29. május 2023. (Nanowerk News) Az Osakai Egyetem Mechanikai Tudományok és Biomérnöki Tanszékének kutatói újfajta sétálórobotot találtak ki, amely a dinamikus instabilitást használja ki a navigáláshoz. A tengelykapcsolók rugalmasságának változtatásával a robot forgásra késztethető anélkül, hogy bonyolult számítási vezérlőrendszerekre lenne szükség. Ez a munka segíthet olyan mentőrobotok létrehozásában, amelyek képesek áthaladni egyenetlen terepen. A legtöbb állat a Földön robusztus mozgásrendszert fejlesztett ki lábak segítségével, amely nagyfokú mobilitást biztosít számukra a környezet széles skálájában. Kissé kiábrándító módon azok a mérnökök, akik megpróbálták megismételni ezt a megközelítést, gyakran azt tapasztalták, hogy a lábú robotok meglepően törékenyek. Az ismétlődő igénybevétel miatt akár egy láb letörése is erősen korlátozhatja ezeknek a robotoknak a működését. Ezen túlmenően nagyszámú csukló vezérléséhez, hogy a robot át tudjon haladni bonyolult környezeteken, nagy számítógépes teljesítményre van szükség. Ennek a kialakításnak a továbbfejlesztése rendkívül hasznos lenne autonóm vagy félautonóm robotok építésekor, amelyek felderítő vagy mentőjárművekként működhetnek, és veszélyes területekre léphetnek be.
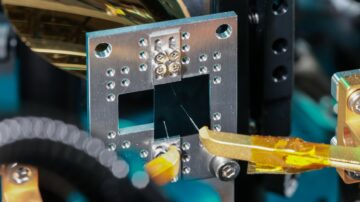
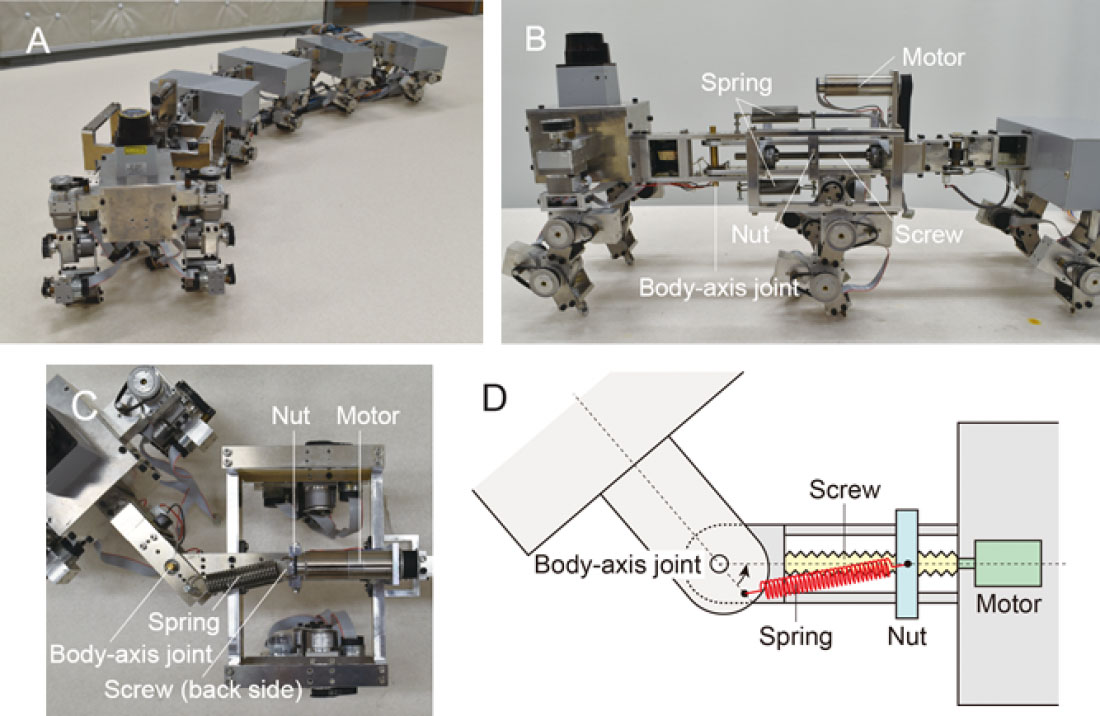 Myriapod robot (A) és változtatható test-tengely rugalmassági mechanizmus (B. Elölnézet, C. Felülnézet, D. Felülnézet vázlata). (Kép: CC BY-NC, 2023, Aoi et al., Soft Robotics) Az oszakai egyetem kutatói most kifejlesztettek egy biomimetikus „miriapod” robotot, amely kihasználja a természetes instabilitás előnyeit, és képes az egyenes gyaloglást ívelt mozgássá alakítani. Egy nemrégiben megjelent tanulmányban Puha robotika („Egy számtalan lábú robot manőverezhető és hatékony mozgása változó testtengely-rugalmassággal az instabilitáson és a bifurkáción keresztül”), az Osaka Egyetem kutatói leírják robotjukat, amely hat szegmensből (mindegyik szegmenshez két láb kapcsolódik) és rugalmas ízületekből áll. Állítható csavar segítségével a tengelykapcsolók rugalmassága motorokkal módosítható a járás közben. A kutatók kimutatták, hogy az ízületek rugalmasságának növelése „vasvilla bifurkációnak” nevezett helyzethez vezetett, amelyben az egyenes