כאשר AI עוברת מהענן ל-Edge, אנו רואים את הטכנולוגיה בשימוש במגוון הולך ומתרחב של מקרי שימוש - החל מזיהוי חריגות ועד יישומים הכוללים קניות חכמות, מעקבים, רובוטיקה ואוטומציה של מפעלים. לפיכך, אין פתרון אחד שמתאים לכולם. אבל עם הצמיחה המהירה של מכשירים התומכים במצלמה, AI אומצה באופן נרחב ביותר לניתוח נתוני וידאו בזמן אמת כדי לבצע אוטומציה של ניטור וידאו כדי לשפר את הבטיחות, לשפר את היעילות התפעולית ולספק חוויות טובות יותר ללקוח, ובסופו של דבר להשיג יתרון תחרותי בתעשיות שלהם . כדי לתמוך טוב יותר בניתוח וידאו, עליך להבין את האסטרטגיות לאופטימיזציה של ביצועי המערכת בפריסות AI קצה.
- בחירת מנועי המחשוב בגודל הנכון כדי לעמוד ברמות הביצועים הנדרשות או לחרוג מהם. עבור יישום AI, מנועי המחשוב הללו חייבים לבצע את הפונקציות של צינור הראייה כולו (כלומר, עיבוד וידאו לפני ואחרי, הסקת רשתות עצביות).
ייתכן שיהיה צורך במאיץ AI ייעודי, בין אם הוא דיסקרטי או משולב ב-SoC (בניגוד להרצת הסקת הבינה המלאכותית על מעבד או GPU).
- הבנת ההבדל בין תפוקה לאחביון; לפיה תפוקה היא הקצב שניתן לעבד נתונים במערכת והשהייה מודדת את העיכוב בעיבוד הנתונים במערכת ולעתים קרובות קשורה להיענות בזמן אמת. לדוגמה, מערכת יכולה ליצור נתוני תמונה ב-100 פריימים לשנייה (תפוקה) אך נדרשות 100ms (שהייה) לתמונה לעבור במערכת.
- בהתחשב ביכולת להגדיל בקלות את ביצועי הבינה המלאכותית בעתיד כדי להתאים לצרכים הולכים וגדלים, דרישות משתנות וטכנולוגיות מתפתחות (למשל, מודלים מתקדמים יותר של בינה מלאכותית להגברת הפונקציונליות והדיוק). אתה יכול לבצע קנה מידה של ביצועים באמצעות מאיצי AI בפורמט מודול או עם שבבי מאיץ AI נוספים.
דרישות הביצוע בפועל תלויות ביישום. בדרך כלל, אפשר לצפות שלניתוח וידאו, המערכת חייבת לעבד זרמי נתונים המגיעים ממצלמות בקצב של 30-60 פריימים לשנייה וברזולוציה של 1080p או 4k. מצלמה התומכת בינה מלאכותית תעבד זרם יחיד; מכשיר קצה יעבד מספר זרמים במקביל. בכל מקרה, מערכת ה-Edge AI חייבת לתמוך בפונקציות העיבוד המקדים כדי להפוך את נתוני החיישן של המצלמה לפורמט התואם את דרישות הקלט של סעיף הסקת ה-AI (איור 1).
פונקציות עיבוד מוקדם קולטות את הנתונים הגולמיים ומבצעות משימות כגון שינוי גודל, נורמליזציה והמרת מרחב צבע, לפני הזנת הקלט למודל הפועל על מאיץ הבינה המלאכותית. עיבוד מוקדם יכול להשתמש בספריות עיבוד תמונה יעילות כמו OpenCV כדי להפחית את זמני העיבוד המקדים. עיבוד שלאחר כרוך בניתוח הפלט של ההסקה. הוא משתמש במשימות כגון דיכוי לא מקסימלי (NMS מפרש את הפלט של רוב המודלים לזיהוי אובייקטים) ותצוגת תמונה כדי ליצור תובנות ניתנות לפעולה, כגון תיבות תוחמות, תוויות מחלקות או ציוני ביטחון.

איור 1. עבור הסקת מודלים של AI, פונקציות הקדם והעיבוד שלאחר מבוצעות בדרך כלל על מעבד יישומים.
