03. toukokuuta 2023 (Nanowerk-uutiset) Siitä lähtien, kun termi "pehmeä robotiikka" otettiin käyttöön vuonna 2008, alan insinöörit ovat rakentaneet erilaisia esityksiä joustavista koneista, jotka ovat hyödyllisiä etsinnässä, liikkumisessa, kuntoutuksessa ja jopa avaruudessa. Yksi inspiraation lähde: eläinten tapa liikkua luonnossa. MIT-tutkijoiden ryhmä on ottanut tämän askeleen eteenpäin ja kehittyy SoftZoo, biovaikutteinen alusta, jonka avulla insinöörit voivat tutkia pehmeän robotin yhteissuunnittelua. Kehys optimoi algoritmeja, jotka koostuvat suunnittelusta, joka määrittää, miltä robotti näyttää; ja ohjaus tai järjestelmä, joka mahdollistaa robotin liikkeen ja parantaa sitä, miten käyttäjät luovat automaattisesti ääriviivat mahdollisille koneille.
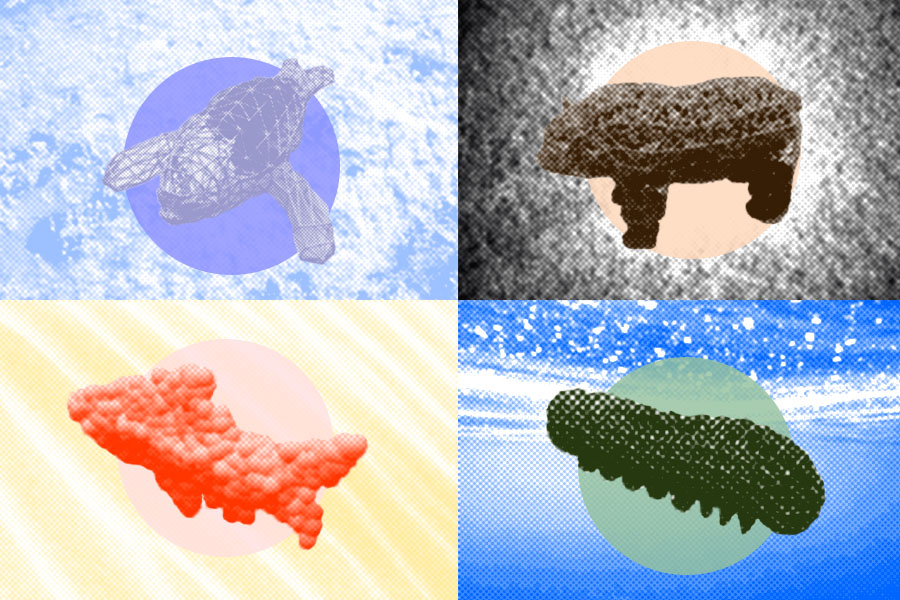 Tutkijat kehittivät järjestelmän pehmeälle robotin yhteissuunnittelulle, mikä tarkoittaa robotin suunnittelun yhteistä etsimistä ja optimointia – robotin muotoa, mihin robotin runkoon lihakset laitetaan, kuinka pehmeä robotti on eri kehon alueilla; ja robotin suunnittelun perusteella tapa ohjata sitä tavoitetehtävän saavuttamiseksi. (Kuva: Alex Shipps/MIT CSAIL ja tutkijat) Kun kävellä villillä puolella, alustalla on 3D-malleja eläimistä, kuten pandakarhuista, kaloista, haista ja toukista, jotka voivat simuloida pehmeitä robotiikkatehtäviä, kuten liikkumista. , ketterä kääntyminen ja polun seuraaminen eri ympäristöissä. Olipa kyse lumesta, autiomaasta, savesta tai vedestä, alusta näyttää eri mallien suorituskyvyn kompromisseja eri maastoissa.