járás instabillá válik. Ehelyett a robot ívelt mintázatban sétál, jobbra vagy balra. Általában a mérnökök megpróbálják elkerülni az instabilitást. Ellenőrzött használatuk azonban hatékony manőverezést tesz lehetővé. „Bizonyos rendkívül mozgékony rovarok azon képessége inspirált bennünket, amely lehetővé teszi számukra, hogy saját mozgásukban szabályozzák a dinamikus instabilitást, hogy gyors mozgási változásokat idézzenek elő” – mondja Shinya Aoi, a tanulmány szerzője. Mivel ez a megközelítés nem közvetlenül a test tengelyének mozgását, hanem a rugalmasságot szabályozza, nagymértékben csökkentheti mind a számítási bonyolultságot, mind az energiaigényt.
Myriapod robot (A) és változtatható test-tengely rugalmassági mechanizmus (B. Elölnézet, C. Felülnézet, D. Felülnézet vázlata). (Kép: CC BY-NC, 2023, Aoi et al., Soft Robotics) Az oszakai egyetem kutatói most kifejlesztettek egy biomimetikus „miriapod” robotot, amely kihasználja a természetes instabilitás előnyeit, és képes az egyenes gyaloglást ívelt mozgássá alakítani. Egy nemrégiben megjelent tanulmányban Puha robotika („Egy számtalan lábú robot manőverezhető és hatékony mozgása változó testtengely-rugalmassággal az instabilitáson és a bifurkáción keresztül”), az Osaka Egyetem kutatói leírják robotjukat, amely hat szegmensből (mindegyik szegmenshez két láb kapcsolódik) és rugalmas ízületekből áll. Állítható csavar segítségével a tengelykapcsolók rugalmassága motorokkal módosítható a járás közben. A kutatók kimutatták, hogy az ízületek rugalmasságának növelése „vasvilla bifurkációnak” nevezett helyzethez vezetett, amelyben az egyenes járás instabillá válik. Ehelyett a robot ívelt mintázatban sétál, jobbra vagy balra. Általában a mérnökök megpróbálják elkerülni az instabilitást. Ellenőrzött használatuk azonban hatékony manőverezést tesz lehetővé. „Bizonyos rendkívül mozgékony rovarok azon képessége inspirált bennünket, amely lehetővé teszi számukra, hogy saját mozgásukban szabályozzák a dinamikus instabilitást, hogy gyors mozgási változásokat idézzenek elő” – mondja Shinya Aoi, a tanulmány szerzője. Mivel ez a megközelítés nem közvetlenül a test tengelyének mozgását, hanem a rugalmasságot szabályozza, nagymértékben csökkentheti mind a számítási bonyolultságot, mind az energiaigényt.
