29 년 2023 월 XNUMX 일 (나노 워크 뉴스) Researchers from the Department of Mechanical Science and Bioengineering at Osaka University have invented a new kind of walking robot that takes advantage of dynamic instability to navigate. By changing the flexibility of the couplings, the robot can be made to turn without the need for complex computational control systems. This work may assist the creation of rescue robots that are able to traverse uneven terrain.
Most animals on Earth have evolved a robust locomotion system using legs that provides them with a high degree of mobility over a wide range of environments. Somewhat disappointingly, engineers who have attempted to replicate this approach have often found that legged robots are surprisingly fragile. The breakdown of even one leg due to the repeated stress can severely limit the ability of these robots to function.
In addition, controlling a large number of joints so the robot can transverse complex environments requires a lot of computer power. Improvements in this design would be extremely useful for building autonomous or semi-autonomous robots that could act as exploration or rescue vehicles and enter dangerous areas.
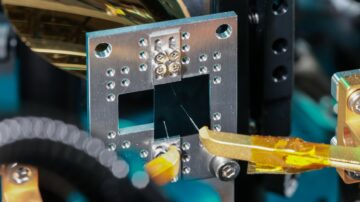
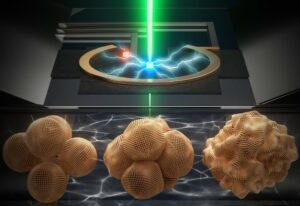
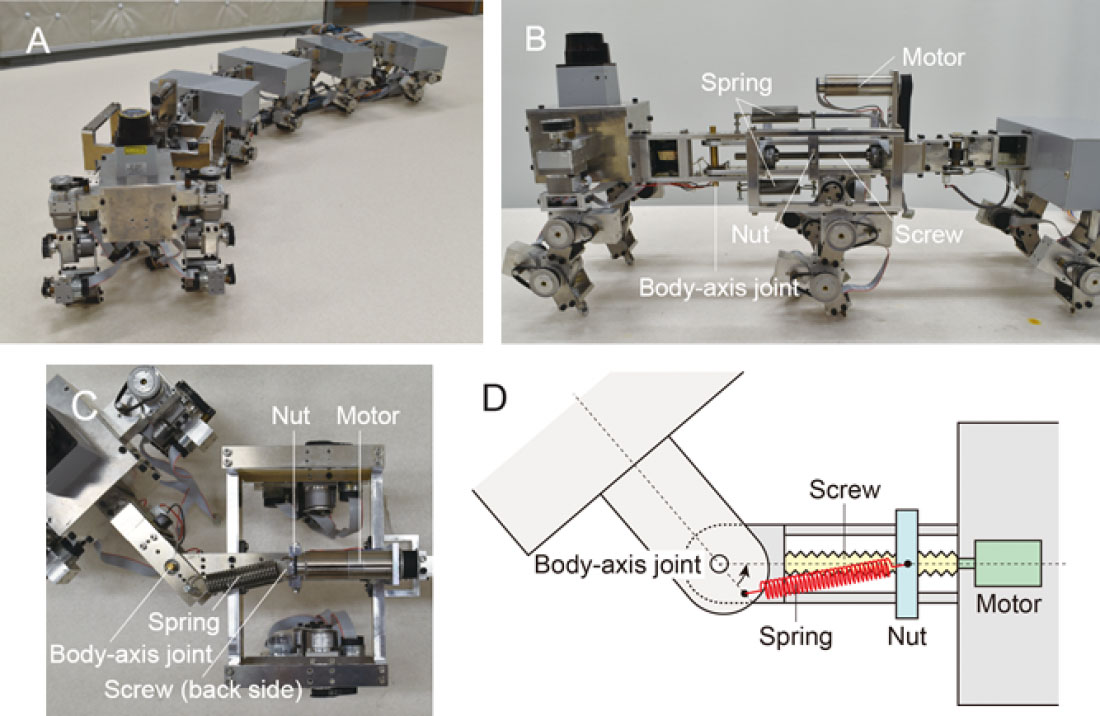 Myriapod robot (A) and Variable body-axis flexibility mechanism (B. Front view, C. Top view, D. Schematics of top view). (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
Now, investigators from Osaka University have developed a biomimetic “myriapod” robot that takes advantage of a natural instability that can convert straight walking into curved motion. In a study published recently in 소프트 로봇 (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), researchers from Osaka University describe their robot, which consists of six segments (with two legs connected to each segment) and flexible joints. Using an adjustable screw, the flexibility of the couplings can be modified with motors during the walking motion.
