03. május 2023. (Nanowerk News) A „puha robotika” kifejezés 2008-as elfogadása óta a területen dolgozó mérnökök sokféle reprezentációt készítenek a feltárásban, a helyváltoztatásban, a rehabilitációban és még az űrben hasznosítható rugalmas gépekről. Az ihlet egyik forrása: az állatok mozgása a vadonban.
Az MIT kutatóiból álló csapat egy lépéssel tovább lépett, fejlődött SoftZoo, egy biológiai ihletésű platform, amely lehetővé teszi a mérnökök számára, hogy tanulmányozzák a puha robotok közös tervezését. A keretrendszer optimalizálja a tervezésből álló algoritmusokat, amelyek meghatározzák, hogyan fog kinézni a robot; és a vezérlés, vagy a rendszer, amely lehetővé teszi a robotizált mozgást, javítva azt, ahogyan a felhasználók automatikusan körvonalakat generálnak a potenciális gépekhez.
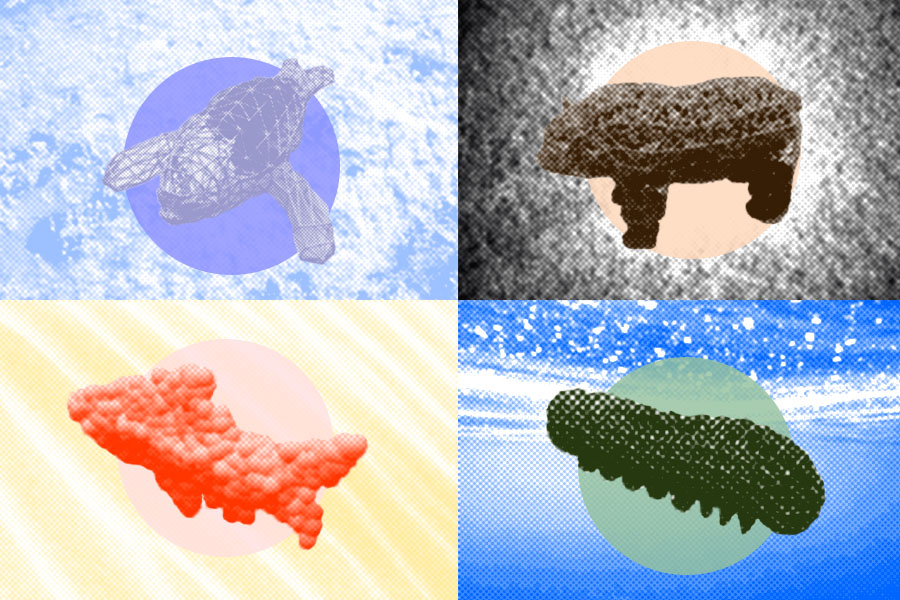 A kutatók kifejlesztettek egy rendszert a puha robot együtttervezéséhez, ami azt jelenti, hogy közösen keresik és optimalizálják a robottervezést – a robot formáját, hová helyezzen izomzatot a robot testében, mennyire puha a robot a különböző testrészeken; és a robot tervezése alapján az irányításának módja a célfeladat elérése érdekében. (Kép: Alex Shipps/MIT CSAIL és a kutatók)
A vad oldalon sétálva a platform 3D-s állatok, például panda medvék, halak, cápák és hernyók modelljeit kínálja, amelyek szimulálják a puha robotikai feladatokat, például a mozgást, az agilis fordulást és az útvonalkövetést különböző környezetekben. Legyen szó hóról, sivatagról, agyagról vagy vízről, a platform bemutatja a különféle kialakítások teljesítménybeli kompromisszumát a különböző terepen.
"Keretrendszerünk segíthet a felhasználóknak megtalálni a legjobb konfigurációt egy robot alakjához, lehetővé téve számukra olyan puha robotikai algoritmusok tervezését, amelyek sokféle dolgot képesek elvégezni" - mondja Tsun-Hsuan Wang, az MIT PhD hallgatója, a Számítástudományi és Mesterséges Intelligencia Laboratórium leányvállalata. CSAIL), aki a projekt vezető kutatója. "Lényegében segít megérteni a legjobb stratégiákat a robotok számára a környezetükkel való interakcióhoz."