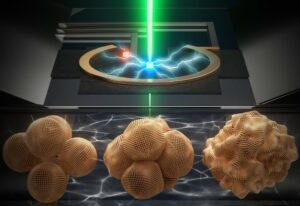
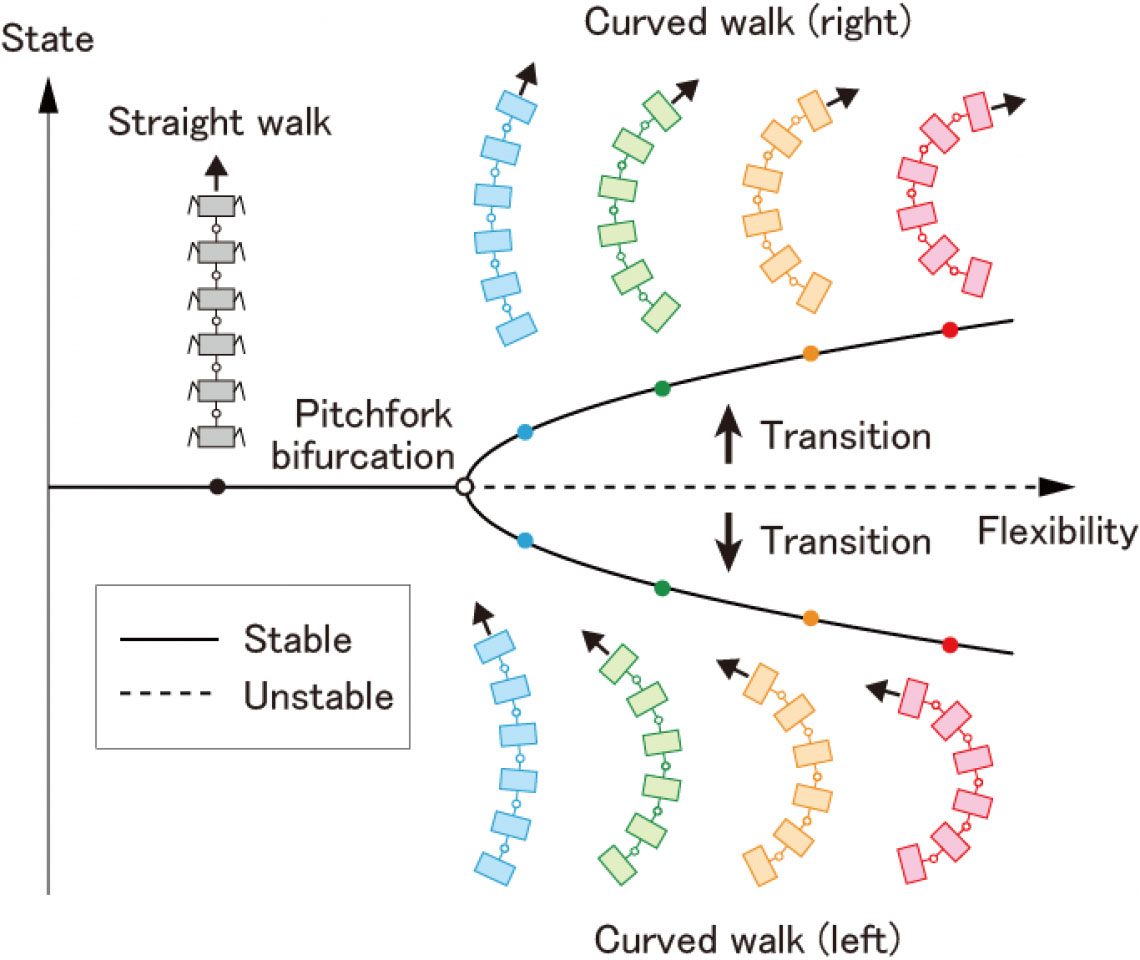 Stabil és instabil járásminták a test-tengely rugalmasságától függően. (Kép: CC BY-NC, 2023, Aoi et al., Soft Robotics) A csapat tesztelte a robot azon képességét, hogy képes-e elérni meghatározott helyeket, és megállapították, hogy képes navigálni a célpontok felé ívelt utakon. „Sokféle forgatókönyvet láthatunk előre, mint például a kutatás és mentés, a veszélyes környezetben végzett munka vagy a más bolygókon végzett kutatás” – mondja Mau Adachi, a tanulmány másik szerzője. A jövőbeli verziók további szegmenseket és vezérlőmechanizmusokat tartalmazhatnak.
