A PGA TOUR továbbra is javítja a golf élményét valós idejű adatokkal, amelyek közelebb hozzák a rajongókat a játékhoz. A még gazdagabb élmények biztosítása érdekében egy új generációs labdahelyzet-követő rendszer kifejlesztésén dolgoznak, amely automatikusan követi a labda helyzetét a greenen.
A TOUR jelenleg a CDW által üzemeltetett ShotLink-et használja, egy elsőrangú pontozási rendszert, amely egy komplex kamerarendszert használ helyszíni számítással, hogy szorosan nyomon követhesse minden felvétel kezdő- és véghelyzetét. A TOUR a számítógépes látást és a gépi tanulási (ML) technikákat kívánta felfedezni, hogy egy következő generációs felhőalapú csővezetéket fejlesszen ki a golflabdák elhelyezésére a golfpályán.
Az Amazon Generative AI Innovation Center (GAIIC) egy közelmúltbeli PGA TOUR esemény példáján mutatta be e technikák hatékonyságát. A GAIIC egy moduláris csővezetéket tervezett, amely mély konvolúciós neurális hálózatok sorozatát lépcsőzi, amely sikeresen lokalizálja a játékosokat a kamera látóterében, meghatározza, melyik játékos helyezi el, és követi a labdát, ahogy az a csésze felé halad.
Ebben a bejegyzésben ismertetjük ennek a csővezetéknek a fejlesztését, a nyers adatokat, a csővezetéket alkotó konvolúciós neurális hálózatok tervezését és teljesítményének értékelését.
dátum
A TOUR 3 napos folyamatos videót biztosított egy közelmúltbeli versenyről három 4K kamerával, amelyek egy lyukon helyezkedtek el a green körül. A következő ábra egy kamera keretét ábrázolja, amely úgy van levágva és nagyítva, hogy a játékos elhelyezése jól látható legyen. Megjegyzendő, hogy a kamerák nagy felbontása ellenére a zöldtől való távolság miatt a labda kicsinek tűnik (általában 3×3, 4×4 vagy 5×5 pixeles), és az ilyen méretű célpontokat nehéz lehet pontosan lokalizálni.
![]()
A kamera feedjein kívül a TOUR a GAIIC-nek minden felvételen megjegyzésekkel ellátott pontozási adatokat adott, beleértve a nyugalmi helyzetének világbeli helyét és az időbélyeget. Ez lehetővé tette a greenen minden putt megjelenítését, valamint a játékosok dobásáról készült összes videoklip lekérését, amelyeket manuálisan fel lehetett címkézni és felhasználni a folyamatot alkotó észlelési modellek betanítására. A következő ábra a három kameranézetet mutatja hozzávetőleges puttolási útvonal fedvényekkel, az óramutató járásával ellentétes irányban a bal felső sarokban. A gombostűt minden nap áthelyezik, ahol az 1. nap a kéknek, a 2. nap a pirosnak, a 3. nap pedig a narancsnak felel meg.
Csővezeték áttekintése
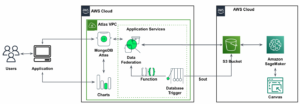
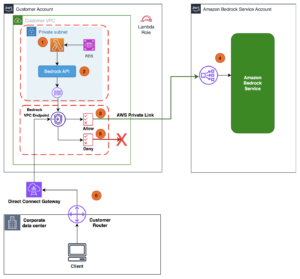
A teljes rendszer egy tanítási folyamatból és egy következtetési folyamatból áll. A következő diagram a képzési folyamat felépítését mutatja be. A kiindulópont a videó adatok bevitele, akár egy streaming modulból, például Amazon kinezis élő videóhoz vagy közvetlen elhelyezéshez Amazon egyszerű tárolási szolgáltatás (Amazon S3) történelmi videóhoz. A képzési folyamathoz videó előfeldolgozásra és a képek kézi címkézésére van szükség Amazon SageMaker Ground Truth. A modellekkel lehet oktatni Amazon SageMaker és az Amazon S3-mal tárolt műtermékeik.
