HELSINKI - Japans SLIM lander nådde målet om en nøyaktig månelandingsmåne med bare en av to hovedthrustere i drift, uttalte JAXA torsdag, mens en liten rover returnerte et bilde av romfartøyet.
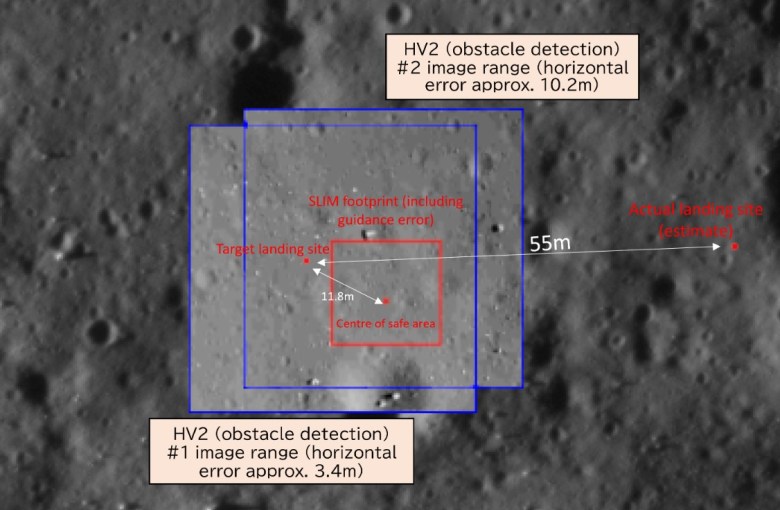
SLIM foretok en presis landing kl. 25.24889 øst, 13.31549 sør på skråningen av Shioli-krateret, 55 meter fra målpunktet, sa Shinichiro Sakai, prosjektleder for SLIM-teamet hos JAXA, under en pressekonferanse tidlig torsdag (25. januar), og fullførte en viktige oppdragskriterium.
Byrået tok sikte på en høypresisjonslanding, definert som å være innenfor 100 meter fra målpunktet.
SLIM gjorde sitt historisk månelanding 19. januar, også med hell slippe et par små rovere ut på overflaten rett før touchdown. Den SLIM-landingen gjorde Japan til det femte landet som landet på månen, men problemer med kraftproduksjon betydde at romfartøyets aktive tid på overflaten var kutt. Håpet er imidlertid fortsatt at SLIM kan reaktiveres før slutten av måneden.
Sakai avslørte imidlertid at en av de to hovedthrusterne sannsynligvis sviktet under den siste landingsfasen. Dette fant sted fra en høyde på 50 meter til touchdown, noe som resulterte i utilsiktet sidebevegelse over.
"Under disse omstendighetene identifiserer SLIM-programvaren ombord uregelmessigheten, og mens den kontrollerte den horisontale posisjonen så mye som mulig, fortsatte SLIM nedstigningen med den andre motoren og beveget seg gradvis mot øst."
SLIM-landingen var ment å skje i to trinn. Først med landende thrustere nede, deretter en mindre thruster som skyter for å tippe romfartøyet over på siden. SLIM blir deretter polstret av fem knusbare, 3D-printede landingsben i aluminiumsgitter.
Et bilde av SLIM tatt av en av roverne, Transformable Lunar Robot LEV-2, avslører at romfartøyet er på månens overflate med thrusteren pekende oppover. Årsaken til den tilsynelatende motorfeilen blir undersøkt.
Landingsholdningen betydde at SLIMs solcellepanel vender vestover, noe som resulterte i at den i utgangspunktet ikke mottar sollys. JAXA sier imidlertid at det er en mulighet for at solcellene kan generere strøm i løpet av månekvelden ettersom belysningen forbedres.
"Selv om SLIMs aktiviteter på Månen opprinnelig var forventet å vare bare noen få dager, vil de nødvendige forberedelsene for utvinning fortsette for å innhente ytterligere tekniske og vitenskapelige data," en uttalelse lese.