Stabil és instabil járásminták a test-tengely rugalmasságától függően. (Kép: CC BY-NC, 2023, Aoi et al., Soft Robotics) A csapat tesztelte a robot azon képességét, hogy képes-e elérni meghatározott helyeket, és megállapították, hogy képes navigálni a célpontok felé ívelt utakon. „Sokféle forgatókönyvet láthatunk előre, mint például a kutatás és mentés, a veszélyes környezetben végzett munka vagy a más bolygókon végzett kutatás” – mondja Mau Adachi, a tanulmány másik szerzője. A jövőbeli verziók további szegmenseket és vezérlőmechanizmusokat tartalmazhatnak.
Myriapod robot (A) és változtatható test-tengely rugalmassági mechanizmus (B. Elölnézet, C. Felülnézet, D. Felülnézet vázlata). (Kép: CC BY-NC, 2023, Aoi et al., Soft Robotics) Az oszakai egyetem kutatói most kifejlesztettek egy biomimetikus „miriapod” robotot, amely kihasználja a természetes instabilitás előnyeit, és képes az egyenes gyaloglást ívelt mozgássá alakítani. Egy nemrégiben megjelent tanulmányban Puha robotika („Egy számtalan lábú robot manőverezhető és hatékony mozgása változó testtengely-rugalmassággal az instabilitáson és a bifurkáción keresztül”), az Osaka Egyetem kutatói leírják robotjukat, amely hat szegmensből (mindegyik szegmenshez két láb kapcsolódik) és rugalmas ízületekből áll. Állítható csavar segítségével a tengelykapcsolók rugalmassága motorokkal módosítható a járás közben. A kutatók kimutatták, hogy az ízületek rugalmasságának növelése „vasvilla bifurkációnak” nevezett helyzethez vezetett, amelyben az egyenes járás instabillá válik. Ehelyett a robot ívelt mintázatban sétál, jobbra vagy balra. Általában a mérnökök megpróbálják elkerülni az instabilitást. Ellenőrzött használatuk azonban hatékony manőverezést tesz lehetővé. „Bizonyos rendkívül mozgékony rovarok azon képessége inspirált bennünket, amely lehetővé teszi számukra, hogy saját mozgásukban szabályozzák a dinamikus instabilitást, hogy gyors mozgási változásokat idézzenek elő” – mondja Shinya Aoi, a tanulmány szerzője. Mivel ez a megközelítés nem közvetlenül a test tengelyének mozgását, hanem a rugalmasságot szabályozza, nagymértékben csökkentheti mind a számítási bonyolultságot, mind az energiaigényt.
Stabil és instabil járásminták a test-tengely rugalmasságától függően. (Kép: CC BY-NC, 2023, Aoi et al., Soft Robotics) A csapat tesztelte a robot azon képességét, hogy képes-e elérni meghatározott helyeket, és megállapították, hogy képes navigálni a célpontok felé ívelt utakon. „Sokféle forgatókönyvet láthatunk előre, mint például a kutatás és mentés, a veszélyes környezetben végzett munka vagy a más bolygókon végzett kutatás” – mondja Mau Adachi, a tanulmány másik szerzője. A jövőbeli verziók további szegmenseket és vezérlőmechanizmusokat tartalmazhatnak.
- SEO által támogatott tartalom és PR terjesztés. Erősödjön még ma.
- PlatoAiStream. Web3 adatintelligencia. Felerősített tudás. Hozzáférés itt.
- A jövő pénzverése – Adryenn Ashley. Hozzáférés itt.
- Részvények vásárlása és eladása PRE-IPO társaságokban a PREIPO® segítségével. Hozzáférés itt.
- Forrás: https://www.nanowerk.com/news2/robotics/newsid=63068.php
- :nem
- 10
- 2022
- 2023
- 7
- 8
- 9
- a
- képesség
- Képes
- törvény
- mellett
- További
- állítható
- Előny
- agilis
- AL
- lehetővé teszi, hogy
- an
- és a
- állatok
- Másik
- alkalmazások
- megközelítés
- VANNAK
- területek
- AS
- segít
- At
- megkísérelt
- szerző
- autonóm
- elkerülése érdekében
- Tengely
- BE
- mert
- válik
- test
- mindkét
- Bontás
- Épület
- de
- by
- hívott
- TUD
- Központ
- bizonyos
- Változások
- változó
- bonyolult
- bonyolultság
- számítógép
- számítógép teljesítmény
- összefüggő
- ellenőrzés
- vezérelt
- kontrolling
- ellenőrzések
- megtérít
- tudott
- létrehozása
- teremtés
- Veszélyes
- találka
- Fok
- osztály
- attól
- leírni
- Design
- fejlett
- közvetlenül
- nem
- két
- alatt
- dinamikus
- E&T
- minden
- föld
- hatékony
- bármelyik
- lehetővé
- energia
- Mérnökök
- belép
- környezetek
- Még
- alakult ki
- kutatás
- rendkívüli módon
- Rugalmasság
- rugalmas
- A
- talált
- ból ből
- front
- funkció
- jövő
- Go
- nagymértékben
- Legyen
- Magas
- azonban
- HTTPS
- kép
- fejlesztések
- in
- tartalmaz
- növekvő
- inspirálta
- instabilitás
- helyette
- bele
- Feltalált
- A nyomozók
- IT
- jpg
- Kedves
- nagy
- Led
- balra
- lábak
- LIMIT
- helyszínek
- Sok
- készült
- Gyártás
- Lehet..