"Kehityskehyksemme voi auttaa käyttäjiä löytämään parhaat konfiguraatiot robotin muodolle, jolloin he voivat suunnitella pehmeitä robotiikkaalgoritmeja, jotka voivat tehdä monia erilaisia asioita", sanoo MIT:n tohtoriopiskelija Tsun-Hsuan Wang, Computer Science and Artificial Intelligence Laboratoryn tytäryhtiö. CSAIL), joka on hankkeen johtava tutkija. "Pohjimmiltaan se auttaa meitä ymmärtämään parhaat strategiat, joilla robotit voivat olla vuorovaikutuksessa ympäristönsä kanssa." SoftZoo on kattavampi kuin vastaavat alustat, jotka jo simuloivat suunnittelua ja ohjausta, koska se mallintaa liikettä, joka reagoi eri biomien fyysisiin ominaisuuksiin. Rungon monipuolisuus perustuu erottuvaan monifysiikkamoottoriin, joka mahdollistaa fyysisen järjestelmän useiden näkökohtien simuloinnin samanaikaisesti, kuten jäällä kääntyvän hylkeenpoikasen tai kosteikkoympäristön poikki hyppäävän toukkan. Moottorin erottuvuus optimoi yhteissuunnittelun vähentämällä laskennallisten ohjaus- ja suunnitteluongelmien ratkaisemiseen tarvittavien usein kalliiden simulaatioiden määrää. Tämän seurauksena käyttäjät voivat suunnitella ja siirtää pehmeitä robotteja kehittyneemmillä, määritellyillä algoritmeilla.
Järjestelmän kyky simuloida vuorovaikutusta eri maaston kanssa kuvaa morfologian merkitystä, biologian haaraa, joka tutkii eri organismien muotoja, kokoja ja muotoja. Ympäristöstä riippuen jotkin biologiset rakenteet ovat optimaalisempia kuin toiset, aivan kuten verrattaisiin samanlaisia tehtäviä suorittavien koneiden piirustuksia.
Nämä biologiset ääriviivat voivat inspiroida erikoistuneempaa, maastokohtaista keinotekoista elämää. "Meduusan hellävaraisesti aaltoileva geometria mahdollistaa sen, että se kulkee tehokkaasti suurien vesistöjen poikki, inspiroimalla tutkijoita kehittämään uusia pehmeitä robotteja ja avaamaan rajattomat mahdollisuudet siihen, mihin täysin in silicossa viljellyt keinotekoiset olennot voivat pystyä", Wang sanoo. "Lisäksi sudenkorennot voivat suorittaa erittäin ketteriä liikkeitä, joita muut lentävät olennot eivät voi suorittaa, koska niiden siivissä on erityisiä rakenteita, jotka muuttavat niiden massakeskiötä lentäessään. Alustamme optimoi liikkumisen samalla tavalla kuin sudenkorento on luonnollisesti taitavampi toimimaan ympäristönsä läpi." Aiemmin robotit kamppailivat liikkuakseen sotkuisissa ympäristöissä, koska heidän ruumiinsa ei ollut ympäristön mukainen. SoftZoon avulla suunnittelijat voivat kuitenkin kehittää robotin aivoja ja kehoa samanaikaisesti optimoimalla sekä maanpäälliset että vesikoneita olemaan tietoisempia ja erikoistuneita. Lisääntyneen käyttäytymisen ja morfologisen älykkyyden ansiosta robotit olisivat sitten hyödyllisempiä pelastustehtävien suorittamisessa ja tutkimusten suorittamisessa. Jos ihminen katosi esimerkiksi tulvan aikana, robotti voisi mahdollisesti kulkea vedet tehokkaammin, koska se optimoitiin SotftZoo-alustalla esitellyillä menetelmillä.
"SoftZoo tarjoaa avoimen lähdekoodin simulaation pehmeille robottien suunnittelijoille, auttaen heitä rakentamaan reaalimaailman robotteja paljon helpommin ja joustavammin ja nopeuttaen samalla koneiden liikkumiskykyä erilaisissa ympäristöissä", lisää tutkimuksen toinen kirjoittaja Chuang Gan, MIT:n tutkija. -IBM Watson AI Lab, josta tulee pian apulaisprofessori Massachusettsin yliopistossa Amherstissa.