להסקת מודל AI יכול להיות אתגר נוסף של עיבוד מודלים מרובים של רשתות עצביות לכל מסגרת, בהתאם ליכולות האפליקציה. יישומי ראייה ממוחשבת כוללים בדרך כלל משימות AI מרובות הדורשות צינור של מספר דגמים. יתר על כן, פלט של דגם אחד הוא לעתים קרובות הקלט של הדגם הבא. במילים אחרות, מודלים ביישום תלויים זה בזה, ויש לבצע אותם ברצף. קבוצת הדגמים המדויקת לביצוע עשויה שלא להיות סטטית ועשויה להשתנות באופן דינמי, אפילו על בסיס מסגרת למסגרת.
האתגר של הפעלת מספר דגמים באופן דינמי דורש מאיץ AI חיצוני עם זיכרון ייעודי וגדול מספיק כדי לאחסן את הדגמים. לעתים קרובות מאיץ הבינה המלאכותית המשולבת בתוך SoC אינו מסוגל לנהל את עומס העבודה מרובה המודלים עקב אילוצים המוטלים על ידי תת-מערכת הזיכרון המשותף ומשאבים אחרים ב-SoC.
לדוגמה, מעקב אחר אובייקטים המבוסס על חיזוי תנועה מסתמך על גילויים מתמשכים כדי לקבוע וקטור המשמש לזיהוי האובייקט הנעקב במיקום עתידי. האפקטיביות של גישה זו מוגבלת מכיוון שאין לה יכולת זיהוי אמיתית. עם חיזוי תנועה, מסלול של אובייקט יכול ללכת לאיבוד עקב אי זיהויים, חסימות או שהאובייקט עוזב את שדה הראייה, אפילו לרגע. ברגע שאבד, אין דרך לשייך מחדש את המסלול של האובייקט. הוספת זיהוי מחדש פותרת מגבלה זו אך דורשת הטבעת מראה חזותי (כלומר, טביעת אצבע של תמונה). הטבעות מראה דורשות רשת שנייה כדי ליצור וקטור תכונה על ידי עיבוד התמונה הכלולה בתוך התיבה התוחמת של האובייקט שזוהה על ידי הרשת הראשונה. ניתן להשתמש בהטמעה זו כדי לזהות מחדש את האובייקט שוב, ללא קשר לזמן או למרחב. מכיוון שיש ליצור הטבעות עבור כל אובייקט שזוהה בשדה הראייה, דרישות העיבוד עולות ככל שהסצנה הופכת עמוסה יותר. מעקב אחר אובייקטים עם זיהוי מחדש דורש שיקול זהיר בין ביצוע זיהוי דיוק גבוה / רזולוציה גבוהה / קצב פריימים גבוה לבין שמירת תקורה מספקת עבור מדרגיות ההטמעות. אחת הדרכים לפתור את דרישת העיבוד היא להשתמש במאיץ AI ייעודי. כפי שהוזכר קודם לכן, מנוע ה-AI של ה-SoC יכול לסבול מהיעדר משאבי זיכרון משותפים. ניתן להשתמש באופטימיזציה של מודלים גם כדי להפחית את דרישת העיבוד, אבל זה יכול להשפיע על הביצועים ו/או הדיוק.
במצלמה חכמה או במכשיר קצה, ה-SoC המשולב (כלומר, המעבד המארח) רוכש את מסגרות הווידאו ומבצע את שלבי העיבוד המקדים שתיארנו קודם לכן. ניתן לבצע פונקציות אלו עם ליבות ה-CPU של ה-SoC או ה-GPU (אם קיים), אך ניתן לבצע אותן גם על ידי מאיצי חומרה ייעודיים ב-SoC (למשל, מעבד אותות תמונה). לאחר השלמת שלבי העיבוד המקדים הללו, מאיץ הבינה המלאכותית שמשולב ב-SoC יכול לגשת ישירות לקלט המקודם הזה מזיכרון המערכת, או במקרה של מאיץ בינה מלאכותית בדיד, הקלט מועבר להסקה, בדרך כלל דרך ממשק USB או PCIe.
SoC משולב יכול להכיל מגוון של יחידות חישוב, כולל CPUs, GPUs, מאיץ AI, מעבדי ראייה, מקודדים/מפענחים וידאו, מעבד אותות תמונה (ISP) ועוד. יחידות החישוב הללו חולקות כולן את אותו אפיק זיכרון וכתוצאה מכך גישה לאותו זיכרון. יתרה מזאת, ייתכן שהמעבד וה-GPU יצטרכו גם הם למלא תפקיד בהסקה ויחידות אלו יהיו עסוקות בהפעלת משימות אחרות במערכת פרוסה. לזה אנחנו מתכוונים בתקורה ברמת המערכת (איור 2).