A SoftZoo átfogóbb, mint a hasonló platformok, amelyek már a tervezést és az irányítást szimulálják, mivel olyan mozgást modellez, amely reagál a különböző biomák fizikai jellemzőire. A keret sokoldalúsága egy differenciálható multifizikus motornak köszönhető, amely lehetővé teszi egy fizikai rendszer több aspektusának egyidejű szimulációját, mint például a jégen forgó fókabébi vagy egy vizes élőhelyen átsuhanó hernyó. A motor differenciálhatósága optimalizálja a közös tervezést azáltal, hogy csökkenti a számítási vezérlési és tervezési problémák megoldásához szükséges gyakran költséges szimulációk számát. Ennek eredményeként a felhasználók lágy robotokat tervezhetnek és mozgathatnak kifinomultabb, meghatározott algoritmusokkal.
A rendszer azon képessége, hogy szimulálja a különböző terepekkel való kölcsönhatásokat, szemlélteti a morfológia fontosságát, a biológia azon ágát, amely a különböző organizmusok alakját, méretét és formáit vizsgálja. A környezettől függően egyes biológiai struktúrák optimálisabbak, mint mások, hasonlóan ahhoz, mint a hasonló feladatokat végző gépek tervrajzainak összehasonlítása.
Ezek a biológiai körvonalak speciálisabb, terepspecifikus mesterséges életet inspirálhatnak. "Egy medúza finoman hullámzó geometriája lehetővé teszi, hogy hatékonyan utazzon át nagy vízfelületeken, ami arra ösztönzi a kutatókat, hogy új puha robotfajtákat fejlesszenek ki, és korlátlan lehetőségeket nyit meg arra vonatkozóan, hogy a teljesen in silico mesterséges lények mire képesek" - mondja Wang. „Emellett a szitakötők nagyon agilis manővereket tudnak végrehajtani, amelyeket más repülő lények nem tudnak végrehajtani, mert különleges szerkezetek vannak a szárnyaikon, amelyek repülés közben megváltoztatják tömegközéppontjukat. Platformunk ugyanúgy optimalizálja a mozgást, ahogy a szitakötők természetesen ügyesebben dolgoznak a környezetén.”
A robotok korábban nehezen tudtak eligazodni a zsúfolt környezetben, mert testük nem volt összhangban a környezetükkel. A SoftZoo-val azonban a tervezők egyszerre fejleszthetik a robot agyát és testét, a szárazföldi és a vízi gépeket egyaránt optimalizálva, hogy tudatosabbak és speciálisabbak legyenek. A megnövekedett viselkedési és morfológiai intelligenciával a robotok hasznosabbak lennének a mentőakciók végrehajtásában és a feltárásban. Ha például egy személy eltűnt egy árvíz során, a robot potenciálisan hatékonyabban tud áthaladni a vizeken, mert a SotftZoo platformon bemutatott módszerekkel optimalizálták.
"A SoftZoo nyílt forráskódú szimulációt biztosít a puha robottervezők számára, segítve őket a valós világban való robotok könnyebb és rugalmasabb megépítésében, miközben felgyorsítja a gépek mozgási képességeit különböző környezetekben" - teszi hozzá Chuang Gan, a tanulmány társszerzője, az MIT kutatója. -IBM Watson AI Lab, aki hamarosan adjunktus lesz a Massachusettsi Egyetemen Amherstben.
„A puha robottestek és agyaik (vagyis a vezérlőik) közös tervezésének ez a számítási megközelítése megnyitja az ajtót olyan testreszabott gépek gyors létrehozása előtt, amelyeket egy adott feladatra terveztek” – teszi hozzá Daniela Rus, a CSAIL and the Andrew and the Andrew and the and the Andrew and Thermore igazgatója. Viterbi Erna az MIT Villamosmérnöki és Számítástechnikai Tanszékének (EECS) professzora, aki a munka másik szerzője.
Mielőtt bármilyen típusú robotot megépítenének, a keret helyettesítheti a természetellenes jelenetek helyszíni tesztelését. Például egy medveszerű robot viselkedésének felmérése a sivatagban kihívást jelenthet a Boston városi síkságain dolgozó kutatócsoport számára. Ehelyett a softrobotikus mérnökök a SoftZoo háromdimenziós modelljeit használhatják a különböző tervek szimulálására, és értékelhetik, hogy a robotjaikat irányító algoritmusok mennyire hatékonyak a navigációban. Ezzel viszont a kutatók időt és erőforrásokat takarítanak meg.