![]()
A következő diagramon látható következtetési csővezeték számos modulból áll, amelyek egymás után információt nyernek ki a nyers videóból, és végül előrejelzik a nyugalmi labda világkoordinátáit. Kezdetben a zöldet levágják a nagyobb látómezőből minden kameráról, hogy lecsökkentsék azt a pixelterületet, amelyben a modelleknek játékosokat és labdákat kell keresniük. Ezután egy mély konvolúciós neurális hálózatot (CNN) használnak az emberek helyzetének meghatározására a látómezőben. Egy másik CNN-t arra használnak, hogy megjósolják, milyen típusú személyt találtak, annak megállapítására, hogy valaki puttolni készül-e. Miután egy valószínű puttert lokalizáltak a látómezőben, ugyanazt a hálózatot használják a labda helyzetének előrejelzésére a putter közelében. Egy harmadik CNN követi a labdát a mozgása közben, végül pedig egy transzformációs funkciót alkalmaz a kamera pixel pozíciójából a GPS koordinátákba.
![]()
Játékos észlelés
Bár lehetséges lenne egy CNN-t futtatni a labda észlelésére egy teljes 4K-s képkockán meghatározott időközönként, tekintettel a labda szögméretére ezeknél a kameratávolságoknál, minden kis fehér tárgy észlelést vált ki, ami sok téves riasztást eredményez. Annak elkerülése érdekében, hogy a teljes képkeretben keressük a labdát, kihasználhatjuk a játékos póza és a labda elhelyezkedése közötti összefüggéseket. A lerakni készülő labdának a játékos mellett kell lennie, így a játékosok látómezőben való megtalálása nagymértékben korlátozza azt a pixelterületet, amelyben a detektornak meg kell keresnie a labdát.
Sikerült egy olyan CNN-t használni, amelyet előre kiképeztek a jelenetben szereplő összes ember körüli határolódobozok előrejelzésére, amint az a következő ábrán látható. Sajnos gyakran egynél több labda van a greenen, így további logikára van szükség az összes ember megtalálásán és a labda keresésén túl. Ehhez egy másik CNN-re van szükség, hogy megtalálja azt a játékost, aki éppen rakott.
![]()
Játékosok besorolása és labdaérzékelés
Annak érdekében, hogy tovább szűkítsük, hol lehet a labda, finomhangoltunk egy előre betanított objektumészlelési CNN-t (YOLO v7), hogy besoroljuk az összes embert a greenen. Ennek a folyamatnak egy fontos összetevője volt egy képkészlet manuális címkézése a SageMaker Ground Truth segítségével. A címkék lehetővé tették a CNN számára, hogy nagy pontossággal minősítse a játékos dobásokat. A címkézési folyamat során a labda is körvonalazódott a játékos dobásával együtt, így ez a CNN képes volt labdaérzékelést is végrehajtani, egy kezdeti határolókeretet rajzolva a labda köré putt előtt, és a pozícióinformációkat betáplálta a CNN utáni labdakövetőbe. .
Négy különböző címkét használunk a képeken szereplő objektumok megjegyzésére:
- játékos-elhelyezés – Az a játékos, aki ütőt tart és helyező pozícióban van
- játékos-nem-elhelyezés – Az a játékos, aki nincs helyezési pozícióban (lehet, hogy ütőt is tart)
- más személy – Bármely más személy, aki nem játékos
- Golf labda – A golflabda
A következő ábra azt mutatja, hogy egy CNN-t a SageMaker Ground Truth címkéivel finomhangoltak, hogy minden egyes személyt besoroljanak a látómezőbe. Ez nehéz a játékosok, caddie-k és rajongók vizuális megjelenésének széles skálája miatt. Miután egy játékost dobónak minősítettek, a CNN-t a labdaérzékelésre finoman beállították a játékos körüli kis területen.
