03. mai 2023 (Nanowerk Nyheter) Siden begrepet "myk robotikk" ble tatt i bruk i 2008, har ingeniører i feltet bygget forskjellige representasjoner av fleksible maskiner som er nyttige i utforskning, bevegelse, rehabilitering og til og med plass. En kilde til inspirasjon: måten dyr beveger seg i naturen. Et team av MIT-forskere har tatt dette et skritt videre og utviklet SoftZoo, en bio-inspirert plattform som gjør det mulig for ingeniører å studere myk robot-co-design. Rammeverket optimerer algoritmer som består av design, som bestemmer hvordan roboten skal se ut; og kontroll, eller systemet som muliggjør robotbevegelse, som forbedrer hvordan brukere automatisk genererer konturer for potensielle maskiner.
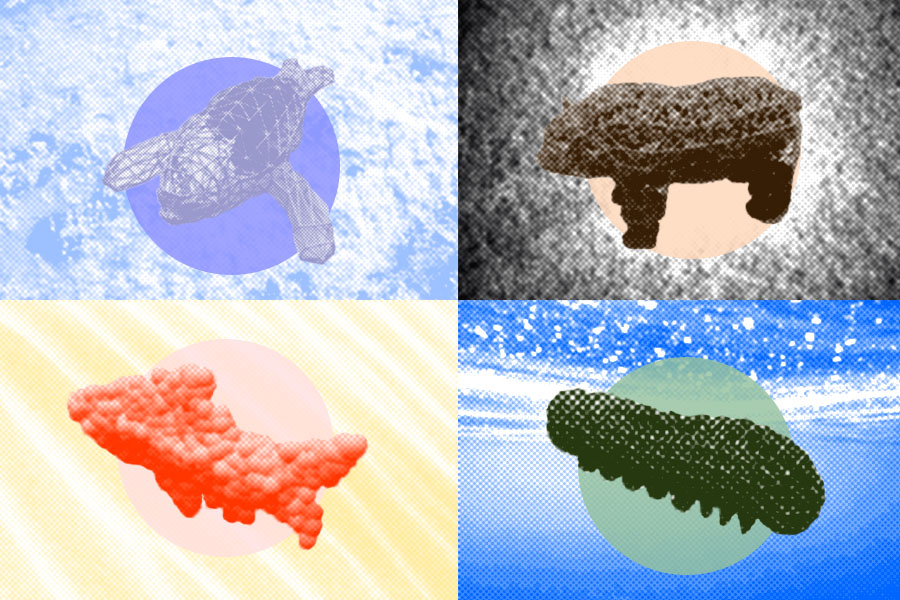 Forskere utviklet et system for myk robot-co-design, som betyr i fellesskap å søke og optimalisere for robotdesign — formen på roboten, hvor man skal legge muskler i robotkroppen, hvor myk roboten er i ulike kroppsregioner; og basert på robotdesignet, måten å kontrollere den for å oppnå en måloppgave. (Bilde: Alex Shipps/MIT CSAIL og forskerne) Plattformen tar en tur på villsiden og har 3D-modeller av dyr som pandabjørner, fisker, haier og larver som design som kan simulere myke robotikkoppgaver som bevegelse , smidig svinging og stifølging i forskjellige miljøer. Enten ved snø, ørken, leire eller vann, demonstrerer plattformen ytelsesavveiningene til forskjellige design i forskjellige terreng.
"Rammeverket vårt kan hjelpe brukere med å finne den beste konfigurasjonen for en robots form, slik at de kan designe myke robotikkalgoritmer som kan gjøre mange forskjellige ting," sier MIT PhD-student Tsun-Hsuan Wang, en tilknyttet Computer Science and Artificial Intelligence Laboratory ( CSAIL) som er ledende forsker på prosjektet. "I hovedsak hjelper det oss å forstå de beste strategiene for roboter til å samhandle med miljøene deres." SoftZoo er mer omfattende enn lignende plattformer, som allerede simulerer design og kontroll, fordi den modellerer bevegelser som reagerer på de fysiske egenskapene til ulike biomer. Rammeverkets allsidighet kommer fra en differensierbar multifysikkmotor, som muliggjør simulering av flere aspekter av et fysisk system på samme tid, for eksempel en babysel som snur seg på is eller en larve som beveger seg over et våtmarksmiljø. Motorens differensierbarhet optimerer co-design ved å redusere antall ofte kostbare simuleringer som kreves for å løse beregningskontroll- og designproblemer. Som et resultat kan brukere designe og flytte myke roboter med mer sofistikerte, spesifiserte algoritmer.
