23. august 2023 (Nanowerk Nyheter) Kraftene til kunstig intelligens (AI) og roboteksperimentsystemer har kommet sammen i banebrytende proof-of-concept-arbeid ved National Institute for Materials Science (NIMS) i Japan.
Forskerne beskriver utviklingen og demonstrasjonen av deres "closed loop" automatiseringsprogramvare i tidsskriftet Vitenskap og teknologi for avanserte materialer: Metoder ("NIMS-OS: en automatiseringsprogramvare for å implementere en lukket sløyfe mellom kunstig intelligens og roboteksperimenter innen materialvitenskap").
"Det overordnede målet med arbeidet vårt er å la eksperimenter som utforsker materialvitenskap utformes og deretter fortsette automatisk, uten menneskelig innblanding," sier fysiker og programvareingeniør Ryo Tamura ved NIMS Center for Basic Research on Materials. AI utfører først informasjonsinnsamlingen og eksperimentelle designoppgaver som normalt utføres av mennesker, og kontrollerer deretter robotsystemene som kan utføre de nødvendige fysiske oppgavene.
Teamet demonstrerte potensialet til systemet deres ved å bruke det til å identifisere elektrolytter som ville være egnet for å formidle bevegelsen av ioner i litium-metallbatterier.
Programvaren, kalt NIMS Orchestration System (NIMS-OS), inneholder to grunnleggende typer moduler. Den første bruker AI-algoritmer for å utforske arkiverte data om egenskapene til materialer. Den velger lovende materialer og foreslår eksperimentelle prosedyrer som vil tillate dem å oppnå et ønsket mål. Den andre typen modul genererer instruksjonene som trengs for å kontrollere et robotsystem som vil sette instruksjonene ut i livet.
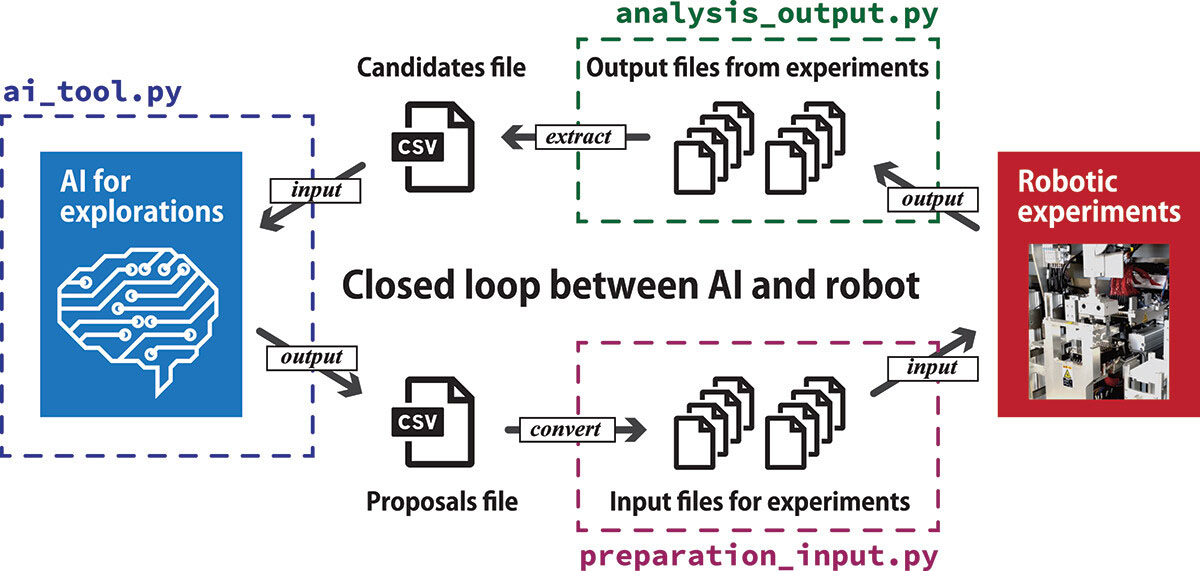 Prosedyrer i NIMS-OS og rollene til hvert Python-skript. (Bilde: NIMS)
For å gjøre hele prosessen så enkel å bruke som mulig for et bredt spekter av forskere, utviklet teamet også et brukervennlig grafisk brukergrensesnitt for å kontrollere det.