The researchers showed that increasing the flexibility of the joints led to a situation called a “pitchfork bifurcation,” in which straight walking becomes unstable. Instead, the robot transitions to walking in a curved pattern, either to the right or to the left. Normally, engineers would try to avoid creating instabilities. However, making controlled use of them can enable efficient maneuverability.
“We were inspired by the ability of certain extremely agile insects that allows them to control the dynamic instability in their own motion to induce quick movement changes,” says Shinya Aoi, an author of the study. Because this approach does not directly steer the movement of the body axis, but rather controls the flexibility, it can greatly reduce both the computational complexity as well as the energy requirements.
Myriapod robot (A) and Variable body-axis flexibility mechanism (B. Front view, C. Top view, D. Schematics of top view). (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
Now, investigators from Osaka University have developed a biomimetic “myriapod” robot that takes advantage of a natural instability that can convert straight walking into curved motion. In a study published recently in 소프트 로봇 (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), researchers from Osaka University describe their robot, which consists of six segments (with two legs connected to each segment) and flexible joints. Using an adjustable screw, the flexibility of the couplings can be modified with motors during the walking motion.
The researchers showed that increasing the flexibility of the joints led to a situation called a “pitchfork bifurcation,” in which straight walking becomes unstable. Instead, the robot transitions to walking in a curved pattern, either to the right or to the left. Normally, engineers would try to avoid creating instabilities. However, making controlled use of them can enable efficient maneuverability.
“We were inspired by the ability of certain extremely agile insects that allows them to control the dynamic instability in their own motion to induce quick movement changes,” says Shinya Aoi, an author of the study. Because this approach does not directly steer the movement of the body axis, but rather controls the flexibility, it can greatly reduce both the computational complexity as well as the energy requirements.
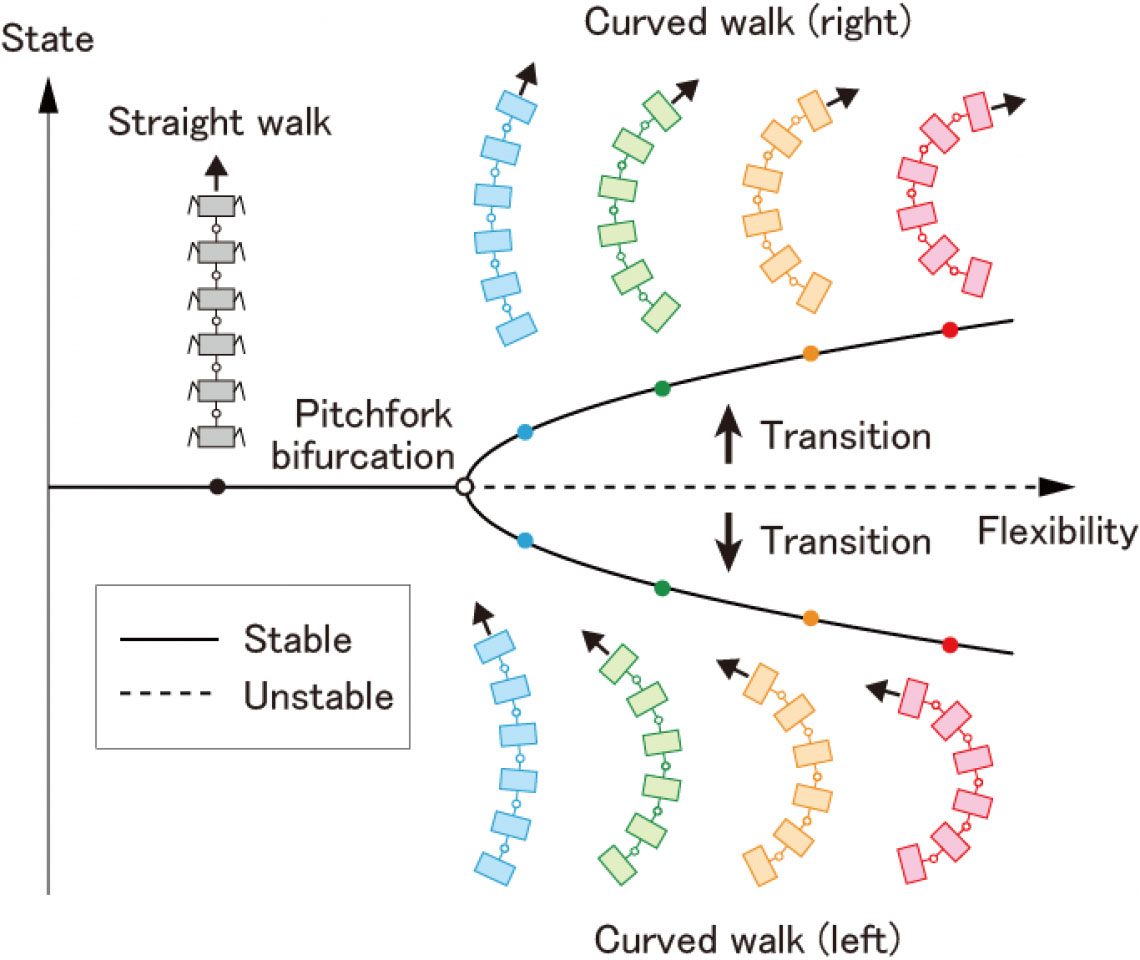 Stable and unstable walking patterns depending on the body-axis flexibility. (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