Systemets evne til å simulere interaksjoner med forskjellig terreng illustrerer viktigheten av morfologi, en gren av biologien som studerer former, størrelser og former for forskjellige organismer. Avhengig av miljøet er noen biologiske strukturer mer optimale enn andre, omtrent som å sammenligne tegninger for maskiner som utfører lignende oppgaver.
Disse biologiske konturene kan inspirere til mer spesialisert, terrengspesifikt kunstig liv. "En manet sin forsiktig bølgende geometri gjør at den effektivt kan reise over store vannmasser, noe som inspirerer forskere til å utvikle nye raser av myke roboter og åpner for ubegrensede muligheter for hva kunstige skapninger dyrket helt i silico kan være i stand til," sier Wang. «I tillegg kan øyenstikkere utføre svært smidige manøvrer som andre flygende skapninger ikke kan fullføre fordi de har spesielle strukturer på vingene som endrer massesenteret når de flyr. Plattformen vår optimaliserer bevegelsen på samme måte som en øyenstikker naturlig nok er flinkere til å jobbe gjennom omgivelsene.» Roboter slet tidligere med å navigere gjennom rotete miljøer fordi kroppen deres ikke var kompatibel med omgivelsene. Med SoftZoo kunne designere imidlertid utvikle robotens hjerne og kropp samtidig, og samtidig optimalisere både terrestriske og akvatiske maskiner for å være mer bevisste og spesialiserte. Med økt atferdsmessig og morfologisk intelligens vil robotene da være mer nyttige for å fullføre redningsoppdrag og utføre utforskning. Hvis en person ble savnet under en flom, for eksempel, kan roboten potensielt krysse vannet mer effektivt fordi den ble optimalisert ved hjelp av metoder demonstrert i SotftZoo-plattformen.
"SoftZoo tilbyr åpen kildekode-simulering for myke robotdesignere, og hjelper dem med å bygge virkelige roboter mye enklere og mer fleksibelt samtidig som de akselererer maskinenes bevegelsesevne i forskjellige miljøer," legger studiemedforfatter Chuang Gan, en forsker ved MIT til. -IBM Watson AI Lab som snart blir assisterende professor ved University of Massachusetts i Amherst.
"Denne beregningsmessige tilnærmingen til å samdesigne de myke robotkroppene og hjernen deres (det vil si kontrollerene deres) åpner døren for raskt å lage tilpassede maskiner som er designet for en spesifikk oppgave," legger Daniela Rus, direktør for CSAIL og Andrew og Erna Viterbi Professor ved MIT-avdelingen for elektroteknikk og informatikk (EECS), som er en annen forfatter av verket.
Før noen type robot er konstruert, kan rammeverket være en erstatning for felttesting av unaturlige scener. For eksempel kan det være utfordrende å vurdere hvordan en bjørnelignende robot oppfører seg i en ørken for et forskerteam som jobber i de urbane slettene i Boston. I stedet kan ingeniører innen myk robotikk bruke 3D-modeller i SoftZoo for å simulere forskjellige design og evaluere hvor effektive algoritmene som kontrollerer robotene deres er ved navigering. Dette vil i sin tur spare forskerne tid og ressurser.
Likevel står begrensningene til dagens fabrikasjonsteknikker i veien for å bringe disse myke robotdesignene til live. "Overføring fra simulering til fysisk robot forblir uløst og krever videre studier," sier Wang. "Muskelmodellene, romlig varierende stivhet og sensorisering i SoftZoo kan ikke enkelt realiseres med dagens fabrikasjonsteknikker, så vi jobber med disse utfordringene." I fremtiden ser plattformens designere på applikasjoner innen menneskelig mekanikk, for eksempel manipulasjon, gitt dens evne til å teste robotkontroll. For å demonstrere dette potensialet designet Wangs team en 3D-arm som kaster en snøball fremover.
Forskere utviklet et system for myk robot-co-design, som betyr i fellesskap å søke og optimalisere for robotdesign — formen på roboten, hvor man skal legge muskler i robotkroppen, hvor myk roboten er i ulike kroppsregioner; og basert på robotdesignet, måten å kontrollere den for å oppnå en måloppgave. (Bilde: Alex Shipps/MIT CSAIL og forskerne) Plattformen tar en tur på villsiden og har 3D-modeller av dyr som pandabjørner, fisker, haier og larver som design som kan simulere myke robotikkoppgaver som bevegelse , smidig svinging og stifølging i forskjellige miljøer. Enten ved snø, ørken, leire eller vann, demonstrerer plattformen ytelsesavveiningene til forskjellige design i forskjellige terreng.