Situasjonen minner om Philae-landeren som en del av Europas Rosetta-oppdrag. Philae spratt da han gjorde sitt landingsforsøk på Comet 67P i 2014. Den fikk også problemer med belysning før den våknet opp igjen.
JAXA har tidligere uttalt at SLIM koblet fra batteriet med 12 %, som planlagt, for å forhindre overutlading. SLIM ble slått av klokken 12:57 østlig (1757 UTC) 19. januar, bare to og en halv time etter landing klokken 10:20 østlig (1520 UTC).
Multiband spektroskopisk kamera (MBC) montert på SLIM var i stand til å operere på prøvebasis og ta bilder før strømmen ble slått av. JAXA publisert et MBC-bilde laget ved å syntetisere 257 lavoppløselige monokrome bilder. MBC vil bli satt i verk hvis SLIM kan reaktiveres.
"Forberedelser er i gang for omgående å utføre 10-bånds høyoppløselige spektroskopiske observasjoner når solbelysningstilstanden forbedres og SLIM gjenoppretter av kraften generert av solcellepanelet," sa JAXA.
Den 2.1 kilo tunge Lunar Excursion Vehicle (LEV-1) lille rover gjennomførte med suksess aktiviteter på måneoverflaten, inkludert utførte planlagte sprangbevegelser. LEV-1 oppnådde direkte kommunikasjon med bakkestasjoner, inkludert en inter-robot testradiobølgedataoverføring fra LEV-2. Bildeanskaffelse av LEV-1 er ikke bekreftet per nå, ifølge JAXA.
LEV-1 er i standby-tilstand på månens overflate. "Selv om evnen til å gjenoppta aktiviteten eksisterer avhengig av solenergiproduksjon fra endringer i solens retning, vil innsatsen opprettholdes for å fortsette å motta signaler fra LEV-1," sa JAXA.
Den baseball-størrelse, 0.25 kg LEV-2 rover, med kallenavnet SORA-Q, ble kjørt på månens overflate og avbildet SLIM. "Vi analyserer for tiden andre data, inkludert kjørelogger, og planlegger å publisere resultatene i fremtiden," bemerket JAXA i en uttalelse på roveren.
LEV-2 ble utviklet i fellesskap av JAXA, Tomy, Sony og Doshisha University. Det er den minste og letteste måne-roveren noensinne, ifølge JAXA.
"LEV-2 "SORA-Q", som ble utviklet ved å kombinere leketøysteknologi, den nyeste sensorrobotteknologien og JAXAs romteknologi, og har utmerkede autonome operasjons- og bevegelsesegenskaper," sa JAXA Space Exploration Innovation Hub-direktør Kazuyuki Funaki.
Solnedgang over Shioli-krateret er forventet rundt tidlig UTC 31. januar. Verken SLIM eller dets rovere har radioisotopvarmeenheter. Dermed forventes de ikke å overleve månens nattetid, når temperaturene vil falle til rundt minus 130 Celsius.
- SEO-drevet innhold og PR-distribusjon. Bli forsterket i dag.
- PlatoData.Network Vertical Generative Ai. Styrk deg selv. Tilgang her.
- PlatoAiStream. Web3 Intelligence. Kunnskap forsterket. Tilgang her.
- PlatoESG. Karbon, CleanTech, Energi, Miljø, Solenergi, Avfallshåndtering. Tilgang her.
- PlatoHelse. Bioteknologisk og klinisk etterretning. Tilgang her.
