29. mai 2023 (Nanowerk Nyheter) Forskere fra Institutt for mekanisk vitenskap og bioingeniørvitenskap ved Osaka University har oppfunnet en ny type gårobot som utnytter dynamisk ustabilitet for å navigere. Ved å endre fleksibiliteten til koblingene kan roboten fås til å snu uten behov for komplekse beregningskontrollsystemer. Dette arbeidet kan hjelpe til med å lage redningsroboter som er i stand til å krysse ujevnt terreng.
De fleste dyr på jorden har utviklet et robust bevegelsessystem ved hjelp av ben som gir dem en høy grad av mobilitet over et bredt spekter av miljøer. Noe skuffende har ingeniører som har forsøkt å gjenskape denne tilnærmingen ofte funnet ut at roboter med ben er overraskende skjøre. Nedbrytningen av til og med ett ben på grunn av gjentatte belastninger kan sterkt begrense funksjonsevnen til disse robotene.
I tillegg krever det mye datakraft å kontrollere et stort antall ledd slik at roboten kan krysse komplekse miljøer. Forbedringer i denne utformingen vil være ekstremt nyttig for å bygge autonome eller semi-autonome roboter som kan fungere som lete- eller redningskjøretøy og gå inn i farlige områder.
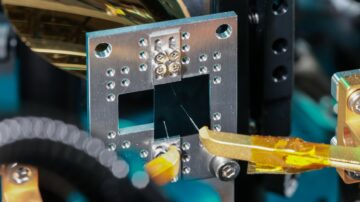
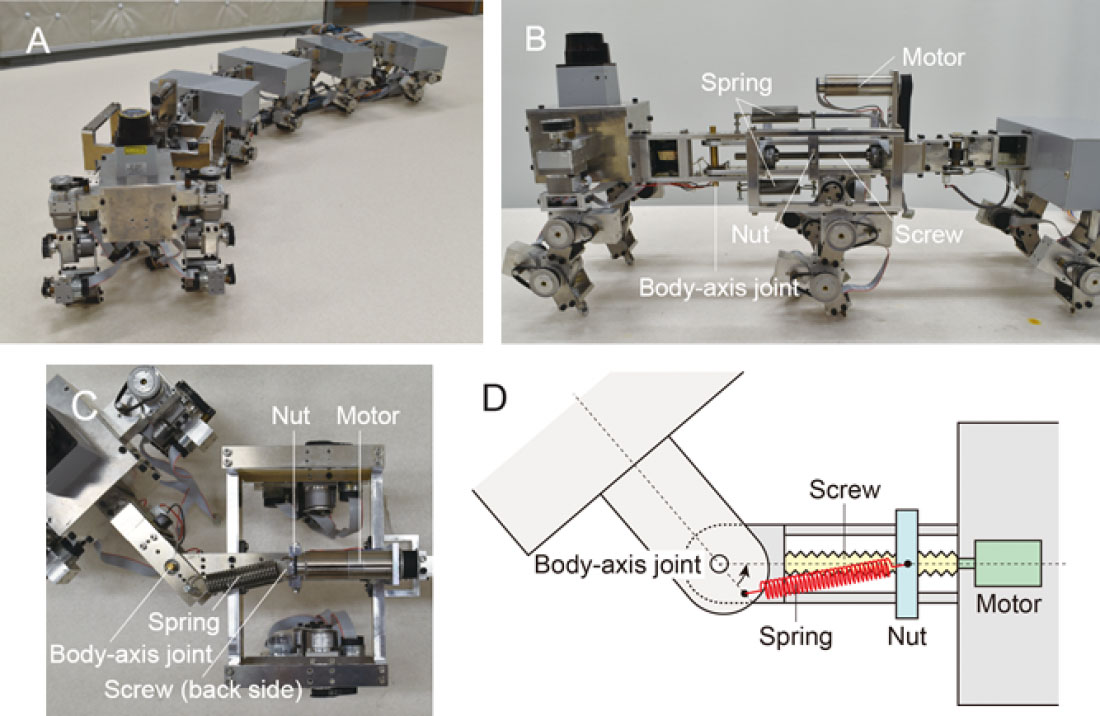 Myriapod-robot (A) og Variabel kroppsakse-fleksibilitetsmekanisme (B. Forfra, C. Toppvisning, D. Skjema av ovenfra). (Bilde: CC BY-NC, 2023, Aoi et al., Soft Robotics)
Nå har etterforskere fra Osaka University utviklet en biomimetisk "myriapod"-robot som utnytter en naturlig ustabilitet som kan konvertere rett gange til buet bevegelse. I en studie publisert nylig i Myk robotikk (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), beskriver forskere fra Osaka University roboten deres, som består av seks segmenter (med to ben koblet til hvert segment) og fleksible ledd. Ved hjelp av en justerbar skrue kan fleksibiliteten til koblingene modifiseres med motorer under gangbevegelsen.