The team tested the robot’s ability to reach specific locations and found that it could navigate by taking curved paths toward targets. “We can foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments or exploration on other planets,” says Mau Adachi, another study author. Future versions may include additional segments and control mechanisms.
Stable and unstable walking patterns depending on the body-axis flexibility. (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
The team tested the robot’s ability to reach specific locations and found that it could navigate by taking curved paths toward targets. “We can foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments or exploration on other planets,” says Mau Adachi, another study author. Future versions may include additional segments and control mechanisms.
Myriapod robot (A) and Variable body-axis flexibility mechanism (B. Front view, C. Top view, D. Schematics of top view). (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
Now, investigators from Osaka University have developed a biomimetic “myriapod” robot that takes advantage of a natural instability that can convert straight walking into curved motion. In a study published recently in 소프트 로봇 (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), researchers from Osaka University describe their robot, which consists of six segments (with two legs connected to each segment) and flexible joints. Using an adjustable screw, the flexibility of the couplings can be modified with motors during the walking motion.
The researchers showed that increasing the flexibility of the joints led to a situation called a “pitchfork bifurcation,” in which straight walking becomes unstable. Instead, the robot transitions to walking in a curved pattern, either to the right or to the left. Normally, engineers would try to avoid creating instabilities. However, making controlled use of them can enable efficient maneuverability.
“We were inspired by the ability of certain extremely agile insects that allows them to control the dynamic instability in their own motion to induce quick movement changes,” says Shinya Aoi, an author of the study. Because this approach does not directly steer the movement of the body axis, but rather controls the flexibility, it can greatly reduce both the computational complexity as well as the energy requirements.
Stable and unstable walking patterns depending on the body-axis flexibility. (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
The team tested the robot’s ability to reach specific locations and found that it could navigate by taking curved paths toward targets. “We can foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments or exploration on other planets,” says Mau Adachi, another study author. Future versions may include additional segments and control mechanisms.