![]()
Labdaút követése
Egy harmadik CNN-t, egy mozgáskövetésre előképzett ResNet architektúrát használtak a labda nyomon követésére a felhelyezés után. A mozgáskövetés alaposan feltárt probléma, így ez a hálózat további finomhangolás nélkül a csővezetékbe integrálva jól teljesített.
Csővezeték kimenet
A CNN-ek kaszkádja határoló dobozokat helyez el az emberek körül, osztályozza az embereket a zölden, érzékeli a labda kezdeti helyzetét, és követi a labdát, amint az elkezd mozogni. A következő ábra a csővezeték feliratozott videokimenetét mutatja. A labda mozgás közbeni pixelpozícióit követi és rögzíti. Vegye figyelembe, hogy a zölden lévő embereket határoló dobozok követik és körvonalazzák; az alján lévő putter helyesen „player putting”-ként van megjelölve, a mozgó labdát pedig egy kis kék határolókeret követi és körvonalazza.
![]()
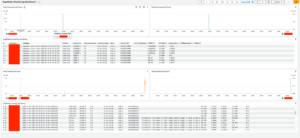
teljesítmény
A csővezeték összetevőinek teljesítményének értékeléséhez címkézett adatokra van szükség. Habár megadtuk a labda földi igazság világpozícióját, nem voltak köztes pontjaink az alapigazsághoz, mint például a labda végső pixelpozíciója vagy a játékos helyezésének pixelhelye. Az általunk elvégzett címkézési munkával megalapozott igazságadatokat dolgoztunk ki a folyamat ezen közbenső kimeneteihez, amelyek lehetővé teszik a teljesítmény mérését.
A játékosok besorolása és a labdaérzékelés pontossága
A játékos elhelyezésének és a labda kezdeti helyének észleléséhez felcímkéztünk egy adatkészletet, és finomhangoltunk egy YOLO v7 CNN modellt a korábban leírtak szerint. A modell az előző személyészlelési modul kimenetét négy osztályba sorolta: egy játékos dob, egy játékos, aki nem dob, más emberek és a golflabda, amint az alábbi ábrán látható.
![]()
Ennek a modulnak a teljesítményét a következő ábrán látható zavarmátrix segítségével értékeljük. Az átlós mezőkben lévő értékek azt mutatják, hogy az előrejelzett osztály milyen gyakran egyezik az alapigazság-címkékből származó tényleges osztállyal. A modell 89%-os vagy jobb felidézéssel rendelkezik minden egyes személyi osztályban, és 79%-ban a golflabdák visszahívásában (ami várható is, mert a modellt előre kiképezték az emberekkel végzett példákra, de nem a golflabdákra; ez javítható több feliratú golflabdát az edzőkészletben).
![]()
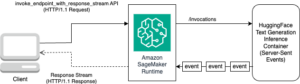
A következő lépés a labdakövető aktiválása. Mivel a labdaérzékelés kimenete egy megbízhatósági valószínűség, beállítható az „észlelt labda” küszöbértéke is, és megfigyelhető, hogy ez hogyan változtatja meg az eredményeket, amelyet a következő ábra foglal össze. Van egy kompromisszum ebben a módszerben, mert magasabb küszöb esetén szükségszerűen kevesebb téves riasztás lesz, de kihagy néhány kevésbé biztos golyót is. 20%-os és 50%-os megbízhatósági küszöböt teszteltünk, és 78%-nál, illetve 61%-nál találtuk a labdaérzékelést. Ezzel az intézkedéssel a 20%-os küszöb jobb. A kompromisszum abban nyilvánul meg, hogy a 20%-os megbízhatósági küszöb esetén az összes észlelés 80%-a valójában golyó volt (20%-a hamis pozitív), míg az 50%-os megbízhatósági küszöb esetén 90%-a golyó volt (10%-a hamis pozitív). Kevesebb téves pozitív esetén az 50%-os megbízhatósági küszöb jobb. Mindkét intézkedés javítható több címkézett adattal egy nagyobb képzési sorozathoz.