"Rammeverket vårt kan hjelpe brukere med å finne den beste konfigurasjonen for en robots form, slik at de kan designe myke robotikkalgoritmer som kan gjøre mange forskjellige ting," sier MIT PhD-student Tsun-Hsuan Wang, en tilknyttet Computer Science and Artificial Intelligence Laboratory ( CSAIL) som er ledende forsker på prosjektet. "I hovedsak hjelper det oss å forstå de beste strategiene for roboter til å samhandle med miljøene deres." SoftZoo er mer omfattende enn lignende plattformer, som allerede simulerer design og kontroll, fordi den modellerer bevegelser som reagerer på de fysiske egenskapene til ulike biomer. Rammeverkets allsidighet kommer fra en differensierbar multifysikkmotor, som muliggjør simulering av flere aspekter av et fysisk system på samme tid, for eksempel en babysel som snur seg på is eller en larve som beveger seg over et våtmarksmiljø. Motorens differensierbarhet optimerer co-design ved å redusere antall ofte kostbare simuleringer som kreves for å løse beregningskontroll- og designproblemer. Som et resultat kan brukere designe og flytte myke roboter med mer sofistikerte, spesifiserte algoritmer.
Systemets evne til å simulere interaksjoner med forskjellig terreng illustrerer viktigheten av morfologi, en gren av biologien som studerer former, størrelser og former for forskjellige organismer. Avhengig av miljøet er noen biologiske strukturer mer optimale enn andre, omtrent som å sammenligne tegninger for maskiner som utfører lignende oppgaver.
Disse biologiske konturene kan inspirere til mer spesialisert, terrengspesifikt kunstig liv. "En manet sin forsiktig bølgende geometri gjør at den effektivt kan reise over store vannmasser, noe som inspirerer forskere til å utvikle nye raser av myke roboter og åpner for ubegrensede muligheter for hva kunstige skapninger dyrket helt i silico kan være i stand til," sier Wang. «I tillegg kan øyenstikkere utføre svært smidige manøvrer som andre flygende skapninger ikke kan fullføre fordi de har spesielle strukturer på vingene som endrer massesenteret når de flyr. Plattformen vår optimaliserer bevegelsen på samme måte som en øyenstikker naturlig nok er flinkere til å jobbe gjennom omgivelsene.» Roboter slet tidligere med å navigere gjennom rotete miljøer fordi kroppen deres ikke var kompatibel med omgivelsene. Med SoftZoo kunne designere imidlertid utvikle robotens hjerne og kropp samtidig, og samtidig optimalisere både terrestriske og akvatiske maskiner for å være mer bevisste og spesialiserte. Med økt atferdsmessig og morfologisk intelligens vil robotene da være mer nyttige for å fullføre redningsoppdrag og utføre utforskning. Hvis en person ble savnet under en flom, for eksempel, kan roboten potensielt krysse vannet mer effektivt fordi den ble optimalisert ved hjelp av metoder demonstrert i SotftZoo-plattformen.
"SoftZoo tilbyr åpen kildekode-simulering for myke robotdesignere, og hjelper dem med å bygge virkelige roboter mye enklere og mer fleksibelt samtidig som de akselererer maskinenes bevegelsesevne i forskjellige miljøer," legger studiemedforfatter Chuang Gan, en forsker ved MIT til. -IBM Watson AI Lab som snart blir assisterende professor ved University of Massachusetts i Amherst.
"Denne beregningsmessige tilnærmingen til å samdesigne de myke robotkroppene og hjernen deres (det vil si kontrollerene deres) åpner døren for raskt å lage tilpassede maskiner som er designet for en spesifikk oppgave," legger Daniela Rus, direktør for CSAIL og Andrew og Erna Viterbi Professor ved MIT-avdelingen for elektroteknikk og informatikk (EECS), som er en annen forfatter av verket.
Før noen type robot er konstruert, kan rammeverket være en erstatning for felttesting av unaturlige scener. For eksempel kan det være utfordrende å vurdere hvordan en bjørnelignende robot oppfører seg i en ørken for et forskerteam som jobber i de urbane slettene i Boston. I stedet kan ingeniører innen myk robotikk bruke 3D-modeller i SoftZoo for å simulere forskjellige design og evaluere hvor effektive algoritmene som kontrollerer robotene deres er ved navigering. Dette vil i sin tur spare forskerne tid og ressurser.