Forskerne viste at økt fleksibilitet i leddene førte til en situasjon kalt en "høygaffelbifurkasjon", der rett gange blir ustabil. I stedet går roboten over til å gå i et buet mønster, enten til høyre eller venstre. Normalt ville ingeniører prøve å unngå å skape ustabilitet. Kontrollert bruk av dem kan imidlertid muliggjøre effektiv manøvrerbarhet.
"Vi ble inspirert av evnen til visse ekstremt smidige insekter som lar dem kontrollere den dynamiske ustabiliteten i egen bevegelse for å indusere raske bevegelsesendringer," sier Shinya Aoi, forfatter av studien. Fordi denne tilnærmingen ikke direkte styrer bevegelsen til kroppsaksen, men heller kontrollerer fleksibiliteten, kan den redusere både beregningskompleksiteten og energikravene i stor grad.
Myriapod-robot (A) og Variabel kroppsakse-fleksibilitetsmekanisme (B. Forfra, C. Toppvisning, D. Skjema av ovenfra). (Bilde: CC BY-NC, 2023, Aoi et al., Soft Robotics)
Nå har etterforskere fra Osaka University utviklet en biomimetisk "myriapod"-robot som utnytter en naturlig ustabilitet som kan konvertere rett gange til buet bevegelse. I en studie publisert nylig i Myk robotikk (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), beskriver forskere fra Osaka University roboten deres, som består av seks segmenter (med to ben koblet til hvert segment) og fleksible ledd. Ved hjelp av en justerbar skrue kan fleksibiliteten til koblingene modifiseres med motorer under gangbevegelsen.
Forskerne viste at økt fleksibilitet i leddene førte til en situasjon kalt en "høygaffelbifurkasjon", der rett gange blir ustabil. I stedet går roboten over til å gå i et buet mønster, enten til høyre eller venstre. Normalt ville ingeniører prøve å unngå å skape ustabilitet. Kontrollert bruk av dem kan imidlertid muliggjøre effektiv manøvrerbarhet.
"Vi ble inspirert av evnen til visse ekstremt smidige insekter som lar dem kontrollere den dynamiske ustabiliteten i egen bevegelse for å indusere raske bevegelsesendringer," sier Shinya Aoi, forfatter av studien. Fordi denne tilnærmingen ikke direkte styrer bevegelsen til kroppsaksen, men heller kontrollerer fleksibiliteten, kan den redusere både beregningskompleksiteten og energikravene i stor grad.
