A Meta azon dolgozik, hogy a Quest headseteket mozgó járművekben is működőképessé tegye.
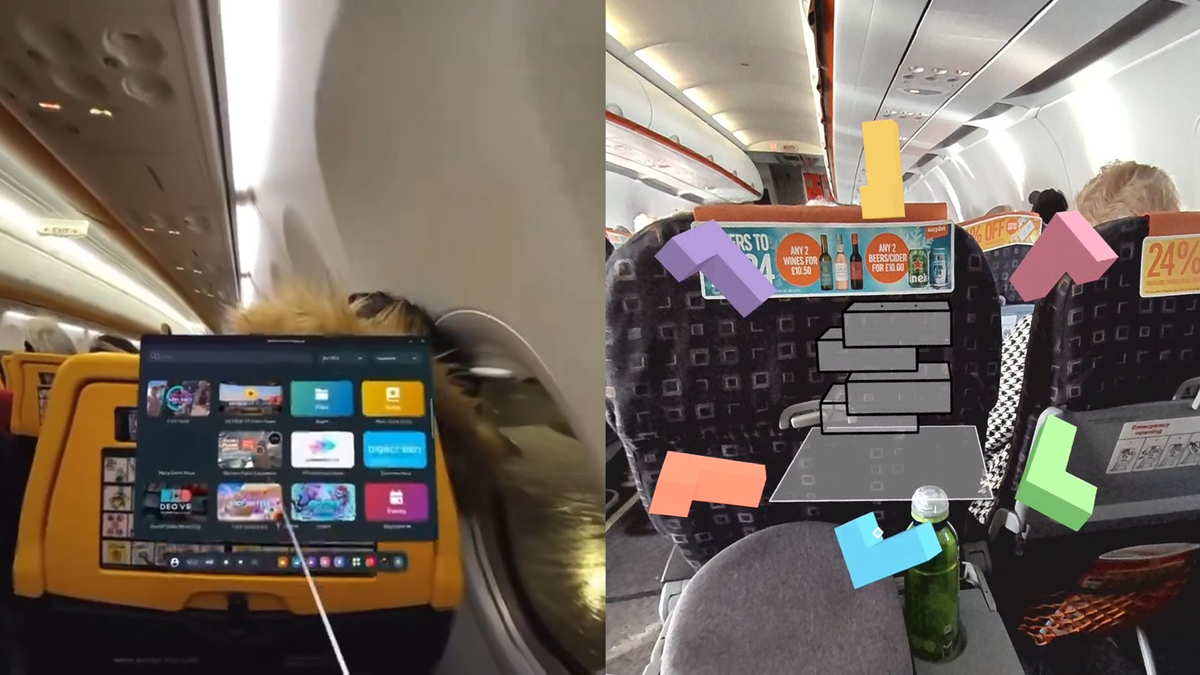
Andrew Fox UX-tervező újra közzétett egy videót X-ig Netsvietaiev Olekszandr Facebook-felhasználó próbál hogy a Quest 3-at passthrough módban használja egy repülőgépen, de nem tudja, mert az interfész eltávolodik.
A Meta műszaki igazgatója, Andrew Bosworth válaszolt a bejegyzéshez, hogy összefoglalja, miért történt, és azzal fejezte be, hogy Meta „dolgozik rajta”.
Nem, IMU-t használunk, hogy az objektumokat a fejhallgató mozgásához képest lokalizálva tartsuk, így a mozgó járművek kihívást jelentenek (ha bármilyen irányba gyorsulnak). Természetesen a kamerákat is használjuk, ezek együtt működnek, hiszen az IMU magasabb frekvenciájú, de kisebb pontosságú. Dolgozom rajta!
- Boz (@boztank) Január 24, 2024
Tehát miért történik valójában ez a sodródás a mozgó járművekben?
Az emberek gyakran azt gondolják, hogy a fejhallgatókon, a szemüvegeken és az önkövető vezérlőkön lévő marker nélküli, belülről kifelé nyomkövető rendszerek csak a kamerákat használják, de ez nem így van. Ezek a rendszerek éppúgy támaszkodnak az inerciamérő egységre (IMU), egy apró gyorsulásmérőt és giroszkópot tartalmazó chipre.
Míg a kamerák általában 30 Hz-en vagy 60 Hz-en működnek, az IMU általában 1000 Hz körüli frissítéseket biztosít, ami sokkal alacsonyabb késleltetést tesz lehetővé. Az IMU azonban valójában nem képes észlelni az abszolút mozgást – legalábbis nem közvetlenül. Az IMU-ban található gyorsulásmérő azonban érzékeli a gravitációhoz viszonyított gyorsulást, és a gyorsulás integrálját is figyelembe veheti a sebesség meghatározásához. És ha ezeknek a sebességértékeknek az integrálját veszi az idő múlásával, akkor elmozdulást kap az eredeti pozícióból.
Ezt a folyamatot halott számításnak nevezik. Pillanatról pillanatra minden headset és vezérlő így követi önmagát, és az optikai komponenseket, például a kamerákat vagy a lézerbázisállomásokat csak az IMU-adatok zajossága okozta halmozott hiba kijavítására használják. Egy mozgó járműben, például egy repülőgépen azonban a gyorsulásmérő felveszi magának a járműnek a gyorsulását, azt gondolva, hogy ez a fejhallgató gyorsulása, ami a Fox fenti videójában látható hirtelen és gyors pozíciósodródáshoz vezet.