"Tämä laskennallinen lähestymistapa pehmeiden robottien runkojen ja niiden aivojen (eli niiden ohjaimien) yhteissuunnitteluun avaa oven nopeasti räätälöityjen koneiden luomiseen, jotka on suunniteltu tiettyyn tehtävään", lisää Daniela Rus, CSAIL:n ja Andrew and the Andrew and the Andrew'n johtaja. Erna Viterbi MIT:n sähkötekniikan ja tietojenkäsittelytieteen laitoksen (EECS) professori, joka on myös työn kirjoittaja.
Ennen minkään tyyppisen robotin rakentamista kehys voisi korvata luonnottomien kohtausten kenttätestauksen. Esimerkiksi karhun kaltaisen robotin käytöksen arvioiminen autiomaassa voi olla haastavaa Bostonin kaupunkitasangoilla työskentelevälle tutkimusryhmälle. Sen sijaan pehmeän robotiikan insinöörit voisivat käyttää SoftZoon kolmiulotteisia malleja simuloidakseen erilaisia malleja ja arvioidakseen, kuinka tehokkaita heidän robottejaan ohjaavat algoritmit ovat navigoinnissa. Tämä puolestaan säästäisi tutkijoiden aikaa ja resursseja.
Silti nykyisten valmistustekniikoiden rajoitukset estävät näiden pehmeiden robottimallien herättämisen henkiin. "Simulaatiosta fyysiseen robottiin siirtyminen on edelleen ratkaisematta ja vaatii lisätutkimuksia", Wang sanoo. "SoftZoon lihasmalleja, alueellisesti vaihtelevaa jäykkyyttä ja sensorointia ei voida toteuttaa yksinkertaisesti nykyisillä valmistustekniikoilla, joten työskentelemme näiden haasteiden parissa." Jatkossa alustan suunnittelijat katselevat ihmismekaniikan sovelluksia, kuten manipulointia, koska se pystyy testaamaan robottiohjausta. Osoittaakseen tämän potentiaalin Wangin tiimi suunnitteli 3D-varren, joka heitti lumipalloa eteenpäin.
Tutkijat kehittivät järjestelmän pehmeälle robotin yhteissuunnittelulle, mikä tarkoittaa robotin suunnittelun yhteistä etsimistä ja optimointia – robotin muotoa, mihin robotin runkoon lihakset laitetaan, kuinka pehmeä robotti on eri kehon alueilla; ja robotin suunnittelun perusteella tapa ohjata sitä tavoitetehtävän saavuttamiseksi. (Kuva: Alex Shipps/MIT CSAIL ja tutkijat) Kun kävellä villillä puolella, alustalla on 3D-malleja eläimistä, kuten pandakarhuista, kaloista, haista ja toukista, jotka voivat simuloida pehmeitä robotiikkatehtäviä, kuten liikkumista. , ketterä kääntyminen ja polun seuraaminen eri ympäristöissä. Olipa kyse lumesta, autiomaasta, savesta tai vedestä, alusta näyttää eri mallien suorituskyvyn kompromisseja eri maastoissa.
"Kehityskehyksemme voi auttaa käyttäjiä löytämään parhaat konfiguraatiot robotin muodolle, jolloin he voivat suunnitella pehmeitä robotiikkaalgoritmeja, jotka voivat tehdä monia erilaisia asioita", sanoo MIT:n tohtoriopiskelija Tsun-Hsuan Wang, Computer Science and Artificial Intelligence Laboratoryn tytäryhtiö. CSAIL), joka on hankkeen johtava tutkija. "Pohjimmiltaan se auttaa meitä ymmärtämään parhaat strategiat, joilla robotit voivat olla vuorovaikutuksessa ympäristönsä kanssa." SoftZoo on kattavampi kuin vastaavat alustat, jotka jo simuloivat suunnittelua ja ohjausta, koska se mallintaa liikettä, joka reagoi eri biomien fyysisiin ominaisuuksiin. Rungon monipuolisuus perustuu erottuvaan monifysiikkamoottoriin, joka mahdollistaa fyysisen järjestelmän useiden näkökohtien simuloinnin samanaikaisesti, kuten jäällä kääntyvän hylkeenpoikasen tai kosteikkoympäristön poikki hyppäävän toukkan. Moottorin erottuvuus optimoi yhteissuunnittelun vähentämällä laskennallisten ohjaus- ja suunnitteluongelmien ratkaisemiseen tarvittavien usein kalliiden simulaatioiden määrää. Tämän seurauksena käyttäjät voivat suunnitella ja siirtää pehmeitä robotteja kehittyneemmillä, määritellyillä algoritmeilla.
