HELSINKI - De Japanse SLIM-lander heeft zijn doel bereikt: een nauwkeurige maanlanding op de maan met slechts één van de twee hoofdmotoren in werking, aldus JAXA donderdag, terwijl een kleine rover een beeld van het ruimtevaartuig terugstuurde.
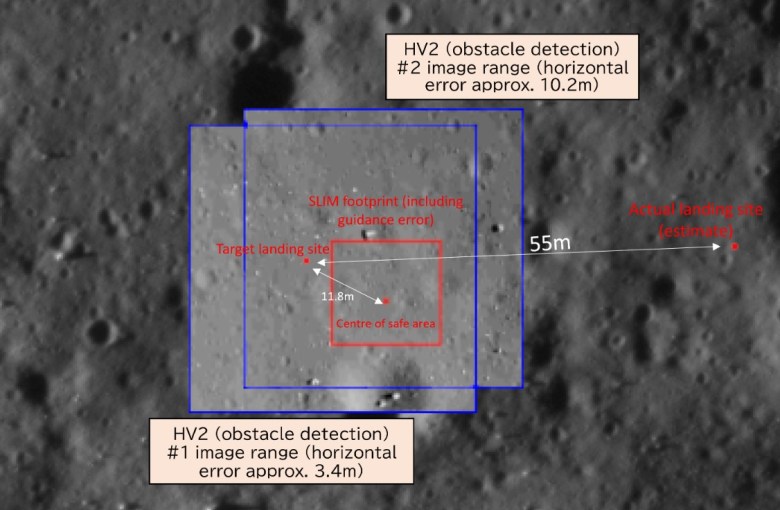
SLIM maakte een precieze landing op 25.24889 Oost, 13.31549 Zuid op de helling van de Shioli-krater, 55 meter van het doelpunt, zei Shinichiro Sakai, SLIM-teamprojectmanager bij JAXA, tijdens een persconferentie begin donderdag (25 januari), waarmee hij een belangrijkste missiecriterium.
Het bureau streefde naar een landing met hoge precisie, gedefinieerd als binnen 100 meter van het doelpunt.
SLIM heeft het gehaald historische maanlanding 19 januari, waarbij ook met succes een paar kleine rovers op het oppervlak werden losgelaten vlak voor de landing. Door de SLIM-landing was Japan het vijfde land dat op de maan landde, maar door problemen met de energieopwekking was de actieve tijd van het ruimtevaartuig aan de oppervlakte beperkt. afgebroken. Er blijft echter hoop dat SLIM voor het einde van de maand opnieuw kan worden geactiveerd.
Sakai onthulde echter dat een van de twee hoofdmotoren waarschijnlijk uitviel tijdens de laatste landingsfase. Dit vond plaats vanaf een hoogte van 50 meter tot aan de landing, waardoor er onbedoelde zijwaartse bewegingen naar boven ontstonden.
“Onder deze omstandigheden identificeert de SLIM-software aan boord de anomalie autonoom, en terwijl de horizontale positie zoveel mogelijk werd gecontroleerd, vervolgde SLIM de afdaling met de andere motor en bewoog geleidelijk naar het oosten.”
De SLIM-landing zou in twee stappen plaatsvinden. Eerst met de landingsschroeven naar beneden, daarna vuurde een kleinere boegschroef het ruimtevaartuig op zijn kant. SLIM wordt vervolgens opgevangen door vijf samendrukbare, 3D-geprinte landingspoten van aluminium traliewerk.
Een afbeelding van SLIM gemaakt door een van de rovers, Transformable Lunar Robot LEV-2, laat zien dat het ruimtevaartuig zich op het maanoppervlak bevindt met de stuwkracht naar boven gericht. Er wordt onderzoek gedaan naar de oorzaak van de kennelijke motorstoring.
Door de landingshouding was het zonnepaneel van SLIM naar het westen gericht, waardoor het aanvankelijk geen zonlicht ontving. JAXA stelt echter dat er een mogelijkheid bestaat dat de zonnecellen tijdens de maanavond elektriciteit kunnen opwekken als de verlichting verbetert.
“Hoewel oorspronkelijk werd verwacht dat de activiteiten van SLIM op de maan slechts een paar dagen zouden duren, zullen de noodzakelijke voorbereidingen voor het herstel worden voortgezet om verdere technische en wetenschappelijke gegevens te verkrijgen”, aldus een woordvoerder van het bedrijf. verklaring lezen.