- SEO 기반 콘텐츠 및 PR 배포. 오늘 증폭하십시오.
- PlatoAiStream. Web3 데이터 인텔리전스. 지식 증폭. 여기에서 액세스하십시오.
- 미래 만들기 w Adryenn Ashley. 여기에서 액세스하십시오.
- PREIPO®로 PRE-IPO 회사의 주식을 사고 팔 수 있습니다. 여기에서 액세스하십시오.
- 출처: https://www.nanowerk.com/news2/robotics/newsid=63068.php
- :아니
- 10
- 2022
- 2023
- 7
- 8
- 9
- a
- 능력
- 할 수 있는
- 행동
- 또한
- 추가
- 조정
- 이점
- 기민한
- AL
- 수
- an
- 와
- 동물
- 다른
- 어플리케이션
- 접근
- 있군요
- 지역
- AS
- 지원
- At
- 시도하다
- 저자
- 자발적인
- 피하기
- 축
- BE
- 때문에
- 된다
- 몸
- 두
- 분석
- 건물
- 비자 면제 프로그램에 해당하는 국가의 시민권을 가지고 있지만
- by
- 라는
- CAN
- 센터
- 어떤
- 변경
- 변화
- 복잡한
- 복잡성
- 컴퓨터
- 컴퓨터 전원
- 연결
- 제어
- 통제
- 제어
- 컨트롤
- 변하게 하다
- 수
- 만들기
- 창조
- 위험한
- 날짜
- 도
- 학과
- 의존
- 설명
- 디자인
- 개발
- 직접
- 하지
- 두
- ...동안
- 동적
- E & T
- 마다
- 지구
- 효율적인
- 중
- 가능
- 에너지
- 엔지니어
- 엔터 버튼
- 환경
- 조차
- 진화
- 탐구
- 매우
- 유연성
- 융통성있는
- 럭셔리
- 발견
- 에
- 앞
- 기능
- 미래
- Go
- 매우
- 있다
- 높은
- 그러나
- HTTPS
- 영상
- 개량
- in
- 포함
- 증가
- 영감
- 불안정
- 를 받아야 하는 미국 여행자
- 으로
- 발명
- 수사
- IT
- JPG
- 종류
- 넓은
- 지도
- 왼쪽 (left)
- 다리
- 제한
- 위치
- 롯
- 만든
- 유튜브 영상을 만드는 것은
- XNUMX월..
- 기계적인
- 기구
- 메커니즘
- 중간
- 유동성
- 수정
- 가장
- 운동
- 모터
- 운동
- 자연의
- 이동
- 필요
- 신제품
- 일반적으로
- 지금
- 번호
- of
- 자주
- on
- ONE
- or
- 기타
- 위에
- 자신의
- 무늬
- 패턴
- 행성
- 플라톤
- 플라톤 데이터 인텔리전스
- 플라토데이터
- 힘
- 제공
- 출판
- 빠른
- 범위
- 차라리
- 도달
- 최근에
- 감소
- 반복
- 요구조건 니즈
- 필요
- 구출
- 연구원
- 연락해주세요
- 로봇
- 로봇
- 로봇
- 강력한
- 라고
- 시나리오
- 과학
- 검색
- 분절
- 세그먼트
- 심하게
- 보여
- 사태
- SIX
- So
- 부드러움
- 약간
- 구체적인
- 안정된
- 직진
- 스트레스
- 교육과정
- 이러한
- 체계
- 시스템은
- 소요
- 복용
- 목표
- 팀
- 그
- XNUMXD덴탈의
- 그들의
- 그들
- Bowman의
- 이
- 에
- 상단
- 방향
- 전환
- 시도
- 회전
- 두
- 대학
- 사용
- 사용
- 종류
- 차량
- 를 통해
- 관측
- 걷기
- 잘
- 했다
- 어느
- 누구
- 넓은
- 넓은 범위
- 과
- 없이
- 작업
- 일하는
- 겠지
- 제퍼 넷