מפתחים רבים מעריכים בטעות את הביצועים של מאיץ ה-AI המובנה ב-SoC מבלי לקחת בחשבון את ההשפעה של תקורה ברמת המערכת על הביצועים הכוללים. כדוגמה, שקול להפעיל מדד YOLO על מאיץ AI של 50 TOPS המשולב ב-SoC, שעשוי להשיג תוצאת מדד של 100 מסקנות לשנייה (IPS). אבל במערכת פרוסה עם כל יחידות החישוב האחרות שלה פעילות, 50 ה-TOPS הללו יכולים לצמצם למשהו כמו 12 TOPS והביצועים הכוללים יניבו רק 25 IPS, בהנחה של מקדם ניצול נדיב של 25%. תקורה של המערכת היא תמיד גורם אם הפלטפורמה מעבדת ברציפות זרמי וידאו. לחלופין, עם מאיץ בינה מלאכותית בדיד (למשל Kinara Ara-1, Hailo-8, Intel Myriad X), השימוש ברמת המערכת יכול להיות גדול מ-90% מכיוון שברגע שה-SoC המארח יוזם את פונקציית ההסקה ומעביר את הקלט של מודל הבינה המלאכותית נתונים, המאיץ פועל באופן אוטונומי תוך שימוש בזיכרון הייעודי שלו לגישה למשקלים ופרמטרים של הדגם.
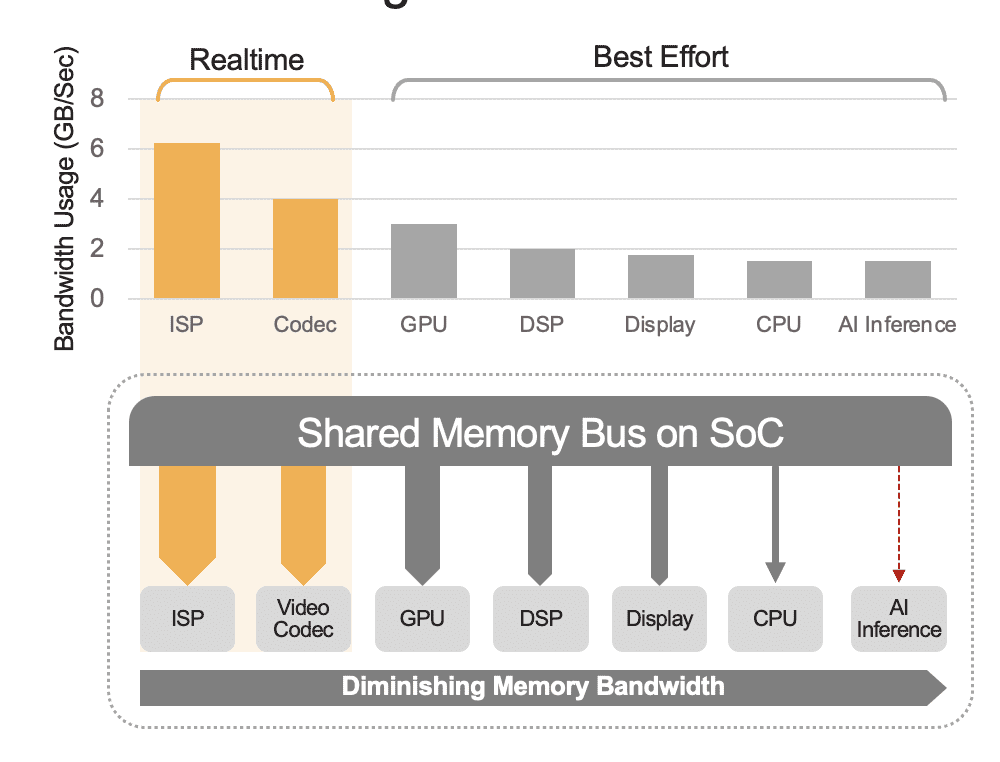
איור 2. אפיק הזיכרון המשותף ישלוט בביצועים ברמת המערכת, המוצגים כאן עם ערכים משוערים. הערכים האמיתיים ישתנו בהתאם למודל השימוש באפליקציה שלך ותצורת יחידת המחשוב של ה-SoC.