- mechanikai
- mechanizmus
- mechanizmusok
- Középső
- mobilitás
- módosított
- a legtöbb
- mozgás
- Motors
- mozgalom
- Természetes
- Keresse
- Szükség
- Új
- rendszerint
- Most
- szám
- of
- gyakran
- on
- ONE
- or
- Más
- felett
- saját
- Mintás
- minták
- Bolygók
- Plató
- Platón adatintelligencia
- PlatoData
- hatalom
- biztosít
- közzétett
- Quick
- hatótávolság
- Inkább
- el
- nemrég
- csökkenteni
- megismételt
- követelmények
- megköveteli,
- mentés
- kutatók
- jobb
- robot
- robotika
- robotok
- erős
- azt mondja,
- forgatókönyvek
- Tudomány
- Keresés
- részes
- szegmensek
- szigorúan
- kimutatta,
- helyzet
- SIX
- So
- Puha
- némileg
- különleges
- stabil
- egyenes
- feszültség
- Tanulmány
- ilyen
- rendszer
- Systems
- tart
- bevétel
- célok
- csapat
- hogy
- A
- azok
- Őket
- Ezek
- ezt
- nak nek
- felső
- felé
- átmenetek
- megpróbál
- FORDULAT
- kettő
- egyetemi
- használ
- segítségével
- fajta
- Járművek
- keresztül
- Megnézem
- gyalogos
- JÓL
- voltak
- ami
- WHO
- széles
- Széleskörű
- val vel
- nélkül
- Munka
- dolgozó
- lenne
- zephyrnet
Még több Nanowerk


Olyan robotok origami alapú integrációja, amelyek érzékelik, döntenek és reagálnak
Forrás csomópont: 2565107
Időbélyeg: 4. április 2023.
Két-/kvázi-kétdimenziós perovszkit alapú heterostruktúrák: Felépítés, tulajdonságok és alkalmazások
Forrás csomópont: 1938788
Időbélyeg: 3. február 2023.

Nagy hatékonyságú vízhasítási folyamat derült ki
Forrás csomópont: 1949683
Időbélyeg: 10. február 2023.
A kutatók részletezik a szupravezető Kagome-fémek családjának soha nem látott tulajdonságait
Forrás csomópont: 1952937
Időbélyeg: 11. február 2023.
Az integrált fotonikus áramkörök segíthetnek bezárni a „terahertz-rést”
Forrás csomópont: 1899339
Időbélyeg: 14. január 2023.

A műtrágyák szén-dioxid-kibocsátása 80-re akár 2050%-kal is csökkenthető
Forrás csomópont: 1951214
Időbélyeg: 11. február 2023.
Új ferroelektromos eszközök a hatékonyabb mikroelektronikáért
Forrás csomópont: 2716345
Időbélyeg: 9. június 2023.
Hogyan alakítja át egy rekordméretű réz nanokatalizátor a CO2-t folyékony üzemanyagokká
Forrás csomópont: 1961058
Időbélyeg: 16. február 2023.
A kutatók funkcionális emberi agyszövetet nyomtatnak 3D-ben
Forrás csomópont: 3093799
Időbélyeg: 2. február 2024.
Technológiák fejlesztése a zöld hidrogén előállítás költségeinek csökkentésére
Forrás csomópont: 2700260
Időbélyeg: 2. június 2023.
Feltárja a pörgés titkait magas harmonikus szondákkal
Forrás csomópont: 2969974
Időbélyeg: 10. november 2023.