![]()
Az észlelési csővezeték átviteli sebessége 10 képkocka/másodperc nagyságrendű, így jelenlegi formájában egyetlen példány sem elég gyors ahhoz, hogy a bemeneten folyamatosan 50 képkocka/s sebességgel futtasson. A golyós lépések utáni kimenet 7 másodperces jelölésének elérése további optimalizálást igényel a várakozási idő tekintetében, talán a folyamat több verziójának párhuzamos futtatásával és a CNN-modellek kvantálás útján történő tömörítésével (például).
Labdaút követési pontosság
Az MMTracking előre betanított CNN-modellje jól működik, de vannak érdekes meghibásodási esetek. A következő ábra egy olyan esetet mutat be, amikor a nyomkövető elindul a labdán, kibontja a határoló mezőt, hogy magában foglalja a putter fejet és a labdát is, majd sajnos követi a putter fejét és elfelejti a labdát. Ebben az esetben a putter fej fehérnek tűnik (esetleg a tükörreflexió miatt), így érthető a zavar; a nyomkövető CNN nyomon követéséhez és finomhangolásához szükséges címkézett adatok segíthetnek ennek javításában a jövőben.
![]()
Következtetés
Ebben a bejegyzésben egy olyan moduláris csővezeték fejlesztését vitattuk meg, amely lokalizálja a játékosokat a kamera látóterében, meghatározza, hogy melyik játékos helyezi el, és követi a labdát, ahogy az a csésze felé halad.
Az AWS és a PGA TOUR együttműködésével kapcsolatos további információkért lásd: A PGA TOUR az AWS-szel párosul, hogy újragondolhassa a rajongói élményt.
A szerzőkről
![]() James Golden az Amazon Bedrock alkalmazott tudósa, gépi tanulási és idegtudományi háttérrel.
James Golden az Amazon Bedrock alkalmazott tudósa, gépi tanulási és idegtudományi háttérrel.
![]() Henry Wang az Amazon Generative AI Innovation Center alkalmazott tudósa, ahol generatív AI-megoldásokat kutat és épít az AWS-ügyfelek számára. A sportra, valamint a média- és szórakoztatóiparra összpontosít, és korábban különböző sportligákkal, csapatokkal és műsorszolgáltatókkal dolgozott együtt. Szabadidejében szeret teniszezni és golfozni.
Henry Wang az Amazon Generative AI Innovation Center alkalmazott tudósa, ahol generatív AI-megoldásokat kutat és épít az AWS-ügyfelek számára. A sportra, valamint a média- és szórakoztatóiparra összpontosít, és korábban különböző sportligákkal, csapatokkal és műsorszolgáltatókkal dolgozott együtt. Szabadidejében szeret teniszezni és golfozni.
![]() Tryambak Gangopadhyay az AWS Generative AI Innovation Center alkalmazott tudósa, ahol az iparágak legkülönbözőbb skáláján működő szervezetekkel működik együtt. Feladata a kutatások lefolytatása és a generatív mesterségesintelligencia-megoldások fejlesztése a kulcsfontosságú üzleti kihívások kezelésére és a mesterséges intelligencia elterjedésének felgyorsítására.
Tryambak Gangopadhyay az AWS Generative AI Innovation Center alkalmazott tudósa, ahol az iparágak legkülönbözőbb skáláján működő szervezetekkel működik együtt. Feladata a kutatások lefolytatása és a generatív mesterségesintelligencia-megoldások fejlesztése a kulcsfontosságú üzleti kihívások kezelésére és a mesterséges intelligencia elterjedésének felgyorsítására.
- SEO által támogatott tartalom és PR terjesztés. Erősödjön még ma.
- PlatoData.Network Vertical Generative Ai. Erősítse meg magát. Hozzáférés itt.
- PlatoAiStream. Web3 Intelligence. Felerősített tudás. Hozzáférés itt.