עד לנקודה זו, דנו בביצועי AI במונחים של פריימים לשנייה ו-TOPS. אבל זמן אחזור נמוך הוא דרישה חשובה נוספת כדי לספק תגובתיות בזמן אמת של המערכת. לדוגמה, במשחקים, זמן אחזור נמוך הוא קריטי לחוויית משחק חלקה ומגיבה, במיוחד במשחקים מבוקרי תנועה ומערכות מציאות מדומה (VR). במערכות נהיגה אוטונומית, זמן אחזור נמוך חיוני לזיהוי עצמים בזמן אמת, זיהוי הולכי רגל, זיהוי נתיבים וזיהוי תמרורים כדי למנוע פגיעה בבטיחות. מערכות נהיגה אוטונומיות דורשות בדרך כלל השהייה מקצה לקצה של פחות מ-150 אלפיות השנייה מהזיהוי ועד לפעולה בפועל. באופן דומה, בייצור, חביון נמוך חיוני לזיהוי פגמים בזמן אמת, זיהוי חריגות והכוונה רובוטית תלויים בניתוח וידאו עם השהייה נמוכה כדי להבטיח פעולה יעילה ולמזער את זמן ההשבתה בייצור.
באופן כללי, ישנם שלושה מרכיבים של חביון ביישום ניתוח וידאו (איור 3):
- זמן לכידת נתונים הוא הזמן מרגע שחיישן המצלמה לוכד פריים וידאו ועד לזמינות המסגרת למערכת הניתוח לעיבוד. אתה יכול לייעל את ההשהיה הזו על ידי בחירת מצלמה עם חיישן מהיר ומעבד השהיה נמוך, בחירת קצבי פריימים אופטימליים ושימוש בפורמטים יעילים של דחיסת וידאו.
- זמן העברת נתונים הוא הזמן שבו נתוני וידאו שנלכדו ודחוסים עוברים מהמצלמה אל מכשירי הקצה או השרתים המקומיים. זה כולל עיכובים בעיבוד רשת המתרחשים בכל נקודת קצה.
- חביון עיבוד נתונים מתייחס לזמן שבו מכשירי הקצה יבצעו משימות עיבוד וידאו כגון פירוק פריימים ואלגוריתמים אנליטיים (למשל, מעקב אחר אובייקטים מבוסס חיזוי תנועה, זיהוי פנים). כפי שצוין קודם לכן, זמן השהייה בעיבוד חשוב אפילו יותר עבור יישומים שחייבים להריץ דגמי AI מרובים עבור כל פריים וידאו.
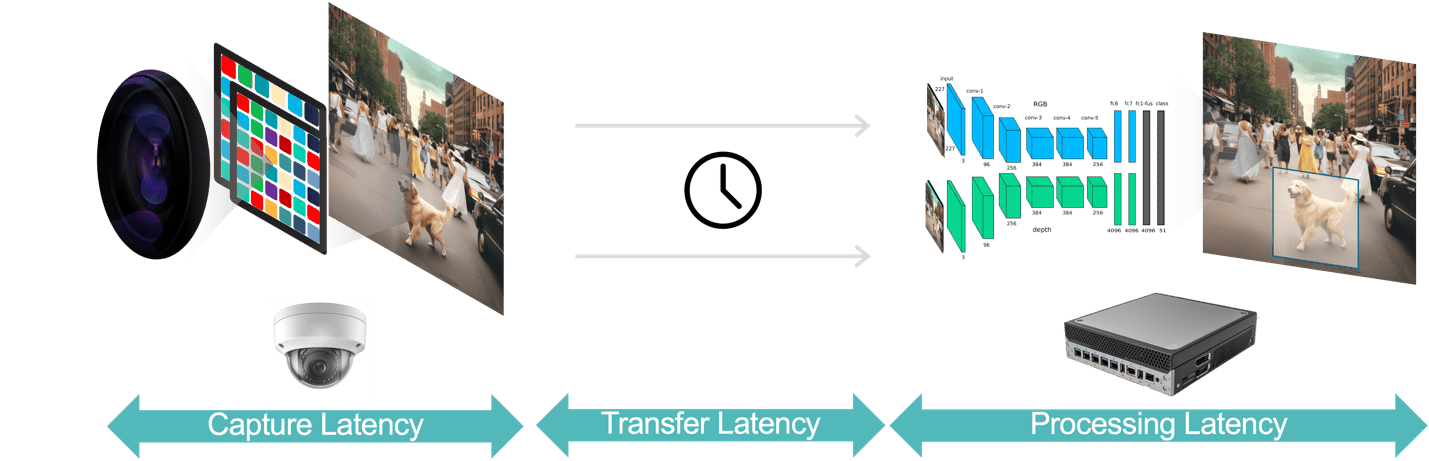
איור 3. צינור ניתוח הווידאו מורכב מלכידת נתונים, העברת נתונים ועיבוד נתונים.
