03 년 2023 월 XNUMX 일 (나노 워크 뉴스) 2008년에 "소프트 로봇공학"이라는 용어가 채택된 이후 해당 분야의 엔지니어들은 탐사, 이동, 재활, 심지어 우주에서도 유용한 유연한 기계의 다양한 표현을 구축해 왔습니다. 영감의 원천 중 하나는 동물이 야생에서 움직이는 방식입니다. MIT 연구팀은 이를 한 단계 더 발전시켜 다음을 개발했습니다. 소프트주, 엔지니어가 소프트 로봇 공동 설계를 연구할 수 있는 생체 영감 플랫폼입니다. 프레임워크는 로봇의 모습을 결정하는 디자인으로 구성된 알고리즘을 최적화합니다. 제어 또는 로봇 동작을 가능하게 하는 시스템을 통해 사용자가 잠재적인 기계에 대한 윤곽선을 자동으로 생성하는 방법을 개선합니다.
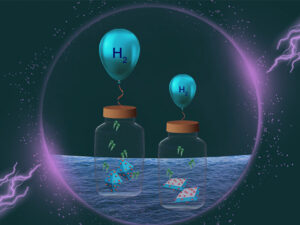
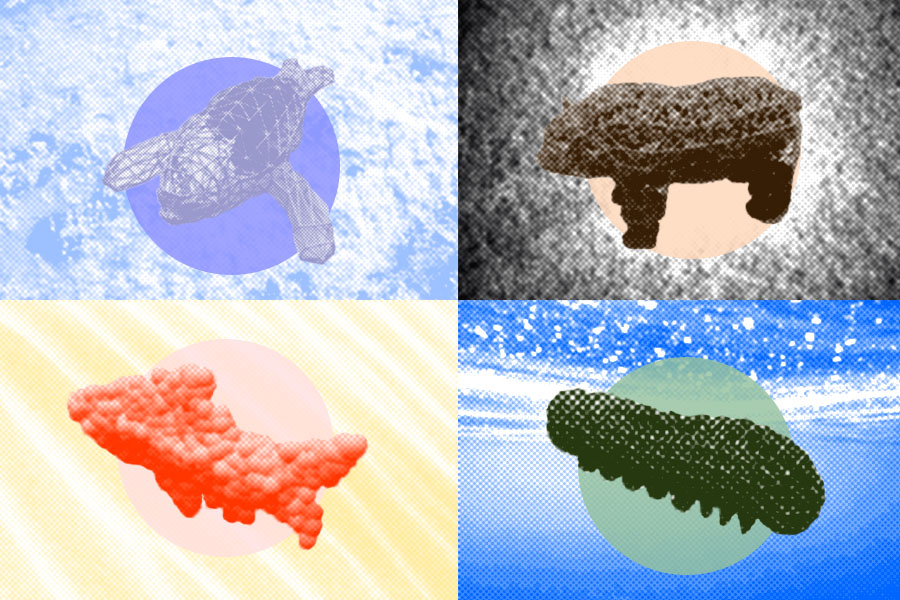 연구원들은 소프트 로봇 공동 설계를 위한 시스템을 개발했습니다. 이는 로봇 설계(로봇의 모양, 로봇 몸체에서 근육을 배치할 위치, 다양한 신체 부위에서 로봇이 얼마나 부드러운지)를 공동으로 검색하고 최적화하는 것을 의미합니다. 그리고 로봇 설계를 기반으로 목표 작업을 달성하기 위해 로봇을 제어하는 방법을 제시합니다. (이미지: Alex Shipps/MIT CSAIL 및 연구원) 야생을 산책하는 이 플랫폼은 이동과 같은 소프트 로봇 작업을 시뮬레이션할 수 있는 디자인으로 팬더 곰, 물고기, 상어, 애벌레와 같은 동물의 3D 모델을 제공합니다. , 민첩한 회전 및 다양한 환경에서의 경로 따르기. 눈, 사막, 점토 또는 물 등 플랫폼은 다양한 지형에서 다양한 디자인의 성능 균형을 보여줍니다.