Järjestelmän kyky simuloida vuorovaikutusta eri maaston kanssa kuvaa morfologian merkitystä, biologian haaraa, joka tutkii eri organismien muotoja, kokoja ja muotoja. Ympäristöstä riippuen jotkin biologiset rakenteet ovat optimaalisempia kuin toiset, aivan kuten verrattaisiin samanlaisia tehtäviä suorittavien koneiden piirustuksia.
Nämä biologiset ääriviivat voivat inspiroida erikoistuneempaa, maastokohtaista keinotekoista elämää. "Meduusan hellävaraisesti aaltoileva geometria mahdollistaa sen, että se kulkee tehokkaasti suurien vesistöjen poikki, inspiroimalla tutkijoita kehittämään uusia pehmeitä robotteja ja avaamaan rajattomat mahdollisuudet siihen, mihin täysin in silicossa viljellyt keinotekoiset olennot voivat pystyä", Wang sanoo. "Lisäksi sudenkorennot voivat suorittaa erittäin ketteriä liikkeitä, joita muut lentävät olennot eivät voi suorittaa, koska niiden siivissä on erityisiä rakenteita, jotka muuttavat niiden massakeskiötä lentäessään. Alustamme optimoi liikkumisen samalla tavalla kuin sudenkorento on luonnollisesti taitavampi toimimaan ympäristönsä läpi." Aiemmin robotit kamppailivat liikkuakseen sotkuisissa ympäristöissä, koska heidän ruumiinsa ei ollut ympäristön mukainen. SoftZoon avulla suunnittelijat voivat kuitenkin kehittää robotin aivoja ja kehoa samanaikaisesti optimoimalla sekä maanpäälliset että vesikoneita olemaan tietoisempia ja erikoistuneita. Lisääntyneen käyttäytymisen ja morfologisen älykkyyden ansiosta robotit olisivat sitten hyödyllisempiä pelastustehtävien suorittamisessa ja tutkimusten suorittamisessa. Jos ihminen katosi esimerkiksi tulvan aikana, robotti voisi mahdollisesti kulkea vedet tehokkaammin, koska se optimoitiin SotftZoo-alustalla esitellyillä menetelmillä.
"SoftZoo tarjoaa avoimen lähdekoodin simulaation pehmeille robottien suunnittelijoille, auttaen heitä rakentamaan reaalimaailman robotteja paljon helpommin ja joustavammin ja nopeuttaen samalla koneiden liikkumiskykyä erilaisissa ympäristöissä", lisää tutkimuksen toinen kirjoittaja Chuang Gan, MIT:n tutkija. -IBM Watson AI Lab, josta tulee pian apulaisprofessori Massachusettsin yliopistossa Amherstissa.
"Tämä laskennallinen lähestymistapa pehmeiden robottien runkojen ja niiden aivojen (eli niiden ohjaimien) yhteissuunnitteluun avaa oven nopeasti räätälöityjen koneiden luomiseen, jotka on suunniteltu tiettyyn tehtävään", lisää Daniela Rus, CSAIL:n ja Andrew and the Andrew and the Andrew'n johtaja. Erna Viterbi MIT:n sähkötekniikan ja tietojenkäsittelytieteen laitoksen (EECS) professori, joka on myös työn kirjoittaja.