ניתן לייעל את זמן עיבוד הנתונים באמצעות מאיץ בינה מלאכותית עם ארכיטקטורה שנועדה למזער את תנועת הנתונים על פני השבב ובין מחשוב לרמות שונות של היררכיית הזיכרון. כמו כן, כדי לשפר את ההשהיה והיעילות ברמת המערכת, הארכיטקטורה חייבת לתמוך בזמן מעבר בין דגמים באפס (או קרוב לאפס), כדי לתמוך טוב יותר ביישומי ריבוי הדגמים שדיברנו עליהם קודם לכן. גורם נוסף לשיפור הביצועים וההשהיה קשור לגמישות אלגוריתמית. במילים אחרות, ארכיטקטורות מסוימות מיועדות להתנהגות אופטימלית רק בדגמי AI ספציפיים, אך עם סביבת ה-AI המשתנה במהירות, מודלים חדשים לביצועים גבוהים יותר ודיוק טוב יותר מופיעים במה שנראה כמו בכל יום אחר. לכן, בחר מעבד AI קצה ללא הגבלות מעשיות על טופולוגיה, אופרטורים וגודל מודלים.
ישנם גורמים רבים שיש לקחת בחשבון במקסום הביצועים בהתקן AI קצה כולל דרישות ביצועים והשהייה ותקורה של המערכת. אסטרטגיה מוצלחת צריכה לשקול מאיץ AI חיצוני כדי להתגבר על מגבלות הזיכרון והביצועים במנוע ה-AI של ה-SoC.
צ.ח. צ'י הוא מנהל שיווק וניהול מוצר מיומן, לצ'י ניסיון רב בקידום מוצרים ופתרונות בתעשיית המוליכים למחצה, תוך התמקדות בבינה מלאכותית מבוססת חזון, קישוריות וממשקי וידאו עבור שווקים מרובים, כולל ארגונים וצרכנים. כיזם, Chee ייסד שני סטארט-אפים של וידאו מוליכים למחצה שנרכשו על ידי חברת מוליכים למחצה ציבורית. Chee הוביל צוותי שיווק מוצרים ונהנה לעבוד עם צוות קטן המתמקד בהשגת תוצאות מצוינות.
- הפצת תוכן ויחסי ציבור מופעל על ידי SEO. קבל הגברה היום.
- PlatoData.Network Vertical Generative Ai. העצים את עצמך. גישה כאן.
- PlatoAiStream. Web3 Intelligence. הידע מוגבר. גישה כאן.
- PlatoESG. פחמן, קלינטק, אנרגיה, סביבה, שמש, ניהול פסולת. גישה כאן.
- PlatoHealth. מודיעין ביוטכנולוגיה וניסויים קליניים. גישה כאן.