"우리 프레임워크는 사용자가 로봇 모양에 가장 적합한 구성을 찾는 데 도움이 될 수 있으며, 이를 통해 다양한 작업을 수행할 수 있는 소프트 로봇 알고리즘을 설계할 수 있습니다."라고 컴퓨터 과학 및 인공 지능 연구소(Computer Science and Artificial Intelligence Laboratory)의 계열사인 MIT 박사과정 학생 Tsun-Hsuan Wang은 말합니다. CSAIL)이 프로젝트의 수석 연구원입니다. "본질적으로 이는 로봇이 환경과 상호 작용하는 최상의 전략을 이해하는 데 도움이 됩니다." SoftZoo는 다양한 생물 군계의 물리적 특징에 반응하는 움직임을 모델링하기 때문에 이미 설계 및 제어를 시뮬레이션하는 유사한 플랫폼보다 더 포괄적입니다. 프레임워크의 다양성은 미분 가능한 다중물리 엔진에서 비롯됩니다. 이를 통해 얼음 위에서 회전하는 아기 물개 또는 습지 환경을 가로지르는 애벌레와 같은 물리적 시스템의 여러 측면을 동시에 시뮬레이션할 수 있습니다. 엔진의 차별화 가능성은 계산 제어 및 설계 문제를 해결하는 데 필요한 비용이 많이 드는 시뮬레이션의 수를 줄여 공동 설계를 최적화합니다. 결과적으로 사용자는 보다 정교하고 지정된 알고리즘을 사용하여 소프트 로봇을 설계하고 이동할 수 있습니다.
다양한 지형과의 상호 작용을 시뮬레이션하는 시스템의 능력은 다양한 유기체의 모양, 크기 및 형태를 연구하는 생물학의 한 분야인 형태학의 중요성을 보여줍니다. 유사한 작업을 완료하는 기계의 청사진을 비교하는 것과 마찬가지로 환경에 따라 일부 생물학적 구조는 다른 구조보다 더 최적입니다.
이러한 생물학적 윤곽은 더욱 전문화되고 지형에 특화된 인공 생명체에 영감을 줄 수 있습니다. Wang은 “해파리의 부드럽게 물결치는 기하학적 구조 덕분에 넓은 수역을 효율적으로 이동할 수 있어 연구자들이 새로운 종류의 소프트 로봇을 개발하도록 영감을 주고 완전히 인실리코에서 배양된 인공 생물이 할 수 있는 무한한 가능성을 열어줍니다.”라고 말했습니다. “게다가 잠자리는 날 때 질량 중심을 바꾸는 날개의 특별한 구조를 갖고 있기 때문에 다른 비행 생물이 완료할 수 없는 매우 민첩한 기동을 수행할 수 있습니다. 우리 플랫폼은 잠자리가 주변 환경을 탐색하는 데 자연스럽게 더 능숙해지는 것과 같은 방식으로 운동을 최적화합니다.” 이전에는 로봇의 몸이 주변 환경과 순응하지 않았기 때문에 로봇은 복잡한 환경을 탐색하는 데 어려움을 겪었습니다. 그러나 SoftZoo를 사용하면 설계자는 로봇의 두뇌와 신체를 동시에 개발하여 육상 및 수중 기계를 모두 공동 최적화하여 보다 잘 인식하고 전문화할 수 있습니다. 행동 및 형태학적 지능이 향상되면 로봇은 구조 임무를 완료하고 탐사를 수행하는 데 더욱 유용해질 것입니다. 예를 들어 홍수로 인해 사람이 실종된 경우 로봇은 SotftZoo 플랫폼에서 시연된 방법을 사용하여 최적화되었기 때문에 잠재적으로 물을 더 효율적으로 횡단할 수 있습니다.
"SoftZoo는 소프트 로봇 설계자를 위한 오픈 소스 시뮬레이션을 제공하여 실제 로봇을 훨씬 더 쉽고 유연하게 구축하는 동시에 다양한 환경에서 기계의 운동 능력을 가속화합니다."라고 연구 공동 저자이자 MIT 연구 과학자인 Chuang Gan이 덧붙였습니다. -곧 매사추세츠 대학교 애머스트(Amherst)의 조교수가 될 IBM Watson AI Lab.
"소프트 로봇 본체와 두뇌(즉, 컨트롤러)를 공동 설계하는 이러한 컴퓨터 접근 방식은 특정 작업을 위해 설계된 맞춤형 기계를 신속하게 생성할 수 있는 문을 열어줍니다."라고 CSAIL의 이사인 Daniela Rus와 Andrew and 이 작품의 또 다른 저자인 MIT 전기 공학 및 컴퓨터 과학부(EECS)의 Erna Viterbi 교수입니다.