Ennen minkään tyyppisen robotin rakentamista kehys voisi korvata luonnottomien kohtausten kenttätestauksen. Esimerkiksi karhun kaltaisen robotin käytöksen arvioiminen autiomaassa voi olla haastavaa Bostonin kaupunkitasangoilla työskentelevälle tutkimusryhmälle. Sen sijaan pehmeän robotiikan insinöörit voisivat käyttää SoftZoon kolmiulotteisia malleja simuloidakseen erilaisia malleja ja arvioidakseen, kuinka tehokkaita heidän robottejaan ohjaavat algoritmit ovat navigoinnissa. Tämä puolestaan säästäisi tutkijoiden aikaa ja resursseja.
Silti nykyisten valmistustekniikoiden rajoitukset estävät näiden pehmeiden robottimallien herättämisen henkiin. "Simulaatiosta fyysiseen robottiin siirtyminen on edelleen ratkaisematta ja vaatii lisätutkimuksia", Wang sanoo. "SoftZoon lihasmalleja, alueellisesti vaihtelevaa jäykkyyttä ja sensorointia ei voida toteuttaa yksinkertaisesti nykyisillä valmistustekniikoilla, joten työskentelemme näiden haasteiden parissa." Jatkossa alustan suunnittelijat katselevat ihmismekaniikan sovelluksia, kuten manipulointia, koska se pystyy testaamaan robottiohjausta. Osoittaakseen tämän potentiaalin Wangin tiimi suunnitteli 3D-varren, joka heitti lumipalloa eteenpäin.
Tutkijat kehittivät järjestelmän pehmeälle robotin yhteissuunnittelulle, mikä tarkoittaa robotin suunnittelun yhteistä etsimistä ja optimointia – robotin muotoa, mihin robotin runkoon lihakset laitetaan, kuinka pehmeä robotti on eri kehon alueilla; ja robotin suunnittelun perusteella tapa ohjata sitä tavoitetehtävän saavuttamiseksi. (Kuva: Alex Shipps/MIT CSAIL ja tutkijat) Kun kävellä villillä puolella, alustalla on 3D-malleja eläimistä, kuten pandakarhuista, kaloista, haista ja toukista, jotka voivat simuloida pehmeitä robotiikkatehtäviä, kuten liikkumista. , ketterä kääntyminen ja polun seuraaminen eri ympäristöissä. Olipa kyse lumesta, autiomaasta, savesta tai vedestä, alusta näyttää eri mallien suorituskyvyn kompromisseja eri maastoissa.
"Kehityskehyksemme voi auttaa käyttäjiä löytämään parhaat konfiguraatiot robotin muodolle, jolloin he voivat suunnitella pehmeitä robotiikkaalgoritmeja, jotka voivat tehdä monia erilaisia asioita", sanoo MIT:n tohtoriopiskelija Tsun-Hsuan Wang, Computer Science and Artificial Intelligence Laboratoryn tytäryhtiö. CSAIL), joka on hankkeen johtava tutkija. "Pohjimmiltaan se auttaa meitä ymmärtämään parhaat strategiat, joilla robotit voivat olla vuorovaikutuksessa ympäristönsä kanssa." SoftZoo on kattavampi kuin vastaavat alustat, jotka jo simuloivat suunnittelua ja ohjausta, koska se mallintaa liikettä, joka reagoi eri biomien fyysisiin ominaisuuksiin. Rungon monipuolisuus perustuu erottuvaan monifysiikkamoottoriin, joka mahdollistaa fyysisen järjestelmän useiden näkökohtien simuloinnin samanaikaisesti, kuten jäällä kääntyvän hylkeenpoikasen tai kosteikkoympäristön poikki hyppäävän toukkan. Moottorin erottuvuus optimoi yhteissuunnittelun vähentämällä laskennallisten ohjaus- ja suunnitteluongelmien ratkaisemiseen tarvittavien usein kalliiden simulaatioiden määrää. Tämän seurauksena käyttäjät voivat suunnitella ja siirtää pehmeitä robotteja kehittyneemmillä, määritellyillä algoritmeilla.
Järjestelmän kyky simuloida vuorovaikutusta eri maaston kanssa kuvaa morfologian merkitystä, biologian haaraa, joka tutkii eri organismien muotoja, kokoja ja muotoja. Ympäristöstä riippuen jotkin biologiset rakenteet ovat optimaalisempia kuin toiset, aivan kuten verrattaisiin samanlaisia tehtäviä suorittavien koneiden piirustuksia.
