En teknisk artikkel med tittelen "Simultaneous Localization and Mapping (SLAM) for Synthetic Aperture Radar (SAR) Processing in the Field of Autonomous Driving" ble publisert av forskere ved Ulm University.
Abstrakt:
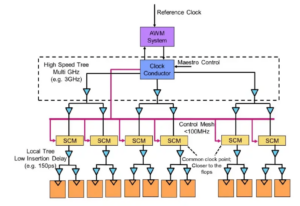
"Autonom kjøreteknologi har gjort bemerkelsesverdige fremskritt de siste årene, revolusjonert transportsystemer og banet vei for sikrere og mer effektive reiser. En av de kritiske utfordringene ved å utvikle helt autonome kjøretøy er nøyaktig oppfatning av omgivelsene. Radarsensornettverk gir mulighet for robust miljødeteksjon. Det blir tydelig at prinsippet om en syntetisk aperturradar (SAR) kan brukes ikke bare innen jordobservasjon, men også i økende grad innen autonom kjøring. Ved hjelp av radarsensorer montert på kjøretøy kan det lages enorme syntetiske blenderåpninger og dermed oppnås en høy vinkeloppløsning, som til slutt gjør det mulig å få detaljerte bilder. Økt bildekvalitet øker imidlertid også kravene til posisjonsnøyaktighet og dermed lokaliseringen av kjøretøyet i kartet. Siden relative lokaliseringsnøyaktigheter i millimeterområdet over lange baner ikke kan oppnås med konvensjonelle Global Navigation Satellite Systems (GNSS), brukes ofte såkalte simultane lokaliserings- og kartleggingsalgoritmer (SLAM). Denne artikkelen presenterer en rent radarbasert SLAM-algoritme, som tillater høyoppløselig SAR-behandling i bilfrekvensdomenet på 77 GHz. Den presenterte algoritmen blir evaluert ved målinger for baner med en lengde på opptil 500 m og en målingsvarighet på mer enn to minutter."
Finn det teknisk papir her. Publisert desember 2023.
T. Grebner, R. Riekenbrauck og C. Waldschmidt, "Simultaneous Localization and Mapping (SLAM) for Synthetic Aperture Radar (SAR) Processing in the Field of Autonomous Driving," i IEEE Transactions on Radar Systems, vol. 2, s. 47-66, 2024, doi: 10.1109/TRS.2023.3347734.
Relatert Reading
Hvor mange sensorer for autonom kjøring?
Sensorteknologier utvikler seg fortsatt, og kapasiteter diskuteres.
Klargjøring for kjøretøy på nivå 4
Autonomi vil sannsynligvis komme i forskjellige stadier av L3+. Hva mangler, og hvilke teknologi- og forretningsutfordringer som må løses.
- SEO-drevet innhold og PR-distribusjon. Bli forsterket i dag.
- PlatoData.Network Vertical Generative Ai. Styrk deg selv. Tilgang her.
- PlatoAiStream. Web3 Intelligence. Kunnskap forsterket. Tilgang her.
- PlatoESG. Karbon, CleanTech, Energi, Miljø, Solenergi, Avfallshåndtering. Tilgang her.
- PlatoHelse. Bioteknologisk og klinisk etterretning. Tilgang her.
- kilde: https://semiengineering.com/radar-based-slam-algorithm-ulm-university/
- : har
- :er
- :ikke
- $OPP
- 10
- 2023
- 2024
- 500
- 77
- a
- nøyaktighet
- nøyaktig
- oppnådd
- algoritme
- algoritmer
- tillater
- også
- og
- Vinkel
- tilsynelatende
- ER
- At
- automotive
- autonom
- autonome kjøretøyer
- BE
- bli
- være
- virksomhet
- men
- by
- CAN
- kan ikke
- evner
- evne
- utfordringer
- Kom
- konvensjonell
- opprettet
- kritisk
- Desember
- krav
- detaljert
- Gjenkjenning
- utvikle
- forskjellig
- domene
- kjøring
- varighet
- jord
- effektiv
- ansatt
- Miljø
- miljømessige
- evaluert
- utvikling
- felt
- Til
- Frekvens
- fullt
- Global
- hjelpe
- her.
- Høy
- høy oppløsning
- Men
- HTTPS
- stort
- IEEE
- bilde
- bilder
- in
- øker
- økende
- stadig
- IT
- Journeys
- Lengde
- Nivå
- nivå 4
- Sannsynlig
- Lokalisering
- Lang
- laget
- mange
- kart
- kartlegging
- måling
- målinger
- minutter
- mangler
- mer
- mer effektivt
- Navigasjon
- Trenger
- nettverk
- Ny
- observasjon
- innhentet
- of
- ofte
- on
- ONE
- bare
- åpen
- enn
- Papir
- asfaltering
- persepsjon
- plato
- Platon Data Intelligence
- PlatonData
- posisjon
- presentert
- gaver
- prinsipp
- prosessering
- Progress
- gi
- publisert
- rent
- kvalitet
- R
- radar
- område
- nylig
- slektning
- bemerkelsesverdig
- forskere
- oppløsning
- revolusjonerer
- robust
- sikrere
- satellitt
- sensor
- sensorer
- samtidig
- siden
- løst
- stadier
- Still
- rundt
- syntetisk
- Systemer
- Teknisk
- Technologies
- Teknologi
- enn
- Det
- De
- denne
- Dermed
- tittelen
- til
- Transaksjoner
- transport
- to
- Til syvende og sist
- universitet
- kjøretøy
- Kjøretøy
- var
- Vei..
- hvilken
- vil
- med
- år
- zephyrnet