Ennek ellenére a jelenlegi gyártási technikák korlátai akadályozzák ezeknek a puha robotterveknek az életre keltését. "A szimulációról a fizikai robotra való átállás továbbra is megoldatlan, és további tanulmányozást igényel" - mondja Wang. "Az izommodellek, a térben változó merevség és a SoftZoo szenzorációja nem valósítható meg egyértelműen a jelenlegi gyártási technikákkal, ezért dolgozunk ezeken a kihívásokon."
A jövőben a platform tervezői az emberi mechanika alkalmazásaival, például a manipulációval foglalkoznak, tekintettel arra, hogy képes tesztelni a robotvezérlést. Ennek a lehetőségnek a demonstrálására Wang csapata egy 3D-s kart tervezett, amely egy hógolyót dobott előre.
A kutatók kifejlesztettek egy rendszert a puha robot együtttervezéséhez, ami azt jelenti, hogy közösen keresik és optimalizálják a robottervezést – a robot formáját, hová helyezzen izomzatot a robot testében, mennyire puha a robot a különböző testrészeken; és a robot tervezése alapján az irányításának módja a célfeladat elérése érdekében. (Kép: Alex Shipps/MIT CSAIL és a kutatók)
A vad oldalon sétálva a platform 3D-s állatok, például panda medvék, halak, cápák és hernyók modelljeit kínálja, amelyek szimulálják a puha robotikai feladatokat, például a mozgást, az agilis fordulást és az útvonalkövetést különböző környezetekben. Legyen szó hóról, sivatagról, agyagról vagy vízről, a platform bemutatja a különféle kialakítások teljesítménybeli kompromisszumát a különböző terepen.
"Keretrendszerünk segíthet a felhasználóknak megtalálni a legjobb konfigurációt egy robot alakjához, lehetővé téve számukra olyan puha robotikai algoritmusok tervezését, amelyek sokféle dolgot képesek elvégezni" - mondja Tsun-Hsuan Wang, az MIT PhD hallgatója, a Számítástudományi és Mesterséges Intelligencia Laboratórium leányvállalata. CSAIL), aki a projekt vezető kutatója. "Lényegében segít megérteni a legjobb stratégiákat a robotok számára a környezetükkel való interakcióhoz."
A SoftZoo átfogóbb, mint a hasonló platformok, amelyek már a tervezést és az irányítást szimulálják, mivel olyan mozgást modellez, amely reagál a különböző biomák fizikai jellemzőire. A keret sokoldalúsága egy differenciálható multifizikus motornak köszönhető, amely lehetővé teszi egy fizikai rendszer több aspektusának egyidejű szimulációját, mint például a jégen forgó fókabébi vagy egy vizes élőhelyen átsuhanó hernyó. A motor differenciálhatósága optimalizálja a közös tervezést azáltal, hogy csökkenti a számítási vezérlési és tervezési problémák megoldásához szükséges gyakran költséges szimulációk számát. Ennek eredményeként a felhasználók lágy robotokat tervezhetnek és mozgathatnak kifinomultabb, meghatározott algoritmusokkal.
A rendszer azon képessége, hogy szimulálja a különböző terepekkel való kölcsönhatásokat, szemlélteti a morfológia fontosságát, a biológia azon ágát, amely a különböző organizmusok alakját, méretét és formáit vizsgálja. A környezettől függően egyes biológiai struktúrák optimálisabbak, mint mások, hasonlóan ahhoz, mint a hasonló feladatokat végző gépek tervrajzainak összehasonlítása.
Ezek a biológiai körvonalak speciálisabb, terepspecifikus mesterséges életet inspirálhatnak. "Egy medúza finoman hullámzó geometriája lehetővé teszi, hogy hatékonyan utazzon át nagy vízfelületeken, ami arra ösztönzi a kutatókat, hogy új puha robotfajtákat fejlesszenek ki, és korlátlan lehetőségeket nyit meg arra vonatkozóan, hogy a teljesen in silico mesterséges lények mire képesek" - mondja Wang. „Emellett a szitakötők nagyon agilis manővereket tudnak végrehajtani, amelyeket más repülő lények nem tudnak végrehajtani, mert különleges szerkezetek vannak a szárnyaikon, amelyek repülés közben megváltoztatják tömegközéppontjukat. Platformunk ugyanúgy optimalizálja a mozgást, ahogy a szitakötők természetesen ügyesebben dolgoznak a környezetén.”