"Resultatene av det innledende arbeidet med robotsystemet via NIMS-OS kan mates tilbake for å avgrense AI-algoritmene som kontrollerer det, gjennom flere sykluser med test og forbedring," sier Tamura.
I proof-of-concept-oppgaven som undersøkte alternativer for å lage elektrolytter som maksimerer ytelsen til en elektrode i et litium-metallbatteri, brukte NIMS-OS systemer som ble robotisk satt sammen til elektrokjemiske celler og utsatt for lade- og utladingssykluser for å analysere deres opptreden. Resultatene identifiserte klart den bedre elektrolyttsammensetningen og indikerte at det er rom for forbedring av elektrolyttene som for tiden er mye brukt kommersielt.
"Vårt NIMS-OS er nå offentlig tilgjengelig som åpen kildekode-programvare på det mye brukte GitHub-nettstedet," sier Tamura. "Vi planlegger nå å utvikle den videre for å la den fungere sammen med mange forskjellige typer roboteksperimentsystemer."
Prosedyrer i NIMS-OS og rollene til hvert Python-skript. (Bilde: NIMS)
For å gjøre hele prosessen så enkel å bruke som mulig for et bredt spekter av forskere, utviklet teamet også et brukervennlig grafisk brukergrensesnitt for å kontrollere det.
"Resultatene av det innledende arbeidet med robotsystemet via NIMS-OS kan mates tilbake for å avgrense AI-algoritmene som kontrollerer det, gjennom flere sykluser med test og forbedring," sier Tamura.
I proof-of-concept-oppgaven som undersøkte alternativer for å lage elektrolytter som maksimerer ytelsen til en elektrode i et litium-metallbatteri, brukte NIMS-OS systemer som ble robotisk satt sammen til elektrokjemiske celler og utsatt for lade- og utladingssykluser for å analysere deres opptreden. Resultatene identifiserte klart den bedre elektrolyttsammensetningen og indikerte at det er rom for forbedring av elektrolyttene som for tiden er mye brukt kommersielt.
"Vårt NIMS-OS er nå offentlig tilgjengelig som åpen kildekode-programvare på det mye brukte GitHub-nettstedet," sier Tamura. "Vi planlegger nå å utvikle den videre for å la den fungere sammen med mange forskjellige typer roboteksperimentsystemer."
Prosedyrer i NIMS-OS og rollene til hvert Python-skript. (Bilde: NIMS)
For å gjøre hele prosessen så enkel å bruke som mulig for et bredt spekter av forskere, utviklet teamet også et brukervennlig grafisk brukergrensesnitt for å kontrollere det.
"Resultatene av det innledende arbeidet med robotsystemet via NIMS-OS kan mates tilbake for å avgrense AI-algoritmene som kontrollerer det, gjennom flere sykluser med test og forbedring," sier Tamura.
I proof-of-concept-oppgaven som undersøkte alternativer for å lage elektrolytter som maksimerer ytelsen til en elektrode i et litium-metallbatteri, brukte NIMS-OS systemer som ble robotisk satt sammen til elektrokjemiske celler og utsatt for lade- og utladingssykluser for å analysere deres opptreden. Resultatene identifiserte klart den bedre elektrolyttsammensetningen og indikerte at det er rom for forbedring av elektrolyttene som for tiden er mye brukt kommersielt.
"Vårt NIMS-OS er nå offentlig tilgjengelig som åpen kildekode-programvare på det mye brukte GitHub-nettstedet," sier Tamura. "Vi planlegger nå å utvikle den videre for å la den fungere sammen med mange forskjellige typer roboteksperimentsystemer."
- SEO-drevet innhold og PR-distribusjon. Bli forsterket i dag.
- PlatoData.Network Vertical Generative Ai. Styrk deg selv. Tilgang her.
- PlatoAiStream. Web3 Intelligence. Kunnskap forsterket. Tilgang her.
- PlatoESG. Bil / elbiler, Karbon, CleanTech, Energi, Miljø, Solenergi, Avfallshåndtering. Tilgang her.
- PlatoHelse. Bioteknologisk og klinisk etterretning. Tilgang her.
- ChartPrime. Hev handelsspillet ditt med ChartPrime. Tilgang her.
- BlockOffsets. Modernisering av eierskap for miljøkompensasjon. Tilgang her.