Nämä biologiset ääriviivat voivat inspiroida erikoistuneempaa, maastokohtaista keinotekoista elämää. "Meduusan hellävaraisesti aaltoileva geometria mahdollistaa sen, että se kulkee tehokkaasti suurien vesistöjen poikki, inspiroimalla tutkijoita kehittämään uusia pehmeitä robotteja ja avaamaan rajattomat mahdollisuudet siihen, mihin täysin in silicossa viljellyt keinotekoiset olennot voivat pystyä", Wang sanoo. "Lisäksi sudenkorennot voivat suorittaa erittäin ketteriä liikkeitä, joita muut lentävät olennot eivät voi suorittaa, koska niiden siivissä on erityisiä rakenteita, jotka muuttavat niiden massakeskiötä lentäessään. Alustamme optimoi liikkumisen samalla tavalla kuin sudenkorento on luonnollisesti taitavampi toimimaan ympäristönsä läpi." Aiemmin robotit kamppailivat liikkuakseen sotkuisissa ympäristöissä, koska heidän ruumiinsa ei ollut ympäristön mukainen. SoftZoon avulla suunnittelijat voivat kuitenkin kehittää robotin aivoja ja kehoa samanaikaisesti optimoimalla sekä maanpäälliset että vesikoneita olemaan tietoisempia ja erikoistuneita. Lisääntyneen käyttäytymisen ja morfologisen älykkyyden ansiosta robotit olisivat sitten hyödyllisempiä pelastustehtävien suorittamisessa ja tutkimusten suorittamisessa. Jos ihminen katosi esimerkiksi tulvan aikana, robotti voisi mahdollisesti kulkea vedet tehokkaammin, koska se optimoitiin SotftZoo-alustalla esitellyillä menetelmillä.
"SoftZoo tarjoaa avoimen lähdekoodin simulaation pehmeille robottien suunnittelijoille, auttaen heitä rakentamaan reaalimaailman robotteja paljon helpommin ja joustavammin ja nopeuttaen samalla koneiden liikkumiskykyä erilaisissa ympäristöissä", lisää tutkimuksen toinen kirjoittaja Chuang Gan, MIT:n tutkija. -IBM Watson AI Lab, josta tulee pian apulaisprofessori Massachusettsin yliopistossa Amherstissa.
"Tämä laskennallinen lähestymistapa pehmeiden robottien runkojen ja niiden aivojen (eli niiden ohjaimien) yhteissuunnitteluun avaa oven nopeasti räätälöityjen koneiden luomiseen, jotka on suunniteltu tiettyyn tehtävään", lisää Daniela Rus, CSAIL:n ja Andrew and the Andrew and the Andrew'n johtaja. Erna Viterbi MIT:n sähkötekniikan ja tietojenkäsittelytieteen laitoksen (EECS) professori, joka on myös työn kirjoittaja.
Ennen minkään tyyppisen robotin rakentamista kehys voisi korvata luonnottomien kohtausten kenttätestauksen. Esimerkiksi karhun kaltaisen robotin käytöksen arvioiminen autiomaassa voi olla haastavaa Bostonin kaupunkitasangoilla työskentelevälle tutkimusryhmälle. Sen sijaan pehmeän robotiikan insinöörit voisivat käyttää SoftZoon kolmiulotteisia malleja simuloidakseen erilaisia malleja ja arvioidakseen, kuinka tehokkaita heidän robottejaan ohjaavat algoritmit ovat navigoinnissa. Tämä puolestaan säästäisi tutkijoiden aikaa ja resursseja.
Silti nykyisten valmistustekniikoiden rajoitukset estävät näiden pehmeiden robottimallien herättämisen henkiin. "Simulaatiosta fyysiseen robottiin siirtyminen on edelleen ratkaisematta ja vaatii lisätutkimuksia", Wang sanoo. "SoftZoon lihasmalleja, alueellisesti vaihtelevaa jäykkyyttä ja sensorointia ei voida toteuttaa yksinkertaisesti nykyisillä valmistustekniikoilla, joten työskentelemme näiden haasteiden parissa." Jatkossa alustan suunnittelijat katselevat ihmismekaniikan sovelluksia, kuten manipulointia, koska se pystyy testaamaan robottiohjausta. Osoittaakseen tämän potentiaalin Wangin tiimi suunnitteli 3D-varren, joka heitti lumipalloa eteenpäin.