A robotok korábban nehezen tudtak eligazodni a zsúfolt környezetben, mert testük nem volt összhangban a környezetükkel. A SoftZoo-val azonban a tervezők egyszerre fejleszthetik a robot agyát és testét, a szárazföldi és a vízi gépeket egyaránt optimalizálva, hogy tudatosabbak és speciálisabbak legyenek. A megnövekedett viselkedési és morfológiai intelligenciával a robotok hasznosabbak lennének a mentőakciók végrehajtásában és a feltárásban. Ha például egy személy eltűnt egy árvíz során, a robot potenciálisan hatékonyabban tud áthaladni a vizeken, mert a SotftZoo platformon bemutatott módszerekkel optimalizálták.
"A SoftZoo nyílt forráskódú szimulációt biztosít a puha robottervezők számára, segítve őket a valós világban való robotok könnyebb és rugalmasabb megépítésében, miközben felgyorsítja a gépek mozgási képességeit különböző környezetekben" - teszi hozzá Chuang Gan, a tanulmány társszerzője, az MIT kutatója. -IBM Watson AI Lab, aki hamarosan adjunktus lesz a Massachusettsi Egyetemen Amherstben.
„A puha robottestek és agyaik (vagyis a vezérlőik) közös tervezésének ez a számítási megközelítése megnyitja az ajtót olyan testreszabott gépek gyors létrehozása előtt, amelyeket egy adott feladatra terveztek” – teszi hozzá Daniela Rus, a CSAIL and the Andrew and the Andrew and the and the Andrew and Thermore igazgatója. Viterbi Erna az MIT Villamosmérnöki és Számítástechnikai Tanszékének (EECS) professzora, aki a munka másik szerzője.
Mielőtt bármilyen típusú robotot megépítenének, a keret helyettesítheti a természetellenes jelenetek helyszíni tesztelését. Például egy medveszerű robot viselkedésének felmérése a sivatagban kihívást jelenthet a Boston városi síkságain dolgozó kutatócsoport számára. Ehelyett a softrobotikus mérnökök a SoftZoo háromdimenziós modelljeit használhatják a különböző tervek szimulálására, és értékelhetik, hogy a robotjaikat irányító algoritmusok mennyire hatékonyak a navigációban. Ezzel viszont a kutatók időt és erőforrásokat takarítanak meg.
Ennek ellenére a jelenlegi gyártási technikák korlátai akadályozzák ezeknek a puha robotterveknek az életre keltését. "A szimulációról a fizikai robotra való átállás továbbra is megoldatlan, és további tanulmányozást igényel" - mondja Wang. "Az izommodellek, a térben változó merevség és a SoftZoo szenzorációja nem valósítható meg egyértelműen a jelenlegi gyártási technikákkal, ezért dolgozunk ezeken a kihívásokon."
A jövőben a platform tervezői az emberi mechanika alkalmazásaival, például a manipulációval foglalkoznak, tekintettel arra, hogy képes tesztelni a robotvezérlést. Ennek a lehetőségnek a demonstrálására Wang csapata egy 3D-s kart tervezett, amely egy hógolyót dobott előre.
A kutatók kifejlesztettek egy rendszert a puha robot együtttervezéséhez, ami azt jelenti, hogy közösen keresik és optimalizálják a robottervezést – a robot formáját, hová helyezzen izomzatot a robot testében, mennyire puha a robot a különböző testrészeken; és a robot tervezése alapján az irányításának módja a célfeladat elérése érdekében. (Kép: Alex Shipps/MIT CSAIL és a kutatók)
A vad oldalon sétálva a platform 3D-s állatok, például panda medvék, halak, cápák és hernyók modelljeit kínálja, amelyek szimulálják a puha robotikai feladatokat, például a mozgást, az agilis fordulást és az útvonalkövetést különböző környezetekben. Legyen szó hóról, sivatagról, agyagról vagy vízről, a platform bemutatja a különféle kialakítások teljesítménybeli kompromisszumát a különböző terepen.