어떤 유형의 로봇을 제작하기 전에 프레임워크는 부자연스러운 장면을 현장 테스트하는 대신 사용할 수 있습니다. 예를 들어, 곰 같은 로봇이 사막에서 어떻게 행동하는지 평가하는 것은 보스턴의 도시 평야에서 일하는 연구팀에게는 어려울 수 있습니다. 대신 소프트 로봇 공학 엔지니어는 SoftZoo의 3D 모델을 사용하여 다양한 설계를 시뮬레이션하고 로봇을 제어하는 알고리즘이 탐색에 얼마나 효과적인지 평가할 수 있습니다. 결과적으로 이는 연구자의 시간과 자원을 절약할 수 있습니다.
그러나 현재 제조 기술의 한계는 이러한 소프트 로봇 설계를 현실화하는 데 방해가 됩니다. Wang은 “시뮬레이션에서 실제 로봇으로의 전환은 아직 해결되지 않았으며 추가 연구가 필요합니다.”라고 말합니다. "SoftZoo의 근육 모델, 공간적으로 변하는 강성 및 감각은 현재의 제조 기술로는 직접적으로 실현할 수 없으므로 우리는 이러한 과제를 해결하기 위해 노력하고 있습니다." 앞으로 플랫폼 설계자들은 로봇 제어를 테스트할 수 있는 능력을 고려하여 조작과 같은 인간 역학 분야의 응용 프로그램에 주목하고 있습니다. 이러한 잠재력을 입증하기 위해 Wang의 팀은 눈덩이를 앞으로 던지는 3D 팔을 설계했습니다.
연구원들은 소프트 로봇 공동 설계를 위한 시스템을 개발했습니다. 이는 로봇 설계(로봇의 모양, 로봇 몸체에서 근육을 배치할 위치, 다양한 신체 부위에서 로봇이 얼마나 부드러운지)를 공동으로 검색하고 최적화하는 것을 의미합니다. 그리고 로봇 설계를 기반으로 목표 작업을 달성하기 위해 로봇을 제어하는 방법을 제시합니다. (이미지: Alex Shipps/MIT CSAIL 및 연구원) 야생을 산책하는 이 플랫폼은 이동과 같은 소프트 로봇 작업을 시뮬레이션할 수 있는 디자인으로 팬더 곰, 물고기, 상어, 애벌레와 같은 동물의 3D 모델을 제공합니다. , 민첩한 회전 및 다양한 환경에서의 경로 따르기. 눈, 사막, 점토 또는 물 등 플랫폼은 다양한 지형에서 다양한 디자인의 성능 균형을 보여줍니다.
"우리 프레임워크는 사용자가 로봇 모양에 가장 적합한 구성을 찾는 데 도움이 될 수 있으며, 이를 통해 다양한 작업을 수행할 수 있는 소프트 로봇 알고리즘을 설계할 수 있습니다."라고 컴퓨터 과학 및 인공 지능 연구소(Computer Science and Artificial Intelligence Laboratory)의 계열사인 MIT 박사과정 학생 Tsun-Hsuan Wang은 말합니다. CSAIL)이 프로젝트의 수석 연구원입니다. "본질적으로 이는 로봇이 환경과 상호 작용하는 최상의 전략을 이해하는 데 도움이 됩니다." SoftZoo는 다양한 생물 군계의 물리적 특징에 반응하는 움직임을 모델링하기 때문에 이미 설계 및 제어를 시뮬레이션하는 유사한 플랫폼보다 더 포괄적입니다. 프레임워크의 다양성은 미분 가능한 다중물리 엔진에서 비롯됩니다. 이를 통해 얼음 위에서 회전하는 아기 물개 또는 습지 환경을 가로지르는 애벌레와 같은 물리적 시스템의 여러 측면을 동시에 시뮬레이션할 수 있습니다. 엔진의 차별화 가능성은 계산 제어 및 설계 문제를 해결하는 데 필요한 비용이 많이 드는 시뮬레이션의 수를 줄여 공동 설계를 최적화합니다. 결과적으로 사용자는 보다 정교하고 지정된 알고리즘을 사용하여 소프트 로봇을 설계하고 이동할 수 있습니다.