Az Apple Vision Pro rendelkezik utazási móddal, de nem világos, hogy pontosan mit csinál.
Nem világos, hogy Bosworth pontosan mit ért azon, hogy Meta „dolgozik” a problémán.
Jelenleg lehetőség van a 6DoF pozíciókövetés letiltására a Questen, és a headset visszaáll a csak 3DoF forgáskövetésre, de ez az áthaladást is letiltja. Tehát a Meta talán azt tervezi, hogy engedélyezi az áthaladást, ha a pozíciókövetés le van tiltva.
Alternatív megoldásként a Meta azon munkálkodik, hogy a helyzetkövetést valamilyen módon működőképessé tegye mozgó járművekben, talán úgy, hogy utasítja a rendszert, hogy teljes mértékben a kamera látványára támaszkodjon, és figyelmen kívül hagyja az IMU-t. Tavaly Meta kutatási projektet mutatott be a Quest Pro működőképessé tétele egy mozgó BMW-ben, de ez magában foglalta az autó saját, fedélzeti IMU-jával való interfészt.
Eközben az Apple Vision Pro rendelkezik Travel Mode-val a repülőgépeken való használatra, és az Apple forgalmazta ezt a használati esetet, de egyelőre nem tudni, hogy pontosan mit csinál az Apple Travel Mode. Az Apple csak annyit mondott, hogy „stabilizálja a látványt”. Azt tervezem, hogy kipróbálom ezt a funkciót a hazautazásom során, miután New Yorkban felvettem a Vision Pro-t.
- SEO által támogatott tartalom és PR terjesztés. Erősödjön még ma.
- PlatoData.Network Vertical Generative Ai. Erősítse meg magát. Hozzáférés itt.
- PlatoAiStream. Web3 Intelligence. Felerősített tudás. Hozzáférés itt.
- PlatoESG. Carbon, CleanTech, Energia, Környezet, Nap, Hulladékgazdálkodás. Hozzáférés itt.
- PlatoHealth. Biotechnológiai és klinikai vizsgálatok intelligencia. Hozzáférés itt.
- Forrás: https://www.uploadvr.com/meta-working-on-quest-3-moving-vehicle-airplane-support/
- :van
- :is
- :nem
- $ UP
- 1
- 24
- 9
- a
- felett
- Abszolút
- gyorsul
- gyorsulás
- pontosság
- tulajdonképpen
- Után
- Repülőgép
- Repülők
- lehetővé
- Is
- an
- és a
- Andrew
- bármilyen
- Apple
- VANNAK
- körül
- AS
- At
- el
- vissza
- bázis
- BE
- mert
- hogy
- BMW
- de
- by
- hívott
- szoba
- kamerák
- TUD
- autó
- eset
- okozott
- kihívás
- csip
- COM
- összetevő
- tartalmaz
- ellenőr
- kijavítására
- tudott
- tanfolyam
- CTO
- Jelenleg
- dátum
- halott
- Tervező
- kimutatására
- irány
- közvetlenül
- Tiltva
- elmozdulás
- nem
- bármelyik
- lehetővé téve
- teljesen
- hiba
- Minden
- pontosan
- Esik
- Funkció
- A
- róka
- Frekvencia
- ból ből
- kap
- szemüveg
- gravitációs
- történik
- Esemény
- headset
- fülhallgatók
- <p></p>
- Kezdőlap
- Hogyan
- azonban
- HTTPS
- i
- if
- IMU
- in
- szerves
- Felület
- részt
- Hát
- IT
- maga
- utazás
- jpg
- éppen
- Tart
- lézer
- keresztnév
- Tavaly
- Késleltetés
- legkevésbé
- mint
- alacsonyabb
- csinál
- Gyártás
- eszközök
- mérés
- meta
- esetleg
- Mód
- pillanat
- mozgás
- mozgalom
- mozgó
- sok
- my
- Új
- New York
- objektumok
- of
- gyakran
- on
- Fedélzeti
- csak
- or
- eredeti
- felett
- saját
- átmegy
- talán
- vedd
- szedés
- terv
- Planes
- tervezés
- Plató
- Platón adatintelligencia
- PlatoData
- pozíció
- lehetséges
- állás
- per
- Probléma
- folyamat
- biztosít
- keresés
- küldetés 3
- quest pro
- gyors
- relatív
- támaszkodnak
- képvisel
- kutatás
- Eredmények
- futás
- s
- Mondott
- mondás
- lát
- So
- valahogy
- stabilizálni
- Állomások
- ilyen
- hirtelen
- összegez
- rendszer
- Systems
- T
- Vesz
- teszt
- hogy
- A
- akkor
- Ezek
- ők
- Szerintem
- Gondolkodás
- ezt
- azok
- bár?
- idő
- nak nek
- együtt
- Csomagkövetés
- pályák
- utazás
- jellemzően
- képtelen
- homályos
- egység
- ismeretlen
- Frissítés
- UploadVR
- használ
- használati eset
- használt
- használó
- Értékek
- jármű
- Járművek
- Sebesség
- videó
- látomás
- látvány
- volt
- we
- Mit
- amikor
- ami
- miért
- lesz
- val vel
- Munka
- együtt dolgozni
- dolgozó
- év
- york
- te
- A te
- zephyrnet