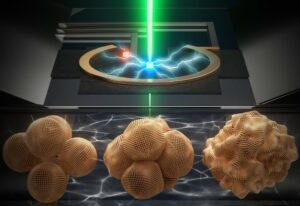
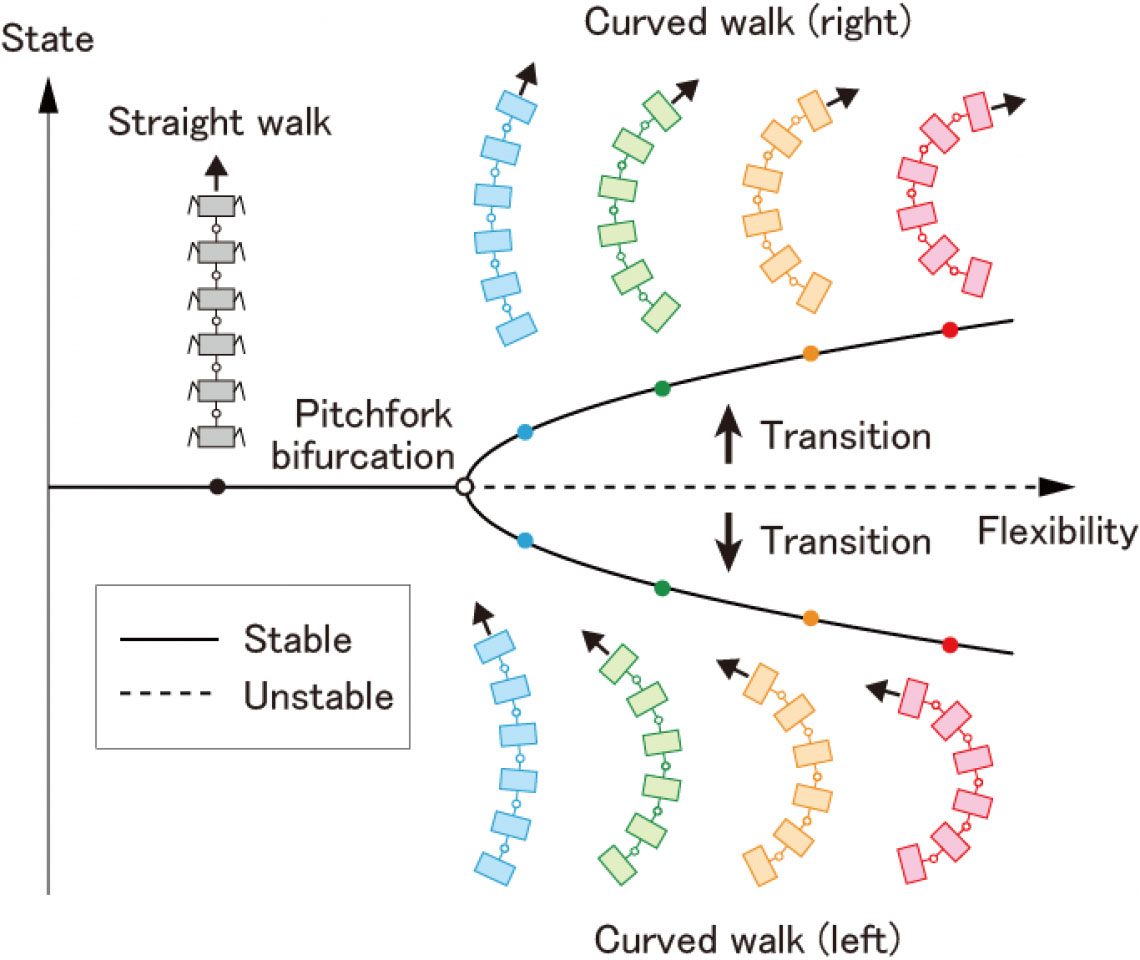 Stabile og ustabile gangmønstre avhengig av kroppsaksens fleksibilitet. (Bilde: CC BY-NC, 2023, Aoi et al., Soft Robotics)
Teamet testet robotens evne til å nå bestemte steder og fant ut at den kunne navigere ved å ta buede stier mot mål. "Vi kan forutse bruksområder i en lang rekke scenarier, for eksempel søk og redning, arbeid i farlige miljøer eller utforskning på andre planeter," sier Mau Adachi, en annen studieforfatter. Fremtidige versjoner kan inkludere flere segmenter og kontrollmekanismer.