다양한 지형과의 상호 작용을 시뮬레이션하는 시스템의 능력은 다양한 유기체의 모양, 크기 및 형태를 연구하는 생물학의 한 분야인 형태학의 중요성을 보여줍니다. 유사한 작업을 완료하는 기계의 청사진을 비교하는 것과 마찬가지로 환경에 따라 일부 생물학적 구조는 다른 구조보다 더 최적입니다.
이러한 생물학적 윤곽은 더욱 전문화되고 지형에 특화된 인공 생명체에 영감을 줄 수 있습니다. Wang은 “해파리의 부드럽게 물결치는 기하학적 구조 덕분에 넓은 수역을 효율적으로 이동할 수 있어 연구자들이 새로운 종류의 소프트 로봇을 개발하도록 영감을 주고 완전히 인실리코에서 배양된 인공 생물이 할 수 있는 무한한 가능성을 열어줍니다.”라고 말했습니다. “게다가 잠자리는 날 때 질량 중심을 바꾸는 날개의 특별한 구조를 갖고 있기 때문에 다른 비행 생물이 완료할 수 없는 매우 민첩한 기동을 수행할 수 있습니다. 우리 플랫폼은 잠자리가 주변 환경을 탐색하는 데 자연스럽게 더 능숙해지는 것과 같은 방식으로 운동을 최적화합니다.” 이전에는 로봇의 몸이 주변 환경과 순응하지 않았기 때문에 로봇은 복잡한 환경을 탐색하는 데 어려움을 겪었습니다. 그러나 SoftZoo를 사용하면 설계자는 로봇의 두뇌와 신체를 동시에 개발하여 육상 및 수중 기계를 모두 공동 최적화하여 보다 잘 인식하고 전문화할 수 있습니다. 행동 및 형태학적 지능이 향상되면 로봇은 구조 임무를 완료하고 탐사를 수행하는 데 더욱 유용해질 것입니다. 예를 들어 홍수로 인해 사람이 실종된 경우 로봇은 SotftZoo 플랫폼에서 시연된 방법을 사용하여 최적화되었기 때문에 잠재적으로 물을 더 효율적으로 횡단할 수 있습니다.
"SoftZoo는 소프트 로봇 설계자를 위한 오픈 소스 시뮬레이션을 제공하여 실제 로봇을 훨씬 더 쉽고 유연하게 구축하는 동시에 다양한 환경에서 기계의 운동 능력을 가속화합니다."라고 연구 공동 저자이자 MIT 연구 과학자인 Chuang Gan이 덧붙였습니다. -곧 매사추세츠 대학교 애머스트(Amherst)의 조교수가 될 IBM Watson AI Lab.
"소프트 로봇 본체와 두뇌(즉, 컨트롤러)를 공동 설계하는 이러한 컴퓨터 접근 방식은 특정 작업을 위해 설계된 맞춤형 기계를 신속하게 생성할 수 있는 문을 열어줍니다."라고 CSAIL의 이사인 Daniela Rus와 Andrew and 이 작품의 또 다른 저자인 MIT 전기 공학 및 컴퓨터 과학부(EECS)의 Erna Viterbi 교수입니다.
어떤 유형의 로봇을 제작하기 전에 프레임워크는 부자연스러운 장면을 현장 테스트하는 대신 사용할 수 있습니다. 예를 들어, 곰 같은 로봇이 사막에서 어떻게 행동하는지 평가하는 것은 보스턴의 도시 평야에서 일하는 연구팀에게는 어려울 수 있습니다. 대신 소프트 로봇 공학 엔지니어는 SoftZoo의 3D 모델을 사용하여 다양한 설계를 시뮬레이션하고 로봇을 제어하는 알고리즘이 탐색에 얼마나 효과적인지 평가할 수 있습니다. 결과적으로 이는 연구자의 시간과 자원을 절약할 수 있습니다.
그러나 현재 제조 기술의 한계는 이러한 소프트 로봇 설계를 현실화하는 데 방해가 됩니다. Wang은 “시뮬레이션에서 실제 로봇으로의 전환은 아직 해결되지 않았으며 추가 연구가 필요합니다.”라고 말합니다. "SoftZoo의 근육 모델, 공간적으로 변하는 강성 및 감각은 현재의 제조 기술로는 직접적으로 실현할 수 없으므로 우리는 이러한 과제를 해결하기 위해 노력하고 있습니다." 앞으로 플랫폼 설계자들은 로봇 제어를 테스트할 수 있는 능력을 고려하여 조작과 같은 인간 역학 분야의 응용 프로그램에 주목하고 있습니다. 이러한 잠재력을 입증하기 위해 Wang의 팀은 눈덩이를 앞으로 던지는 3D 팔을 설계했습니다.