- PlatoESG. Carbon, CleanTech, Energia, Környezet, Nap, Hulladékgazdálkodás. Hozzáférés itt.
- PlatoHealth. Biotechnológiai és klinikai vizsgálatok intelligencia. Hozzáférés itt.
- Forrás: https://aws.amazon.com/blogs/machine-learning/ball-position-tracking-in-the-cloud-with-the-pga-tour/
- :van
- :is
- :nem
- :ahol
- $ UP
- 1
- 10
- 100
- 4k
- 4K kamerák
- 50
- a
- képesség
- Képes
- Rólunk
- gyorsul
- pontosság
- pontosan
- elérése
- át
- tényleges
- tulajdonképpen
- mellett
- cím
- Örökbefogadás
- Előny
- Után
- AI
- AI elfogadása
- Minden termék
- lehetővé
- megengedett
- mentén
- Is
- Bár
- amazon
- Az Amazon Web Services
- an
- és a
- szögletes
- Másik
- bármilyen
- bárki
- látszólagos
- megjelenések
- Megjelenik
- alkalmazott
- hozzávetőleges
- építészet
- VANNAK
- TERÜLET
- körül
- AS
- értékeli
- értékelni
- At
- automatikusan
- elkerülése érdekében
- AWS
- háttér
- labda
- BE
- mert
- óta
- előtt
- hogy
- Jobb
- között
- Túl
- Kék
- mindkét
- Alsó
- Doboz
- dobozok
- Bring
- épít
- üzleti
- de
- by
- szoba
- kamerák
- TUD
- végrehajtott
- vízesések
- eset
- esetek
- Központ
- bizonyos
- kihívások
- Változások
- osztály
- osztályok
- besorolás
- osztályozott
- osztályoz
- klipek
- szorosan
- közelebb
- felhő
- klub
- CNN
- együttműködés
- bonyolult
- összetevő
- alkatrészek
- azzal jellemezve,
- Kiszámít
- számítógép
- Számítógépes látás
- vezető
- bizalom
- zavar
- áll
- tovább
- folyamatos
- folyamatosan
- konvolúciós neurális hálózat
- helyesen
- összefüggések
- megfelel
- tudott
- kritikus
- Csésze
- Jelenlegi
- Jelenleg
- Ügyfelek
- vágás
- dátum
- nap
- Nap
- mély
- szállít
- igazolták
- leírni
- leírt
- Design
- tervezett
- Ellenére
- Érzékelés
- Határozzuk meg
- meghatározza
- Fejleszt
- fejlett
- fejlesztése
- Fejlesztés
- különböző
- nehéz
- közvetlenül
- tárgyalt
- távolság
- számos
- le-
- rajz
- két
- alatt
- minden
- Minden ember
- Korábban
- könnyen
- hatékonyság
- bármelyik
- végén
- növelése
- elég
- Szórakozás
- Egész
- Eter (ETH)
- értékelés
- Még
- esemény
- Minden
- példa
- példák
- kitágul
- várható
- tapasztalat
- Tapasztalatok
- feltárása
- kivonat
- Kudarc
- hamis
- ventilátor
- rajongók
- GYORS
- táplálás
- kevesebb
- mező
- Ábra
- utolsó
- Találjon
- megtalálása
- koncentrál
- következő
- A
- forma
- talált
- négy
- KERET
- gyakran
- ból ből
- funkció
- további
- jövő
- játék
- nemző
- Generatív AI
- adott
- golf
- gps
- nagymértékben
- Zöld
- Földi
- kéz
- Legyen
- he
- fej
- segít
- Magas
- <p></p>
- övé
- történeti
- holding
- Lyuk
- Hogyan
- http
- HTTPS
- illusztrálja
- kép
- képek
- azonnal
- fontos
- javul
- javított
- in
- tartalmaz
- Beleértve
- iparágak
- információ
- kezdetben
- alapvetően
- Innováció
- bemenet
- példa
- integrált
- érdekes
- Közbülső
- bele
- jár
- IT
- ITS
- Munka
- jpg
- címkézés
- Címkék
- nagyobb
- végül
- Késleltetés
- ligákban
- tanulás
- balra
- kevesebb
- mint
- Valószínű
- Kedvencek
- él
- elhelyezkedés
- helyszínek
- logika
- gép
- gépi tanulás
- csinál
- kézzel
- sok
- jel
- párosított
- Mátrix
- Lehet..