De situatie doet denken aan de Philae-lander als onderdeel van de Europese Rosetta-missie. Philae stuiterde tijdens zijn landingspoging op komeet 67P in 2014. Hij had ook problemen met de verlichting voordat hij kortstondig weer ontwaakte.
JAXA verklaarde eerder dat SLIM de batterij, zoals gepland, bij 12% had losgekoppeld om overmatige ontlading te voorkomen. SLIM werd uitgeschakeld om 12:57 uur Eastern (1757 UTC) op 19 januari, slechts twee en een half uur na de landing om 10:20 uur Eastern (1520 UTC).
De op SLIM gemonteerde multiband spectroscopische camera (MBC) kon op proef werken en beelden vastleggen voordat de stroom werd uitgeschakeld. JAXA gepubliceerde een MBC-afbeelding gemaakt door 257 monochrome afbeeldingen met lage resolutie te synthetiseren. MBC zal in actie worden gebracht als SLIM opnieuw kan worden geactiveerd.
"Er zijn voorbereidingen gaande om onmiddellijk 10-bands spectroscopische waarnemingen met hoge resolutie uit te voeren zodra de verlichtingstoestand van de zon verbetert en SLIM herstelt door de stroom die door de zonnepanelen wordt gegenereerd", aldus JAXA.
De kleine rover Lunar Excursion Vehicle (LEV-2.1) van 1 kilogram voerde met succes activiteiten uit op het maanoppervlak, inclusief geplande springbewegingen. LEV-1 bereikte directe communicatie met grondstations, inclusief een inter-robot testradiogolfdatatransmissie van LEV-2. Volgens JAXA is beeldacquisitie door LEV-1 tot nu toe niet bevestigd.
LEV-1 bevindt zich in een standby-status op het maanoppervlak. “Hoewel de mogelijkheid om de activiteit te hervatten afhankelijk is van de opwekking van zonne-energie door veranderingen in de richting van de zon, zullen de inspanningen worden voortgezet om signalen van LEV-1 te blijven ontvangen”, aldus JAXA.
De LEV-0.25-rover ter grootte van een honkbal, bijgenaamd SORA-Q, werd op het maanoppervlak gereden en bracht SLIM in beeld. “We analyseren momenteel andere gegevens, waaronder rijlogboeken, en zijn van plan de resultaten in de toekomst te publiceren”, merkte JAXA op in een verklaring op de rover.
LEV-2 is gezamenlijk ontwikkeld door JAXA, Tomy, Sony en Doshisha University. Volgens JAXA is het de kleinste en lichtste maanrover ooit.
“De LEV-2 “SORA-Q”, die is ontwikkeld door speelgoedtechnologie, de nieuwste sensorrobottechnologie en JAXA’s ruimtetechnologie te combineren, en uitstekende autonome werkings- en bewegingseigenschappen heeft”, aldus JAXA Space Exploration Innovation Hub-directeur Kazuyuki Funaki.
Zonsondergang boven de Shioli-krater wordt rond 31 januari UTC verwacht. Noch SLIM, noch zijn rovers hebben radio-isotopenverwarmers bij zich. Er wordt dus niet verwacht dat ze de maannacht zullen overleven, wanneer de temperatuur zal dalen tot ongeveer min 130 graden Celsius.
- Door SEO aangedreven content en PR-distributie. Word vandaag nog versterkt.
- PlatoData.Network Verticale generatieve AI. Versterk jezelf. Toegang hier.
- PlatoAiStream. Web3-intelligentie. Kennis versterkt. Toegang hier.
- PlatoESG. carbon, CleanTech, Energie, Milieu, Zonne, Afvalbeheer. Toegang hier.
- Plato Gezondheid. Intelligentie op het gebied van biotech en klinische proeven. Toegang hier.