연구원들은 소프트 로봇 공동 설계를 위한 시스템을 개발했습니다. 이는 로봇 설계(로봇의 모양, 로봇 몸체에서 근육을 배치할 위치, 다양한 신체 부위에서 로봇이 얼마나 부드러운지)를 공동으로 검색하고 최적화하는 것을 의미합니다. 그리고 로봇 설계를 기반으로 목표 작업을 달성하기 위해 로봇을 제어하는 방법을 제시합니다. (이미지: Alex Shipps/MIT CSAIL 및 연구원) 야생을 산책하는 이 플랫폼은 이동과 같은 소프트 로봇 작업을 시뮬레이션할 수 있는 디자인으로 팬더 곰, 물고기, 상어, 애벌레와 같은 동물의 3D 모델을 제공합니다. , 민첩한 회전 및 다양한 환경에서의 경로 따르기. 눈, 사막, 점토 또는 물 등 플랫폼은 다양한 지형에서 다양한 디자인의 성능 균형을 보여줍니다.
"우리 프레임워크는 사용자가 로봇 모양에 가장 적합한 구성을 찾는 데 도움이 될 수 있으며, 이를 통해 다양한 작업을 수행할 수 있는 소프트 로봇 알고리즘을 설계할 수 있습니다."라고 컴퓨터 과학 및 인공 지능 연구소(Computer Science and Artificial Intelligence Laboratory)의 계열사인 MIT 박사과정 학생 Tsun-Hsuan Wang은 말합니다. CSAIL)이 프로젝트의 수석 연구원입니다. "본질적으로 이는 로봇이 환경과 상호 작용하는 최상의 전략을 이해하는 데 도움이 됩니다." SoftZoo는 다양한 생물 군계의 물리적 특징에 반응하는 움직임을 모델링하기 때문에 이미 설계 및 제어를 시뮬레이션하는 유사한 플랫폼보다 더 포괄적입니다. 프레임워크의 다양성은 미분 가능한 다중물리 엔진에서 비롯됩니다. 이를 통해 얼음 위에서 회전하는 아기 물개 또는 습지 환경을 가로지르는 애벌레와 같은 물리적 시스템의 여러 측면을 동시에 시뮬레이션할 수 있습니다. 엔진의 차별화 가능성은 계산 제어 및 설계 문제를 해결하는 데 필요한 비용이 많이 드는 시뮬레이션의 수를 줄여 공동 설계를 최적화합니다. 결과적으로 사용자는 보다 정교하고 지정된 알고리즘을 사용하여 소프트 로봇을 설계하고 이동할 수 있습니다.
다양한 지형과의 상호 작용을 시뮬레이션하는 시스템의 능력은 다양한 유기체의 모양, 크기 및 형태를 연구하는 생물학의 한 분야인 형태학의 중요성을 보여줍니다. 유사한 작업을 완료하는 기계의 청사진을 비교하는 것과 마찬가지로 환경에 따라 일부 생물학적 구조는 다른 구조보다 더 최적입니다.
이러한 생물학적 윤곽은 더욱 전문화되고 지형에 특화된 인공 생명체에 영감을 줄 수 있습니다. Wang은 “해파리의 부드럽게 물결치는 기하학적 구조 덕분에 넓은 수역을 효율적으로 이동할 수 있어 연구자들이 새로운 종류의 소프트 로봇을 개발하도록 영감을 주고 완전히 인실리코에서 배양된 인공 생물이 할 수 있는 무한한 가능성을 열어줍니다.”라고 말했습니다. “게다가 잠자리는 날 때 질량 중심을 바꾸는 날개의 특별한 구조를 갖고 있기 때문에 다른 비행 생물이 완료할 수 없는 매우 민첩한 기동을 수행할 수 있습니다. 우리 플랫폼은 잠자리가 주변 환경을 탐색하는 데 자연스럽게 더 능숙해지는 것과 같은 방식으로 운동을 최적화합니다.” 이전에는 로봇의 몸이 주변 환경과 순응하지 않았기 때문에 로봇은 복잡한 환경을 탐색하는 데 어려움을 겪었습니다. 그러나 SoftZoo를 사용하면 설계자는 로봇의 두뇌와 신체를 동시에 개발하여 육상 및 수중 기계를 모두 공동 최적화하여 보다 잘 인식하고 전문화할 수 있습니다. 행동 및 형태학적 지능이 향상되면 로봇은 구조 임무를 완료하고 탐사를 수행하는 데 더욱 유용해질 것입니다. 예를 들어 홍수로 인해 사람이 실종된 경우 로봇은 SotftZoo 플랫폼에서 시연된 방법을 사용하여 최적화되었기 때문에 잠재적으로 물을 더 효율적으로 횡단할 수 있습니다.