- intézkedés
- intézkedések
- Média
- módszer
- hiányzik
- ML
- modell
- modellek
- moduláris
- modul
- Modulok
- több
- mozgás
- áthelyezve
- mozog
- mozgó
- többszörös
- kell
- Közel
- szükségszerűen
- elengedhetetlen
- hálózat
- hálózatok
- ideg-
- neurális hálózat
- neurális hálózatok
- Neuroscience
- következő
- következő generációs
- megjegyezni
- szám
- tárgy
- objektumok
- megfigyelni
- of
- gyakran
- on
- egyszer
- ONE
- optimalizálás
- or
- narancs
- érdekében
- szervezetek
- Más
- ki
- vázolt
- teljesítmény
- kimenetek
- felett
- átfogó
- Párhuzamos
- múlt
- ösvény
- Emberek (People)
- mert
- teljesít
- teljesítmény
- teljesített
- talán
- person
- PGA túra
- csővezeték
- pixel
- elhelyezés
- Helyek
- Plató
- Platón adatintelligencia
- PlatoData
- játszani
- játékos
- játékos
- pont
- pont
- pozíció
- pozicionált
- pozíciók
- pozitív
- lehetséges
- esetleg
- állás
- powered
- előre
- jósolt
- miniszterelnök
- előző
- valószínűség
- Probléma
- folyamat
- feltéve,
- folytat
- elhelyezés
- hatótávolság
- Nyers
- nyers adatok
- real-time
- valós idejű adatok
- új
- feljegyzett
- Piros
- utal
- visszaverődés
- szükség
- kötelező
- megköveteli,
- kutatás
- kutatások
- Felbontás
- illetőleg
- REST
- pihenő
- korlátoz
- kapott
- Eredmények
- Szerep
- futás
- futás
- sagemaker
- azonos
- színhely
- Tudós
- pontozás
- Keresés
- keres
- Második
- Series of
- Szolgáltatások
- készlet
- lövés
- előadás
- mutatott
- Műsorok
- Egyszerű
- egyszerűen
- egyetlen
- Méret
- kicsi
- So
- Megoldások
- néhány
- Spektrum
- Sport
- kezdet
- Kezdve
- kezdődik
- Lépés
- Lépései
- tárolás
- memorizált
- folyó
- sikeresen
- rendszer
- Vesz
- célok
- csapat
- technikák
- tenisz
- kipróbált
- mint
- hogy
- A
- A jövő
- a világ
- azok
- akkor
- Ott.
- Ezek
- ők
- Harmadik
- ezt
- alaposan
- három
- küszöb
- áteresztőképesség
- idő
- időbélyeg
- nak nek
- felső
- Végösszeg
- Bejárás
- verseny
- felé
- vágány
- Csomagkövetés
- Vonat
- kiképzett
- Képzések
- Átalakítás
- kiváltó
- igazság
- típus
- Végül
- érthető
- sajnálatos módon
- us
- használ
- használt
- használ
- segítségével
- rendszerint
- Értékek
- különféle
- keresztül
- videó
- Megnézem
- nézetek
- látható
- látomás
- vizuális
- kívánatos
- volt
- we
- háló
- webes szolgáltatások
- JÓL
- voltak
- amikor
- mivel
- vajon
- ami
- fehér
- WHO
- széles
- Széleskörű
- lesz
- val vel
- belül
- nélkül
- dolgozott
- művek
- világ
- lenne
- Yolo
- zephyrnet