- מקור: https://www.kdnuggets.com/maximize-performance-in-edge-ai-applications?utm_source=rss&utm_medium=rss&utm_campaign=maximize-performance-in-edge-ai-applications
- :יש ל
- :הוא
- :לֹא
- 1
- 100
- 12
- 25
- 4k
- 50
- a
- יכולת
- מאיץ
- מאיצים
- גישה
- גישה
- להתאים
- להשיג
- דיוק
- השגתי
- נרכש
- רוכש
- לרוחב
- פעולה
- פעיל
- ממשי
- מוסיף
- נוסף
- מאומץ
- מתקדם
- לאחר
- שוב
- AI
- מנוע AI
- דגמי AI
- אלגוריתמי
- אלגוריתמים
- תעשיות
- גם
- תמיד
- an
- אנליזה
- ניתוח
- ניתוח
- ו
- גילוי חריגות
- אחר
- בקשה
- יישומים
- גישה
- ארכיטקטורה
- ARE
- AS
- המשויך
- At
- אוטומטי
- אוטומציה
- אוטונומי
- באופן אוטונומי
- זמינות
- זמין
- לְהִמָנַע
- מבוסס
- בסיס
- BE
- כי
- הופך להיות
- היה
- לפני
- להיות
- בנצ 'מרק
- מוטב
- בֵּין
- שניהם
- אריזה מקורית
- תיבות
- מובנה
- אוטובוס
- עסוק
- אבל
- by
- חדר
- מצלמות
- CAN
- יכולות
- יכולת
- ללכוד
- נתפס
- לכידה
- זהיר
- מקרה
- מקרים
- לאתגר
- משתנה
- שבב
- שבבי
- בחירה
- בכיתה
- ענן
- צֶבַע
- מגיע
- חברה
- תחרותי
- השלמת
- רכיבים
- מתפשר
- חישוב
- חישובית
- לחשב
- המחשב
- ראייה ממוחשבת
- יישומי ראייה ממוחשבת
- אמון
- תְצוּרָה
- קישוריות
- כתוצאה מכך
- לשקול
- התחשבות
- נחשב
- בהתחשב
- מורכב
- אילוצים
- צרכן
- להכיל
- הכלול
- רציף
- ברציפות
- המרה
- יכול
- CPU
- קריטי
- לקוח
- נתונים
- עיבוד נתונים
- יְוֹם
- מוקדש
- עיכוב
- עיכובים
- למסור
- נתן
- תלוי
- תלוי
- פרס
- פריסות
- מְתוּאָר
- מעוצב
- זוהה
- איתור
- לקבוע
- מפתחים
- התקנים
- הבדל
- ישירות
- נָדוֹן
- לְהַצִיג
- זמן השבתה
- נהיגה
- ראוי
- באופן דינמי
- e
- כל אחד
- מוקדם יותר
- בקלות
- אדג '
- השפעה
- יְעִילוּת
- יעילות
- יְעִילוּת
- יעיל
- או
- הטבעה
- סוף
- מקצה לקצה
- מנוע
- מנועים
- להגביר את
- לְהַבטִיחַ
- מִפְעָל
- שלם
- יזם
- סביבה
- חיוני
- מוערך
- להעריך
- אֲפִילוּ
- כל
- מתפתח
- דוגמה
- עולה על
- לבצע
- יצא לפועל
- מנהלים
- לצפות
- ניסיון
- חוויות
- נרחב
- ניסיון רב
- חיצוני
- פָּנִים
- זיהוי פנים
- גורם
- גורמים
- מפעל
- מהר
- מאפיין
- האכלה
- שדה
- תרשים
- טביעת אצבעות
- ראשון
- גמישות
- מתמקד
- התמקדות
- בעד
- פוּרמָט
- מסגרת
- החל מ-
- פונקציה
- פונקציונלי
- פונקציות
- יתר על כן
- עתיד
- זכייה
- משחקים
- המשחקים
- חוויית המשחק
- כללי
- ליצור
- נוצר
- נדיב
- Go
- GPU
- GPUs
- גדול
- יותר
- גדל
- צמיחה
- הדרכה
- חומרה
- יש
- ומכאן
- כאן
- היררכיה
- גָבוֹהַ
- גבוה יותר
- המארח
- HTTPS
- i
- לזהות
- if
- תמונה
- פְּגִיעָה
- חשוב
- מוּטָל
- לשפר
- משופר
- in
- באחר
- כולל
- כולל
- להגדיל
- גדל
- תעשיות
- תעשייה
- יוזם
- קלט
- בתוך
- תובנות
- משולב
- אינטל
- מִמְשָׁק
- ממשקים
- אל תוך
- לערב
- כרוך
- ללא קשר
- ספק שירותי אינטרנט
- IT
- שֶׁלָה
- KDnuggets
- תוויות
- חוסר
- נתיב
- גָדוֹל
- חֶבִיוֹן
- עזיבה
- הוביל
- פחות
- רמות
- ספריות
- כמו
- הגבלה
- מגבלות
- מוגבל
- לינקדין
- מקומי
- אבוד
- נמוך
- להוריד
- לנהל
- ניהול
- ייצור
- רב
- שיווק
- שוקי
- לְהַגדִיל
- מקסום
- מאי..