"SoftZoo는 소프트 로봇 설계자를 위한 오픈 소스 시뮬레이션을 제공하여 실제 로봇을 훨씬 더 쉽고 유연하게 구축하는 동시에 다양한 환경에서 기계의 운동 능력을 가속화합니다."라고 연구 공동 저자이자 MIT 연구 과학자인 Chuang Gan이 덧붙였습니다. -곧 매사추세츠 대학교 애머스트(Amherst)의 조교수가 될 IBM Watson AI Lab.
"소프트 로봇 본체와 두뇌(즉, 컨트롤러)를 공동 설계하는 이러한 컴퓨터 접근 방식은 특정 작업을 위해 설계된 맞춤형 기계를 신속하게 생성할 수 있는 문을 열어줍니다."라고 CSAIL의 이사인 Daniela Rus와 Andrew and 이 작품의 또 다른 저자인 MIT 전기 공학 및 컴퓨터 과학부(EECS)의 Erna Viterbi 교수입니다.
어떤 유형의 로봇을 제작하기 전에 프레임워크는 부자연스러운 장면을 현장 테스트하는 대신 사용할 수 있습니다. 예를 들어, 곰 같은 로봇이 사막에서 어떻게 행동하는지 평가하는 것은 보스턴의 도시 평야에서 일하는 연구팀에게는 어려울 수 있습니다. 대신 소프트 로봇 공학 엔지니어는 SoftZoo의 3D 모델을 사용하여 다양한 설계를 시뮬레이션하고 로봇을 제어하는 알고리즘이 탐색에 얼마나 효과적인지 평가할 수 있습니다. 결과적으로 이는 연구자의 시간과 자원을 절약할 수 있습니다.
그러나 현재 제조 기술의 한계는 이러한 소프트 로봇 설계를 현실화하는 데 방해가 됩니다. Wang은 “시뮬레이션에서 실제 로봇으로의 전환은 아직 해결되지 않았으며 추가 연구가 필요합니다.”라고 말합니다. "SoftZoo의 근육 모델, 공간적으로 변하는 강성 및 감각은 현재의 제조 기술로는 직접적으로 실현할 수 없으므로 우리는 이러한 과제를 해결하기 위해 노력하고 있습니다." 앞으로 플랫폼 설계자들은 로봇 제어를 테스트할 수 있는 능력을 고려하여 조작과 같은 인간 역학 분야의 응용 프로그램에 주목하고 있습니다. 이러한 잠재력을 입증하기 위해 Wang의 팀은 눈덩이를 앞으로 던지는 3D 팔을 설계했습니다.
- SEO 기반 콘텐츠 및 PR 배포. 오늘 증폭하십시오.
- PlatoAiStream. Web3 데이터 인텔리전스. 지식 증폭. 여기에서 액세스하십시오.
- 미래 만들기 w Adryenn Ashley. 여기에서 액세스하십시오.