- Bron: https://spacenews.com/japans-slim-achieved-pinpoint-moon-landing-with-just-one-working-engine/
- : heeft
- :is
- :niet
- ][P
- 1
- 10
- 100
- 12
- 13
- 130
- 19
- 20
- 2014
- 25
- 31
- 50
- a
- in staat
- boven
- Volgens
- accuraat
- bereikt
- verwerven
- verworven
- acquisitie
- Actie
- actieve
- activiteiten
- activiteit
- Na
- agentschap
- Gericht
- ook
- an
- het analyseren van
- en
- schijnbaar
- ZIJN
- rond
- reeks
- AS
- At
- poging
- houding
- autonoom
- autonoom
- basis
- Accu
- BE
- geweest
- vaardigheden
- wezen
- kort
- maar
- by
- camera
- CAN
- bekwaamheid
- vangen
- gevangen
- dragen
- Veroorzaken
- Cellen
- Celsius
- Wijzigingen
- kenmerken
- situatie
- combineren
- Communicatie
- voorwaarde
- Gedrag
- uitgevoerd
- Conferentie
- BEVESTIGD
- voortzetten
- voortgezet
- het regelen van
- Land
- aangemaakt
- Op dit moment
- gedempt
- gegevens
- dagen
- gedefinieerd
- ontwikkelde
- directe
- richting
- Director
- losgekoppeld
- beneden
- gedreven
- aandrijving
- Val
- gedurende
- Vroeg
- oosten
- oostelijk
- inspanningen
- elektriciteit
- einde
- Motor
- Europa's
- avond
- OOIT
- uitstekend
- uitgevoerd
- bestaat
- verwacht
- exploratie
- naar
- Mislukt
- weinig
- vijfde
- finale
- vuren
- Voornaam*
- vijf
- Voor
- oppompen van
- vervullen van
- verder
- toekomst
- voortbrengen
- gegenereerde
- generatie
- doel
- geleidelijk
- Ground
- Helft
- hoge-resolutie
- hoop
- Horizontaal
- HOURS
- Echter
- HTML
- HTTPS
- Naaf
- identificeert
- if
- beeld
- afbeeldingen
- verbetert
- in
- Inclusief
- Indian
- eerste
- Innovatie
- bestemde
- in
- problemen
- IT
- HAAR
- jan
- Japan
- Japan's
- jpg
- voor slechts
- eentje maar
- sleutel
- Land
- landing
- Achternaam*
- laatste
- benen
- Waarschijnlijk
- Maan-
- gemaakt
- Hoofd
- maken
- manager
- max-width
- MBC
- betekende
- Missie
- zwart-wit
- Maand
- Moon
- beweging
- verplaatst
- bewegingen
- veel
- Navigatie
- noodzakelijk
- Noch
- noch
- bekend
- nu
- observatie
- zich voordoen
- of
- korting
- on
- Aan boord
- eens
- EEN
- Slechts
- besturen
- werkzaam
- operatie
- bestellen
- oorspronkelijk
- Overige
- over
- paar
- deel
- fase
- Foto's
- plaats
- plan
- gepland
- Plato
- Plato gegevensintelligentie
- PlatoData
- punt
- positie
- mogelijkheid
- mogelijk
- energie
- aangedreven
- nauwkeurig
- pers
- voorkomen
- die eerder
- problemen
- project
- publiceren
- zetten
- Radio
- ontvangende
- Herstelt
- na een training
- het vrijgeven van
- stoffelijk overschot
- die doet denken
- verkregen
- Resultaten
- hervat
- Revealed
- onthult
- robot
- robotica
- zwerver
- Zei
- wetenschappelijk
- sensor
- kant
- signalen
- situatie
- helling
- Klein
- kleinere
- Software
- zonne-
- Zonnepanelen
- Zonne-energie
- Sony
- Zuiden
- Tussenruimte
- ruimteonderzoek
- ruimtevaartuig
- Land
- bepaald
- Staten
- Stations
- Stappen
- Met goed gevolg
- Zon
- zonlicht
- Oppervlak
- te overleven
- ingenomen
- doelwit
- team
- Technisch
- Technologie
- proef
- dat
- De
- De toekomst
- harte
- Er.
- Deze
- ze
- dit
- donderdag
- Dus
- niet de tijd of
- type
- naar
- nam
- in de richting van
- speelgoed-
- proces
- Gedraaid
- twee
- aan de gang
- eenheden
- universiteit-
- omhoog
- GMT
- voertuig
- was
- Wave
- waren
- wanneer
- welke
- en
- wil
- Met
- binnen
- werkzaam
- zephyrnet