- אומר
- אמצעים
- לִפְגוֹשׁ
- זכרון
- מוּזְכָּר
- יכול
- החטיא
- מודל
- מודלים
- מודול
- ניטור
- יותר
- רוב
- תנועה
- תנועה
- מספר
- צריך
- מספר עצום
- ליד
- צרכי
- רשת
- עצביים
- רשת עצבית
- חדש
- הבא
- לא
- אובייקט
- זיהוי אובייקט
- להתרחש
- of
- לעתים קרובות
- on
- פעם
- ONE
- רק
- OpenCV
- מבצע
- מבצעי
- מפעילי
- מִתנַגֵד
- אופטימלי
- אופטימיזציה
- מטב
- אופטימיזציה
- מיטוב
- or
- אחר
- הַחוּצָה
- תפוקה
- יותר
- מקיף
- להתגבר על
- מקביל
- פרמטרים
- במיוחד
- עבור
- לבצע
- ביצועים
- ביצעתי
- ביצוע
- מבצע
- צינור
- פלטפורמה
- אפלטון
- מודיעין אפלטון
- אפלטון נתונים
- לְשַׂחֵק
- נקודה
- עמדה
- לאחר עיבוד
- מעשי
- נבואה
- תהליך
- מעובד
- תהליך
- מעבד
- מעבדים
- המוצר
- הפקה
- מוצרים
- קידום
- לספק
- ציבורי
- רכס
- טִוּוּחַ
- מהיר
- מהר
- ציון
- תעריפים
- חי
- נתונים גולמיים
- ממשי
- זמן אמת
- מציאות
- הכרה
- להפחית
- מתייחס
- לדרוש
- נדרש
- דרישה
- דרישות
- דורש
- החלטה
- משאבים
- תגובה
- הגבלות
- תוצאה
- תוצאות
- רובוטיקה
- תפקיד
- הפעלה
- ריצה
- פועל
- בְּטִיחוּת
- אותו
- בקרת מערכות ותקשורת
- סולם
- סולם ai
- דרוג
- סצינה
- ציונים
- בצורה חלקה
- שְׁנִיָה
- סעיף
- לִרְאוֹת
- נראה
- בחירה
- סמיקונדקטור
- סט
- שיתוף
- משותף
- קניות
- צריך
- הראה
- סִימָן
- לאותת
- באופן דומה
- since
- יחיד
- מידה
- קטן
- חכם
- פִּתָרוֹן
- פתרונות
- לפתור
- פותר
- כמה
- משהו
- מֶרחָב
- ספציפי
- חברות סטארט-אפ
- צעדים
- חנות
- אסטרטגיות
- אִסטרָטֶגִיָה
- זרם
- זרמים
- מוצלח
- כזה
- מספיק
- תמיכה
- הדחקה
- מעקב
- מערכת
- מערכות
- לקחת
- לוקח
- משימות
- נבחרת
- צוותי
- טכנולוגיות
- טכנולוגיה
- מונחים
- מֵאֲשֶׁר
- זֶה
- השמיים
- העתיד
- שֶׁלָהֶם
- אז
- שם.
- לכן
- אלה
- הֵם
- זֶה
- אלה
- שְׁלוֹשָׁה
- דרך
- תפוקה
- זמן
- פִּי
- ל
- עליוניות
- סה"כ
- לעקוב
- מעקב
- תְנוּעָה
- להעביר
- העברות
- לשנות
- נסיעות
- נָכוֹן
- שתיים
- בדרך כלל
- בסופו של דבר
- לא מסוגל
- להבין
- יחידה
- יחידות
- נוֹהָג
- USB
- להשתמש
- מְשׁוּמָשׁ
- שימושים
- באמצעות
- בְּדֶרֶך כְּלַל
- ניצול
- ערכים
- מגוון
- שונים
- וִידֵאוֹ
- לצפיה
- וירטואלי
- מציאות וירטואלית
- חזון
- חיוני
- vr
- דֶרֶך..
- we
- היו
- מה
- אם
- אשר
- באופן נרחב
- יצטרך
- עם
- לְלֹא
- מילים
- עובד
- היה
- X
- תְשׁוּאָה
- אתה חי רק פעם אחת
- אתה
- זפירנט
- אפס