Likevel står begrensningene til dagens fabrikasjonsteknikker i veien for å bringe disse myke robotdesignene til live. "Overføring fra simulering til fysisk robot forblir uløst og krever videre studier," sier Wang. "Muskelmodellene, romlig varierende stivhet og sensorisering i SoftZoo kan ikke enkelt realiseres med dagens fabrikasjonsteknikker, så vi jobber med disse utfordringene." I fremtiden ser plattformens designere på applikasjoner innen menneskelig mekanikk, for eksempel manipulasjon, gitt dens evne til å teste robotkontroll. For å demonstrere dette potensialet designet Wangs team en 3D-arm som kaster en snøball fremover.
Forskere utviklet et system for myk robot-co-design, som betyr i fellesskap å søke og optimalisere for robotdesign — formen på roboten, hvor man skal legge muskler i robotkroppen, hvor myk roboten er i ulike kroppsregioner; og basert på robotdesignet, måten å kontrollere den for å oppnå en måloppgave. (Bilde: Alex Shipps/MIT CSAIL og forskerne) Plattformen tar en tur på villsiden og har 3D-modeller av dyr som pandabjørner, fisker, haier og larver som design som kan simulere myke robotikkoppgaver som bevegelse , smidig svinging og stifølging i forskjellige miljøer. Enten ved snø, ørken, leire eller vann, demonstrerer plattformen ytelsesavveiningene til forskjellige design i forskjellige terreng.
"Rammeverket vårt kan hjelpe brukere med å finne den beste konfigurasjonen for en robots form, slik at de kan designe myke robotikkalgoritmer som kan gjøre mange forskjellige ting," sier MIT PhD-student Tsun-Hsuan Wang, en tilknyttet Computer Science and Artificial Intelligence Laboratory ( CSAIL) som er ledende forsker på prosjektet. "I hovedsak hjelper det oss å forstå de beste strategiene for roboter til å samhandle med miljøene deres." SoftZoo er mer omfattende enn lignende plattformer, som allerede simulerer design og kontroll, fordi den modellerer bevegelser som reagerer på de fysiske egenskapene til ulike biomer. Rammeverkets allsidighet kommer fra en differensierbar multifysikkmotor, som muliggjør simulering av flere aspekter av et fysisk system på samme tid, for eksempel en babysel som snur seg på is eller en larve som beveger seg over et våtmarksmiljø. Motorens differensierbarhet optimerer co-design ved å redusere antall ofte kostbare simuleringer som kreves for å løse beregningskontroll- og designproblemer. Som et resultat kan brukere designe og flytte myke roboter med mer sofistikerte, spesifiserte algoritmer.
Systemets evne til å simulere interaksjoner med forskjellig terreng illustrerer viktigheten av morfologi, en gren av biologien som studerer former, størrelser og former for forskjellige organismer. Avhengig av miljøet er noen biologiske strukturer mer optimale enn andre, omtrent som å sammenligne tegninger for maskiner som utfører lignende oppgaver.
Disse biologiske konturene kan inspirere til mer spesialisert, terrengspesifikt kunstig liv. "En manet sin forsiktig bølgende geometri gjør at den effektivt kan reise over store vannmasser, noe som inspirerer forskere til å utvikle nye raser av myke roboter og åpner for ubegrensede muligheter for hva kunstige skapninger dyrket helt i silico kan være i stand til," sier Wang. «I tillegg kan øyenstikkere utføre svært smidige manøvrer som andre flygende skapninger ikke kan fullføre fordi de har spesielle strukturer på vingene som endrer massesenteret når de flyr. Plattformen vår optimaliserer bevegelsen på samme måte som en øyenstikker naturlig nok er flinkere til å jobbe gjennom omgivelsene.» Roboter slet tidligere med å navigere gjennom rotete miljøer fordi kroppen deres ikke var kompatibel med omgivelsene. Med SoftZoo kunne designere imidlertid utvikle robotens hjerne og kropp samtidig, og samtidig optimalisere både terrestriske og akvatiske maskiner for å være mer bevisste og spesialiserte. Med økt atferdsmessig og morfologisk intelligens vil robotene da være mer nyttige for å fullføre redningsoppdrag og utføre utforskning. Hvis en person ble savnet under en flom, for eksempel, kan roboten potensielt krysse vannet mer effektivt fordi den ble optimalisert ved hjelp av metoder demonstrert i SotftZoo-plattformen.