- 출처: https://www.nanowerk.com/news2/robotics/newsid=62936.php
- :있다
- :이다
- :아니
- :어디
- $UP
- 10
- 11
- 12
- 8
- 9
- a
- 능력
- 가속하는
- 달성
- 가로질러
- 추가
- 채택
- 제휴
- 기민한
- AI
- 알렉스
- 알고리즘
- 허용
- 수
- 이미
- an
- 및
- 앤드류
- 동물
- 다른
- 어떤
- 어플리케이션
- 접근
- 있군요
- ARM
- 무기
- 인조의
- 인공 지능
- AS
- 측면
- 평가
- 조수
- At
- 저자
- 자동적으로
- 유아
- 기반으로
- BE
- 곰들
- 때문에
- 된
- 전에
- BEST
- 생물학
- 몸
- 보스턴
- 두
- 뇌
- 두뇌
- 지사
- 가져
- 빌드
- 건물
- by
- CAN
- 기능
- 수
- 센터
- 과제
- 도전
- 이전 단계로 돌아가기
- 공저자
- 제공
- 비교
- 완전한
- 완료
- 준수
- 포괄적 인
- 컴퓨터
- 컴퓨터 과학
- 전도
- 구성
- 제어
- 제어
- 수
- 만들기
- CSAIL
- Current
- 사용자 정의
- 날짜
- 보여
- 시연
- 보여줍니다
- 학과
- 의존
- 사막
- 디자인
- 설계
- 디자이너
- 디자인
- 결정하다
- 개발
- 개발
- 개발
- 다른
- 책임자
- 몇몇의
- do
- 문
- 잠자리
- 잠자리
- ...동안
- 용이하게
- 유효한
- 효율적으로
- 전기 공학
- 수
- 엔진
- 엔지니어링
- 엔지니어
- 전적으로
- 환경
- 환경
- 에센스
- 평가
- 조차
- 예
- 비싼
- 탐구
- 특징
- 들
- Find
- 융통성있는
- 홍수
- 나는
- 수행원
- 럭셔리
- 양식
- 앞으로
- 뼈대
- 에
- 추가
- 미래
- 생성
- 기하학
- 주어진
- 파악
- 있다
- 도움
- 도움이
- 도움이
- 방법
- HTTPS
- 사람의
- ICE
- if
- 설명하다
- 영상
- 중요성
- 개선
- in
- 포함
- 증가
- 영감
- inspire
- 고무
- 를 받아야 하는 미국 여행자
- 인텔리전스
- 상호 작용하는
- 상호 작용
- IT
- 그
- JPG
- 실험실
- 실험실
- 넓은
- 리드
- 생활
- 처럼
- 한계
- 보기
- 같이
- 기계
- 시장 조작
- .
- 질량
- 매사추세츠 주
- XNUMX월..
- 방법
- 역학
- 방법
- 중간
- 누락
- 선교
- MIT
- 모델
- 배우기
- 운동
- 움직임
- 운동
- 많은
- 이동
- 카테고리
- 신제품
- 번호
- 사물
- of
- 자주
- on
- ONE
- 오픈 소스
- 열기
- 열립니다
- 최적의
- 최적화
- 최적화
- 최적화
- or
- 기타
- 기타
- 우리의
- 요점
- 통로
- 수행
- 성능
- 사람
- 물리적
- 플랫폼
- 플랫폼
- 플라톤
- 플라톤 데이터 인텔리전스
- 플라토데이터
- 가능성
- 가능성
- 잠재적으로
- 이전에
- 문제
- 교수
- 프로젝트
- 제공
- 놓다
- 빠르게
- 반응
- 현실 세계
- 깨달은
- 감소
- 지역
- 복직
- 유적
- 필수
- 필요
- 구출
- 연구
- 연구원
- 연구원
- 제품 자료
- 결과
- 로봇
- 로봇
- 로봇
- 같은
- 찜하기
- 라고
- 장면
- 과학
- 과학자
- 수색
- 몇몇의
- 셰이프
- 모양
- 상어
- 측면
- 비슷한
- 시뮬레이션
- 동시에
- 이후
- 크기
- 눈
- So
- 부드러움
- 풀다
- 일부
- 예정입니다.
- 정교한
- 출처
- 스페이스 버튼
- 특별한
- 전문
- 구체적인
- 지정
- 스택
- 서다
- 단계
- 아직도
- 전략들
- 학생
- 연구
- 교육과정
- 이러한
- 체계
- 복용
- 목표
- 태스크
- 작업
- 팀
- 기법
- 지구의
- test
- 지원
- 보다
- 그
- XNUMXD덴탈의
- 미래
- 그들의
- 그들
- 그때
- Bowman의
- 그들
- 일
- 이
- 그래도?
- 을 통하여
- 던지기
- 시간
- 에
- 여행
- 회전
- 선회
- 유형
- 이해
- 대학
- 무제한
- 도시의
- us
- 사용
- 사용자
- 사용
- 여러
- 대단히
- 였다
- 물
- 워터스
- 왓슨
- 방법..
- we
- 했다
- 뭐
- 언제
- 여부
- 어느
- 동안
- 누구
- 야생
- 야생 생물
- 의지
- 과
- 작업
- 일하는
- 겠지
- 제퍼 넷