Stabile og ustabile gangmønstre avhengig av kroppsaksens fleksibilitet. (Bilde: CC BY-NC, 2023, Aoi et al., Soft Robotics)
Teamet testet robotens evne til å nå bestemte steder og fant ut at den kunne navigere ved å ta buede stier mot mål. "Vi kan forutse bruksområder i en lang rekke scenarier, for eksempel søk og redning, arbeid i farlige miljøer eller utforskning på andre planeter," sier Mau Adachi, en annen studieforfatter. Fremtidige versjoner kan inkludere flere segmenter og kontrollmekanismer.
Myriapod-robot (A) og Variabel kroppsakse-fleksibilitetsmekanisme (B. Forfra, C. Toppvisning, D. Skjema av ovenfra). (Bilde: CC BY-NC, 2023, Aoi et al., Soft Robotics)
Nå har etterforskere fra Osaka University utviklet en biomimetisk "myriapod"-robot som utnytter en naturlig ustabilitet som kan konvertere rett gange til buet bevegelse. I en studie publisert nylig i Myk robotikk (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), beskriver forskere fra Osaka University roboten deres, som består av seks segmenter (med to ben koblet til hvert segment) og fleksible ledd. Ved hjelp av en justerbar skrue kan fleksibiliteten til koblingene modifiseres med motorer under gangbevegelsen.
Forskerne viste at økt fleksibilitet i leddene førte til en situasjon kalt en "høygaffelbifurkasjon", der rett gange blir ustabil. I stedet går roboten over til å gå i et buet mønster, enten til høyre eller venstre. Normalt ville ingeniører prøve å unngå å skape ustabilitet. Kontrollert bruk av dem kan imidlertid muliggjøre effektiv manøvrerbarhet.
"Vi ble inspirert av evnen til visse ekstremt smidige insekter som lar dem kontrollere den dynamiske ustabiliteten i egen bevegelse for å indusere raske bevegelsesendringer," sier Shinya Aoi, forfatter av studien. Fordi denne tilnærmingen ikke direkte styrer bevegelsen til kroppsaksen, men heller kontrollerer fleksibiliteten, kan den redusere både beregningskompleksiteten og energikravene i stor grad.
Stabile og ustabile gangmønstre avhengig av kroppsaksens fleksibilitet. (Bilde: CC BY-NC, 2023, Aoi et al., Soft Robotics)
Teamet testet robotens evne til å nå bestemte steder og fant ut at den kunne navigere ved å ta buede stier mot mål. "Vi kan forutse bruksområder i en lang rekke scenarier, for eksempel søk og redning, arbeid i farlige miljøer eller utforskning på andre planeter," sier Mau Adachi, en annen studieforfatter. Fremtidige versjoner kan inkludere flere segmenter og kontrollmekanismer.
- SEO-drevet innhold og PR-distribusjon. Bli forsterket i dag.
- PlatoAiStream. Web3 Data Intelligence. Kunnskap forsterket. Tilgang her.
- Minting the Future med Adryenn Ashley. Tilgang her.
- Kjøp og selg aksjer i PRE-IPO-selskaper med PREIPO®. Tilgang her.