"SoftZoo tilbyr åpen kildekode-simulering for myke robotdesignere, og hjelper dem med å bygge virkelige roboter mye enklere og mer fleksibelt samtidig som de akselererer maskinenes bevegelsesevne i forskjellige miljøer," legger studiemedforfatter Chuang Gan, en forsker ved MIT til. -IBM Watson AI Lab som snart blir assisterende professor ved University of Massachusetts i Amherst.
"Denne beregningsmessige tilnærmingen til å samdesigne de myke robotkroppene og hjernen deres (det vil si kontrollerene deres) åpner døren for raskt å lage tilpassede maskiner som er designet for en spesifikk oppgave," legger Daniela Rus, direktør for CSAIL og Andrew og Erna Viterbi Professor ved MIT-avdelingen for elektroteknikk og informatikk (EECS), som er en annen forfatter av verket.
Før noen type robot er konstruert, kan rammeverket være en erstatning for felttesting av unaturlige scener. For eksempel kan det være utfordrende å vurdere hvordan en bjørnelignende robot oppfører seg i en ørken for et forskerteam som jobber i de urbane slettene i Boston. I stedet kan ingeniører innen myk robotikk bruke 3D-modeller i SoftZoo for å simulere forskjellige design og evaluere hvor effektive algoritmene som kontrollerer robotene deres er ved navigering. Dette vil i sin tur spare forskerne tid og ressurser.
Likevel står begrensningene til dagens fabrikasjonsteknikker i veien for å bringe disse myke robotdesignene til live. "Overføring fra simulering til fysisk robot forblir uløst og krever videre studier," sier Wang. "Muskelmodellene, romlig varierende stivhet og sensorisering i SoftZoo kan ikke enkelt realiseres med dagens fabrikasjonsteknikker, så vi jobber med disse utfordringene." I fremtiden ser plattformens designere på applikasjoner innen menneskelig mekanikk, for eksempel manipulasjon, gitt dens evne til å teste robotkontroll. For å demonstrere dette potensialet designet Wangs team en 3D-arm som kaster en snøball fremover.
- SEO-drevet innhold og PR-distribusjon. Bli forsterket i dag.
- PlatoAiStream. Web3 Data Intelligence. Kunnskap forsterket. Tilgang her.
- Minting the Future med Adryenn Ashley. Tilgang her.
- kilde: https://www.nanowerk.com/news2/robotics/newsid=62936.php
- : har
- :er
- :ikke
- :hvor
- $OPP
- 10
- 11
- 12
- 8
- 9
- a
- evne
- akselerer
- Oppnå
- tvers
- Legger
- vedtatt
- Partnerskap
- smidig
- AI
- alex
- algoritmer
- tillate
- tillater
- allerede
- an
- og
- Andrew
- dyr
- En annen
- noen
- søknader
- tilnærming
- ER
- ARM
- armer
- kunstig
- kunstig intelligens
- AS
- aspekter
- vurdere
- Assistent
- At
- forfatter
- automatisk
- Baby
- basert
- BE
- Bears
- fordi
- vært
- før du
- BEST
- biologi
- kroppen
- boston
- både
- Brain
- hjerner
- Branch
- Bringe
- bygge
- Bygning
- by
- CAN
- kan ikke
- evner
- stand
- sentrum
- utfordringer
- utfordrende
- endring
- Medforfatter
- kommer
- sammenligne
- fullføre
- fullført
- kompatibel
- omfattende
- datamaskin
- informatikk
- gjennomføre
- Konfigurasjon
- kontroll
- kontrollerende
- kunne
- Opprette
- CSAIL
- Gjeldende
- tilpasset
- Dato
- demonstrere
- demonstrert
- demonstrerer
- Avdeling
- avhengig
- ØRKEN
- utforming
- designet
- designere
- design
- bestemmes
- utvikle
- utviklet
- utvikle
- forskjellig
- Regissør
- diverse
- do
- Av
- øyenstikkere
- Dragonfly
- under
- lett
- Effektiv
- effektivt
- elektroteknikk
- muliggjør
- Motor
- Ingeniørarbeid
- Ingeniører
- fullstendig
- Miljø
- miljøer
- essens
- evaluere
- Selv
- eksempel
- dyrt
- leting
- Egenskaper
- felt
- Finn
- fleksibel
- flom
- flying
- etter
- Til
- skjemaer
- Forward
- Rammeverk
- fra
- videre
- framtid
- generere
- geometri
- gitt
- gripe
- Ha
- hjelpe
- hjelpe
- hjelper
- Hvordan
- HTTPS
- menneskelig
- ICE
- if
- illustrerer
- bilde
- betydning
- bedre
- in
- Inkludert
- økt
- inspirasjon
- inspirere
- inspirerende
- i stedet
- Intelligens
- samhandle
- interaksjoner
- IT
- DET ER
- jpg
- lab
- laboratorium
- stor
- føre
- Life
- i likhet med
- begrensninger
- Se
- ser ut som
- maskiner
- Manipulasjon
- mange
- Mass
- massachusetts
- Kan..