- kilde: https://spacenews.com/japans-slim-achieved-pinpoint-moon-landing-with-just-one-working-engine/
- : har
- :er
- :ikke
- ][s
- 1
- 10
- 100
- 12
- 13
- 130
- 19
- 20
- 2014
- 25
- 31
- 50
- a
- I stand
- ovenfor
- Ifølge
- nøyaktig
- oppnådd
- erverve
- ervervet
- oppkjøp
- Handling
- aktiv
- Aktiviteter
- aktivitet
- Etter
- byrå
- sikte
- også
- an
- analyserer
- og
- tilsynelatende
- ER
- rundt
- Array
- AS
- At
- forsøk
- holdning
- autonom
- autonomt
- basis
- batteri
- BE
- vært
- før du
- være
- kort
- men
- by
- rom
- CAN
- evne
- fangst
- fanget
- bære
- Årsak
- Celler
- Celsius
- Endringer
- egenskaper
- omstendigheter
- kombinere
- Kommunikasjon
- tilstand
- Gjennomføre
- gjennomført
- Konferanse
- BEKREFTET
- fortsette
- fortsatte
- kontrollerende
- land
- opprettet
- I dag
- polstret
- dato
- Dager
- definert
- utviklet
- direkte
- retning
- Regissør
- frakoblet
- ned
- drevet
- kjøring
- Drop
- under
- Tidlig
- øst
- østlige
- innsats
- elektrisitet
- slutt
- Motor
- Europas
- kveld
- NOEN GANG
- utmerket
- henrettet
- finnes
- forventet
- leting
- vendt
- Mislyktes
- Noen få
- femte
- slutt~~POS=TRUNC
- avfyring
- Først
- fem
- Til
- fra
- oppfylle
- videre
- framtid
- generere
- generert
- generasjonen
- mål
- gradvis
- Ground
- Halvparten
- høy oppløsning
- håp
- Horisontal
- TIMER
- Men
- HTML
- HTTPS
- Hub
- identifiserer
- if
- bilde
- bilder
- forbedrer
- in
- Inkludert
- indisk
- i utgangspunktet
- Innovasjon
- tiltenkt
- inn
- saker
- IT
- DET ER
- jan
- Japan
- Japans
- jpg
- bare
- bare én
- nøkkel
- Tomt
- landing
- Siste
- siste
- ben
- Sannsynlig
- Lunar
- laget
- Hoved
- Making
- leder
- max bredde
- MBC
- ment
- Oppdrag
- monokrom
- Måned
- Moon
- bevegelse
- flyttet
- bevegelser
- mye
- Navigasjon
- nødvendig
- Ingen
- eller
- bemerket
- nå
- observasjoner
- forekomme
- of
- off
- on
- Ombord
- gang
- ONE
- bare
- betjene
- drift
- drift
- rekkefølge
- opprinnelig
- Annen
- enn
- par
- del
- fase
- Bilder
- Sted
- fly
- planlagt
- plato
- Platon Data Intelligence
- PlatonData
- Point
- posisjon
- mulighet
- mulig
- makt
- powered
- presis
- trykk
- forebygge
- tidligere
- problemer
- prosjekt
- publisere
- sette
- radio
- mottak
- Gjen
- utvinning
- frigjør
- forblir
- minner
- resulterende
- Resultater
- gjenoppta
- Avslørt
- avslører
- robot
- robotikk
- rover
- Sa
- vitenskapelig
- sensor
- side
- signaler
- situasjon
- Slope
- liten
- mindre
- Software
- solenergi
- Solceller
- Solar Power
- Sony
- Sør
- Rom
- utforsking av verdensrommet
- romfartøyer
- Tilstand
- uttalte
- Stater
- Stasjoner
- Steps
- vellykket
- Sol
- sollys
- overflaten
- overleve
- tatt
- Target
- lag
- Teknisk
- Teknologi
- test
- Det
- De
- Fremtiden
- deretter
- Der.
- Disse
- de
- denne
- Torsdag
- Dermed
- tid
- typen
- til
- tok
- mot
- leketøy
- prøve
- snudde
- to
- underveis
- lomper
- universitet
- oppover
- UTC
- kjøretøy
- var
- Wave
- var
- når
- hvilken
- mens
- vil
- med
- innenfor
- arbeid
- zephyrnet