- kilde: https://www.nanowerk.com/news2/robotics/newsid=63068.php
- :ikke
- 10
- 2022
- 2023
- 7
- 8
- 9
- a
- evne
- I stand
- Handling
- tillegg
- Ytterligere
- justerbar
- Fordel
- smidig
- AL
- tillater
- an
- og
- dyr
- En annen
- søknader
- tilnærming
- ER
- områder
- AS
- bistå
- At
- forsøkt
- forfatter
- autonom
- unngå
- Axis
- BE
- fordi
- blir
- kroppen
- både
- Breakdown
- Bygning
- men
- by
- som heter
- CAN
- sentrum
- viss
- Endringer
- endring
- komplekse
- kompleksitet
- datamaskin
- datamaskinens strøm
- tilkoblet
- kontroll
- kontrolleres
- kontrollerende
- kontroller
- konvertere
- kunne
- Opprette
- skaperverket
- Dangerous
- Dato
- Grad
- Avdeling
- avhengig
- beskrive
- utforming
- utviklet
- direkte
- gjør
- to
- under
- dynamisk
- E&T
- hver enkelt
- jord
- effektiv
- enten
- muliggjøre
- energi
- Ingeniører
- Enter
- miljøer
- Selv
- utviklet seg
- leting
- ekstremt
- fleksibilitet
- fleksibel
- Til
- funnet
- fra
- foran
- funksjon
- framtid
- Go
- sterkt
- Ha
- Høy
- Men
- HTTPS
- bilde
- forbedringer
- in
- inkludere
- økende
- inspirert
- ustabilitet
- i stedet
- inn
- Oppfunnet
- etterforskerne
- IT
- jpg
- Type
- stor
- Led
- venstre
- ben
- BEGRENSE
- steder
- Lot
- laget
- Making
- Kan..
- mekanisk
- mekanisme
- mekanismer
- Middle
- mobilitet
- modifisert
- mest
- bevegelse
- Motorer
- bevegelse
- Naturlig
- Naviger
- Trenger
- Ny
- normalt
- nå
- Antall
- of
- ofte
- on
- ONE
- or
- Annen
- enn
- egen
- Mønster
- mønstre
- Planetene
- plato
- Platon Data Intelligence
- PlatonData
- makt
- gir
- publisert
- Rask
- område
- heller
- å nå
- nylig
- redusere
- gjentatt
- Krav
- Krever
- redde
- forskere
- ikke sant
- robot
- robotikk
- roboter
- robust
- sier
- scenarier
- Vitenskap
- Søk
- segmentet
- segmenter
- alvorlig
- viste
- situasjon
- SIX
- So
- Soft
- noe
- spesifikk
- stabil
- rett
- stresset
- Studer
- slik
- system
- Systemer
- tar
- ta
- mål
- lag
- Det
- De
- deres
- Dem
- Disse
- denne
- til
- topp
- mot
- overganger
- prøve
- SVING
- to
- universitet
- bruke
- ved hjelp av
- variasjon
- Kjøretøy
- av
- Se
- walking
- VI VIL
- var
- hvilken
- HVEM
- bred
- Bred rekkevidde
- med
- uten
- Arbeid
- arbeid
- ville
- zephyrnet
Mer fra Nanowerk


Origami-basert integrasjon av roboter som føler, bestemmer og reagerer
Kilde node: 2565107
Tidstempel: April 4, 2023
To/kvasi-to-dimensjonale perovskittbaserte heterostrukturer: Konstruksjon, egenskaper og bruksområder
Kilde node: 1938788
Tidstempel: Februar 3, 2023

Forskere beskriver aldri tidligere sett egenskaper i en familie av superledende Kagome-metaller
Kilde node: 1952937
Tidstempel: Februar 11, 2023
Integrerte fotoniske kretser kan bidra til å lukke 'terahertz gap'
Kilde node: 1899339
Tidstempel: Jan 14, 2023

Karbonutslipp fra gjødsel kan reduseres med så mye som 80 % innen 2050
Kilde node: 1951214
Tidstempel: Februar 11, 2023
Hvordan en rekordstor kobbernanokatalysator omdanner CO2 til flytende drivstoff
Kilde node: 1961058
Tidstempel: Februar 16, 2023
Forskere 3D-printer funksjonelt menneskelig hjernevev
Kilde node: 3093799
Tidstempel: Februar 2, 2024
Utvikle teknologier for å redusere kostnadene ved grønn hydrogenproduksjon
Kilde node: 2700260
Tidstempel: Juni 2, 2023
Lås opp hemmelighetene til spinn med høyharmoniske prober
Kilde node: 2969974
Tidstempel: November 10, 2023