- midler
- mekanikk
- metoder
- Middle
- mangler
- oppdrag
- MIT
- modeller
- mer
- bevegelse
- flytte
- bevegelse
- mye
- Naviger
- Navigasjon
- Ny
- Antall
- gjenstander
- of
- ofte
- on
- ONE
- åpen kildekode
- åpning
- åpner
- optimal
- optimalisert
- Optimaliserer
- optimalisere
- or
- Annen
- andre
- vår
- skisserer
- banen
- utføre
- ytelse
- person
- fysisk
- plattform
- Plattformer
- plato
- Platon Data Intelligence
- PlatonData
- muligheter
- potensiell
- potensielt
- tidligere
- problemer
- Professor
- prosjekt
- gir
- sette
- raskt
- reagerer
- virkelige verden
- realisert
- redusere
- regioner
- rehabilitering
- forblir
- påkrevd
- Krever
- redde
- forskning
- forsker
- forskere
- Ressurser
- resultere
- robot
- robotikk
- roboter
- samme
- Spar
- sier
- Scener
- Vitenskap
- Forsker
- søker
- flere
- Form
- figurer
- Sharks
- side
- lignende
- simulering
- samtidig
- siden
- størrelser
- snø
- So
- Soft
- LØSE
- noen
- Snart
- sofistikert
- kilde
- Rom
- spesiell
- spesialisert
- spesifikk
- spesifisert
- stable
- stå
- Trinn
- Still
- strategier
- Student
- studier
- Studer
- slik
- system
- ta
- Target
- Oppgave
- oppgaver
- lag
- teknikker
- bakkenett
- test
- Testing
- enn
- Det
- De
- Fremtiden
- deres
- Dem
- deretter
- Disse
- de
- ting
- denne
- selv om?
- Gjennom
- Kaster
- tid
- til
- reiser
- SVING
- Turning
- typen
- forstå
- universitet
- ubegrenset
- Urban
- us
- bruke
- Brukere
- ved hjelp av
- ulike
- veldig
- var
- Vann
- Waters
- Watson
- Vei..
- we
- var
- Hva
- når
- om
- hvilken
- mens
- HVEM
- Wild
- Wildlife
- vil
- med
- Arbeid
- arbeid
- ville
- zephyrnet
Mer fra Nanowerk

Forskere oppdager en ny metode for å generere metallnanopartikler for bruk som katalysatorer
Kilde node: 3039388
Tidstempel: Desember 28, 2023

Veilede utformingen av silisiumenheter med forbedret effektivitet
Kilde node: 2839986
Tidstempel: August 23, 2023
Robotbier og røtter gir håp om sunnere miljø og tilstrekkelig mat
Kilde node: 1977685
Tidstempel: Februar 25, 2023

Karbonmateriale i nanostørrelse kan brukes til å behandle Downs syndrom
Kilde node: 2778869
Tidstempel: Juli 21, 2023
En nevromorf synapse laget av kjernematerialer for OLED-TVer
Kilde node: 2541090
Tidstempel: Mar 24, 2023

Akselererer bærekraftige halvledere med "multielement ink"
Kilde node: 2911790
Tidstempel: September 28, 2023
Lysdrevet nanokatalysator for å lage hydrogen ved hjelp av sollys
Kilde node: 3053672
Tidstempel: Jan 10, 2024
Forskere observerer overgang til kaotisk oppførsel på nanometerskalaen
Kilde node: 1982382
Tidstempel: Februar 27, 2023

Roboter og AI slår seg sammen for å oppdage svært selektive katalysatorer
Kilde node: 1940293
Tidstempel: Februar 3, 2023