"Keretrendszerünk segíthet a felhasználóknak megtalálni a legjobb konfigurációt egy robot alakjához, lehetővé téve számukra olyan puha robotikai algoritmusok tervezését, amelyek sokféle dolgot képesek elvégezni" - mondja Tsun-Hsuan Wang, az MIT PhD hallgatója, a Számítástudományi és Mesterséges Intelligencia Laboratórium leányvállalata. CSAIL), aki a projekt vezető kutatója. "Lényegében segít megérteni a legjobb stratégiákat a robotok számára a környezetükkel való interakcióhoz."
A SoftZoo átfogóbb, mint a hasonló platformok, amelyek már a tervezést és az irányítást szimulálják, mivel olyan mozgást modellez, amely reagál a különböző biomák fizikai jellemzőire. A keret sokoldalúsága egy differenciálható multifizikus motornak köszönhető, amely lehetővé teszi egy fizikai rendszer több aspektusának egyidejű szimulációját, mint például a jégen forgó fókabébi vagy egy vizes élőhelyen átsuhanó hernyó. A motor differenciálhatósága optimalizálja a közös tervezést azáltal, hogy csökkenti a számítási vezérlési és tervezési problémák megoldásához szükséges gyakran költséges szimulációk számát. Ennek eredményeként a felhasználók lágy robotokat tervezhetnek és mozgathatnak kifinomultabb, meghatározott algoritmusokkal.
A rendszer azon képessége, hogy szimulálja a különböző terepekkel való kölcsönhatásokat, szemlélteti a morfológia fontosságát, a biológia azon ágát, amely a különböző organizmusok alakját, méretét és formáit vizsgálja. A környezettől függően egyes biológiai struktúrák optimálisabbak, mint mások, hasonlóan ahhoz, mint a hasonló feladatokat végző gépek tervrajzainak összehasonlítása.
Ezek a biológiai körvonalak speciálisabb, terepspecifikus mesterséges életet inspirálhatnak. "Egy medúza finoman hullámzó geometriája lehetővé teszi, hogy hatékonyan utazzon át nagy vízfelületeken, ami arra ösztönzi a kutatókat, hogy új puha robotfajtákat fejlesszenek ki, és korlátlan lehetőségeket nyit meg arra vonatkozóan, hogy a teljesen in silico mesterséges lények mire képesek" - mondja Wang. „Emellett a szitakötők nagyon agilis manővereket tudnak végrehajtani, amelyeket más repülő lények nem tudnak végrehajtani, mert különleges szerkezetek vannak a szárnyaikon, amelyek repülés közben megváltoztatják tömegközéppontjukat. Platformunk ugyanúgy optimalizálja a mozgást, ahogy a szitakötők természetesen ügyesebben dolgoznak a környezetén.”
A robotok korábban nehezen tudtak eligazodni a zsúfolt környezetben, mert testük nem volt összhangban a környezetükkel. A SoftZoo-val azonban a tervezők egyszerre fejleszthetik a robot agyát és testét, a szárazföldi és a vízi gépeket egyaránt optimalizálva, hogy tudatosabbak és speciálisabbak legyenek. A megnövekedett viselkedési és morfológiai intelligenciával a robotok hasznosabbak lennének a mentőakciók végrehajtásában és a feltárásban. Ha például egy személy eltűnt egy árvíz során, a robot potenciálisan hatékonyabban tud áthaladni a vizeken, mert a SotftZoo platformon bemutatott módszerekkel optimalizálták.
"A SoftZoo nyílt forráskódú szimulációt biztosít a puha robottervezők számára, segítve őket a valós világban való robotok könnyebb és rugalmasabb megépítésében, miközben felgyorsítja a gépek mozgási képességeit különböző környezetekben" - teszi hozzá Chuang Gan, a tanulmány társszerzője, az MIT kutatója. -IBM Watson AI Lab, aki hamarosan adjunktus lesz a Massachusettsi Egyetemen Amherstben.
„A puha robottestek és agyaik (vagyis a vezérlőik) közös tervezésének ez a számítási megközelítése megnyitja az ajtót olyan testreszabott gépek gyors létrehozása előtt, amelyeket egy adott feladatra terveztek” – teszi hozzá Daniela Rus, a CSAIL and the Andrew and the Andrew and the and the Andrew and Thermore igazgatója. Viterbi Erna az MIT Villamosmérnöki és Számítástechnikai Tanszékének (EECS) professzora, aki a munka másik szerzője.