- kilde: https://www.nanowerk.com/news2/robotics/newsid=63531.php
- :er
- 10
- 2023
- 23
- 7
- 8
- a
- Oppnå
- avansert
- Avanserte materialer
- AI
- sikte
- algoritmer
- tillate
- også
- an
- analysere
- og
- ER
- kunstig
- kunstig intelligens
- AS
- montert
- At
- automatisk
- Automatisering
- tilgjengelig
- tilbake
- grunnleggende
- batterier
- batteri
- BE
- Bedre
- mellom
- by
- som heter
- CAN
- Celler
- sentrum
- lading
- klart
- stengt
- lukking
- Kom
- kommersielt
- sammensetning
- inneholder
- kontroll
- kontroller
- I dag
- sykluser
- dato
- Dato
- demonstrert
- beskrive
- utforming
- designet
- ønsket
- utvikle
- Utvikling
- forskjellig
- gjort
- hver enkelt
- lett
- lett-å-bruke
- elektrolytt
- elektrolytter
- ingeniør
- henrette
- eksperiment
- eksperimentell
- eksperimenter
- utforske
- utforsket
- Utforske
- Fed
- Først
- Til
- videre
- samle
- genererer
- GitHub
- Ha
- HTTPS
- menneskelig
- Mennesker
- identifisert
- identifisere
- bilde
- iverksette
- forbedring
- in
- indikert
- informasjon
- innledende
- Institute
- instruksjoner
- Intelligens
- Interface
- intervensjon
- inn
- IT
- Japan
- journal
- jpg
- gjøre
- Making
- mange
- materialer
- Maksimer
- Middle
- moduler
- Moduler
- bevegelse
- nasjonal
- nødvendig
- Nei.
- normalt
- nå
- of
- on
- åpen kildekode
- Programvare med åpen kildekode
- alternativer
- orkestre
- vår
- samlet
- ytelse
- utfører
- PHP
- fysisk
- Banebryt
- fly
- plato
- Platon Data Intelligence
- PlatonData
- mulig
- potensiell
- krefter
- praksis
- prosedyrer
- fortsette
- prosess
- lovende
- egenskaper
- foreslår
- offentlig
- sette
- Python
- område
- avgrense
- påkrevd
- forskning
- forskere
- Resultater
- roller
- rom
- sier
- Vitenskap
- skript
- Sekund
- flere
- Software
- Software Engineer
- egnet
- system
- Systemer
- Oppgave
- oppgaver
- lag
- Teknologi
- test
- Det
- De
- informasjonen
- deres
- Dem
- deretter
- Der.
- Gjennom
- til
- sammen
- to
- typen
- typer
- bruke
- brukt
- Bruker
- Brukergrensesnitt
- bruker
- ved hjelp av
- benyttes
- av
- Nettsted
- var
- hele
- bred
- Bred rekkevidde
- allment
- vil
- med
- Arbeid
- arbeide sammen
- ville
- zephyrnet
Mer fra Nanowerk
Enkelkjedede polymer-nanopartikler kan gi en lovende tilnærming i kampen mot malaria
Kilde node: 1777884
Tidstempel: Desember 19, 2022


Kunstig intelligens katalyserer genaktiveringsforskning og avdekker sjeldne DNA-sekvenser
Kilde node: 2665318
Tidstempel: Kan 19, 2023

Nanorobotisk system presenterer nye alternativer for å målrette mot soppinfeksjoner
Kilde node: 2680882
Tidstempel: Kan 26, 2023

Forskere observerer ekstremt sammenklemte retningsbestemte THz-bølger i tynne halvlederkrystaller
Kilde node: 2634890
Tidstempel: Kan 4, 2023
Belyse opprinnelsen til den fotovoltaiske effekten i organisk-uorganiske perovskitter
Kilde node: 3036090
Tidstempel: Desember 26, 2023
Forskere beskriver aldri tidligere sett egenskaper i en familie av superledende Kagome-metaller
Kilde node: 1952937
Tidstempel: Februar 11, 2023
Nano-dråper går på ski ved høye temperaturer (m/video)
Kilde node: 2875099
Tidstempel: September 11, 2023
Kobberbaserte 2D-katalysatorer omdanner effektivt karbondioksid til metan
Kilde node: 2899864
Tidstempel: September 25, 2023