucja krok po kroku
- Cel
- Strategia
- student
- Zatwierdź
- taki
- wsparcie
- system
- Technologies
- Technologia
- że
- Połączenia
- termiczny
- czas
- do
- także
- narzędzia
- Top
- twist
- dla
- uniwersalny
- uniwersytet
- w górę
- us
- posługiwać się
- Użytkownicy
- różnorodny
- fala
- Droga..
- sposoby
- DOBRZE
- który
- będzie
- w
- Praca
- by
- wu
- Yahoo
- zefirnet
- Zhao