Mielőtt bármilyen típusú robotot megépítenének, a keret helyettesítheti a természetellenes jelenetek helyszíni tesztelését. Például egy medveszerű robot viselkedésének felmérése a sivatagban kihívást jelenthet a Boston városi síkságain dolgozó kutatócsoport számára. Ehelyett a softrobotikus mérnökök a SoftZoo háromdimenziós modelljeit használhatják a különböző tervek szimulálására, és értékelhetik, hogy a robotjaikat irányító algoritmusok mennyire hatékonyak a navigációban. Ezzel viszont a kutatók időt és erőforrásokat takarítanak meg.
Ennek ellenére a jelenlegi gyártási technikák korlátai akadályozzák ezeknek a puha robotterveknek az életre keltését. "A szimulációról a fizikai robotra való átállás továbbra is megoldatlan, és további tanulmányozást igényel" - mondja Wang. "Az izommodellek, a térben változó merevség és a SoftZoo szenzorációja nem valósítható meg egyértelműen a jelenlegi gyártási technikákkal, ezért dolgozunk ezeken a kihívásokon."
A jövőben a platform tervezői az emberi mechanika alkalmazásaival, például a manipulációval foglalkoznak, tekintettel arra, hogy képes tesztelni a robotvezérlést. Ennek a lehetőségnek a demonstrálására Wang csapata egy 3D-s kart tervezett, amely egy hógolyót dobott előre.
- SEO által támogatott tartalom és PR terjesztés. Erősödjön még ma.
- PlatoAiStream. Web3 adatintelligencia. Felerősített tudás. Hozzáférés itt.
- A jövő pénzverése – Adryenn Ashley. Hozzáférés itt.
- Forrás: https://www.nanowerk.com/news2/robotics/newsid=62936.php
- :van
- :is
- :nem
- :ahol
- $ UP
- 10
- 11
- 12
- 8
- 9
- a
- képesség
- gyorsuló
- Elérése
- át
- Hozzáteszi
- fogadott
- Partner
- agilis
- AI
- alex
- algoritmusok
- lehetővé téve
- lehetővé teszi, hogy
- már
- an
- és a
- Andrew
- állatok
- Másik
- bármilyen
- alkalmazások
- megközelítés
- VANNAK
- ARM
- fegyver
- mesterséges
- mesterséges intelligencia
- AS
- szempontok
- értékelése
- Helyettes
- At
- szerző
- automatikusan
- Baba
- alapján
- BE
- Medvék
- mert
- óta
- előtt
- BEST
- biológia
- test
- Boston
- mindkét
- Agy
- agyvelő
- Ág
- Bringing
- épít
- Épület
- by
- TUD
- nem tud
- képességek
- képes
- Központ
- kihívások
- kihívást
- változik
- Társszerző
- jön
- összehasonlítva
- teljes
- kitöltésével
- engedékeny
- átfogó
- számítógép
- Computer Science
- vezető
- Configuration
- ellenőrzés
- kontrolling
- tudott
- létrehozása
- CSAIL
- Jelenlegi
- szabott
- találka
- bizonyítani
- igazolták
- mutatja
- osztály
- attól
- SIVATAG
- Design
- tervezett
- tervezők
- tervek
- meghatározza
- Fejleszt
- fejlett
- fejlesztése
- különböző
- Igazgató
- számos
- do
- Által
- szitakötők
- Szitakötő
- alatt
- könnyen
- Hatékony
- eredményesen
- villamosmérnök
- lehetővé teszi
- Motor
- Mérnöki
- Mérnökök
- teljesen
- Környezet
- környezetek
- lényeg
- értékelni
- Még
- példa
- drága
- kutatás
- Jellemzők
- mező
- Találjon
- rugalmas
- árvíz
- repülő
- következő
- A
- formák
- Előre
- Keretrendszer
- ból ből
- további
- jövő
- generál
- geometria
- adott
- fogás
- Legyen
- segít
- segít
- segít
- Hogyan
- HTTPS
- emberi
- ICE
- if
- illusztrálja
- kép
- fontosság
- javuló
- in
- Beleértve
- <p></p>
- Ihlet
- inspirál
- inspiráló
- helyette
- Intelligencia
- kölcsönhatásba
- kölcsönhatások
- IT
- ITS
- jpg
- labor
- laboratórium
- nagy
- vezet
- élet
- mint
- korlátozások
- néz
- hasonló
- gép
- Manipuláció
- sok
- Tömeg
- Massachusetts
- Lehet..
- eszközök
- mechanika
- mód
- Középső
- hiányzó
- küldetések
- MIT
- modellek
- több
- mozgás
- mozog
- mozgalom
- sok
- Keresse
- Navigáció
- Új
- szám
- objektumok
- of
- gyakran
- on
- ONE
- nyílt forráskódú
- nyitás
- nyit
- optimálisan
- optimalizált
- Optimalizálja
- optimalizálása
- or
- Más
- Egyéb
- mi
- körvonalak
- ösvény
- teljesít
- teljesítmény
- person
- fizikai
- emelvény
- Platformok
- Plató
- Platón adatintelligencia
- PlatoData
- lehetőségek
- potenciális
- potenciálisan
- korábban
- problémák
- Egyetemi tanár
- program
- biztosít
- tesz
- gyorsan
- reagál
- való Világ
- realizált
- csökkentő
- régiók
- rehabilitáció
- maradványok
- kötelező
- megköveteli,
- mentés
- kutatás
- kutató
- kutatók
- Tudástár
- eredményez
- robot
- robotika
- robotok
- azonos
- Megtakarítás
- azt mondja,
- jelenetek
- Tudomány
- Tudós
- keres
- számos
- Alak
- formák
- cápák
- oldal
- hasonló
- tettetés
- egyszerre
- óta
- méretek
- hó
- So
- Puha
- SOLVE
- néhány
- Nemsokára
- kifinomult
- forrás
- Hely
- speciális
- specializált
- különleges
- meghatározott
- verem
- állvány
- Lépés
- Még mindig
- stratégiák
- diák
- tanulmányok
- Tanulmány
- ilyen
- rendszer
- bevétel
- cél
- Feladat
- feladatok
- csapat
- technikák
- földi
- teszt
- Tesztelés
- mint
- hogy
- A
- A jövő
- azok
- Őket
- akkor
- Ezek
- ők
- dolgok
- ezt
- bár?
- Keresztül
- Dobás
- idő
- nak nek
- utazás
- FORDULAT
- Turning
- típus
- megért
- egyetemi
- korlátlan
- városi
- us
- használ
- Felhasználók
- segítségével
- különféle
- nagyon
- volt
- Víz
- Waters
- Watson
- Út..
- we
- voltak
- Mit
- amikor
- vajon
- ami
- míg
- WHO
- Vadon
- Vadvilág
- lesz
- val vel
- Munka
- dolgozó
- lenne
- zephyrnet
Még több Nanowerk

A tudósok új módszert fedeztek fel fém nanorészecskék előállítására katalizátorként való felhasználásra
Forrás csomópont: 3039388
Időbélyeg: 28. december 2023.

Az AI és a CRISPR pontosan szabályozzák a génexpressziót
Forrás csomópont: 2747420
Időbélyeg: 3. július 2023.
Megnövelt hatékonyságú szilícium eszközök tervezésének irányítása
Forrás csomópont: 2839986
Időbélyeg: 23. augusztus 2023.
A robotméhek és a gyökerek egészségesebb környezet és elegendő táplálék reményét kínálják
Forrás csomópont: 1977685
Időbélyeg: 25. február 2023.

Nano méretű szénanyagot lehetne használni a Down-szindróma kezelésére
Forrás csomópont: 2778869
Időbélyeg: 21. július 2023.
Egy neuromorf szinapszis, amelyet az OLED TV-k alapanyagaiból hoztak létre
Forrás csomópont: 2541090
Időbélyeg: 24. március 2023.

Fenntartható félvezetők felgyorsítása „többelemes tintával”
Forrás csomópont: 2911790
Időbélyeg: 28. szeptember 2023.
Hogyan lehet az elektronikus orrokat jobb illatúvá tenni
Forrás csomópont: 2573472
Időbélyeg: 8. április 2023.
Könnyű meghajtású nanokatalizátor hidrogén előállításához napfény felhasználásával
Forrás csomópont: 3053672
Időbélyeg: 10. január 2024.
A tudósok megfigyelik az átmenetet a kaotikus viselkedésre a nanométeres skálán
Forrás csomópont: 1982382
Időbélyeg: 27. február 2023.

A robotok és a mesterséges intelligencia összefognak, hogy felfedezzék a rendkívül szelektív katalizátorokat
Forrás csomópont: 1940293
Időbélyeg: 3. február 2023.