- SEO-pohjainen sisällön ja PR-jakelu. Vahvista jo tänään.
- PlatoAiStream. Web3 Data Intelligence. Tietoa laajennettu. Pääsy tästä.
- Tulevaisuuden lyöminen Adryenn Ashley. Pääsy tästä.
- Lähde: https://www.nanowerk.com/news2/robotics/newsid=62936.php
- :on
- :On
- :ei
- :missä
- $ YLÖS
- 10
- 11
- 12
- 8
- 9
- a
- kyky
- kiihtyvä
- Saavuttaa
- poikki
- Lisää
- hyväksytty
- Suosittelijaksi
- ketterä
- AI
- alex
- algoritmit
- Salliminen
- mahdollistaa
- jo
- an
- ja
- Andrew
- eläimet
- Toinen
- Kaikki
- sovellukset
- lähestymistapa
- OVAT
- ARM
- aseet
- keinotekoinen
- tekoäly
- AS
- näkökohdat
- arvioidessaan
- Avustaja
- At
- kirjoittaja
- automaattisesti
- Vauva
- perustua
- BE
- Bears
- koska
- ollut
- ennen
- PARAS
- biologia
- elin
- boston
- sekä
- Aivot
- äly
- Sivuliike
- Tuominen
- rakentaa
- Rakentaminen
- by
- CAN
- ei voi
- kyvyt
- kykenee
- keskus
- haasteet
- haastava
- muuttaa
- Yhteiskirjoittaja
- tulee
- vertaamalla
- täydellinen
- Suoritettuaan
- mukautuva
- kattava
- tietokone
- Tietojenkäsittelyoppi
- johtavat
- Konfigurointi
- ohjaus
- valvonta
- voisi
- Luominen
- CSAIL
- Nykyinen
- räätälöityjä
- Päivämäärä
- osoittaa
- osoittivat
- osoittaa
- osasto
- Riippuen
- DESERT
- Malli
- suunniteltu
- suunnittelijat
- mallit
- määrittää
- kehittää
- kehitetty
- kehittämällä
- eri
- Johtaja
- useat
- do
- Mukaan
- sudenkorennot
- Sudenkorento
- aikana
- helposti
- Tehokas
- tehokkaasti
- Sähkötekniikka
- mahdollistaa
- Moottori
- Tekniikka
- Engineers
- täysin
- ympäristö
- ympäristöissä
- ydin
- arvioida
- Jopa
- esimerkki
- kallis
- tutkimus
- Ominaisuudet
- ala
- Löytää
- joustava
- tulva
- lentävät
- jälkeen
- varten
- lomakkeet
- Eteenpäin
- Puitteet
- alkaen
- edelleen
- tulevaisuutta
- tuottaa
- geometria
- tietty
- ymmärtää
- Olla
- auttaa
- auttaa
- auttaa
- Miten
- HTTPS
- ihmisen
- ICE
- if
- havainnollistaa
- kuva
- merkitys
- parantaminen
- in
- Mukaan lukien
- kasvoi
- Inspiraatio
- innostaa
- innoittava
- sen sijaan
- Älykkyys
- olla vuorovaikutuksessa
- vuorovaikutukset
- IT
- SEN
- jpg
- laboratorio
- laboratorio
- suuri
- johtaa
- elämä
- pitää
- rajoitukset
- katso
- näyttää joltakin
- Koneet
- Manipulointi
- monet
- Massa
- Massachusetts
- Saattaa..
- välineet
- mekaniikka
- menetelmät
- Keskimmäinen
- puuttuva
- tehtävät
- MIT
- mallit
- lisää
- liike
- liikkua
- liike
- paljon
- Navigoida
- suunnistus
- Uusi
- numero
- esineet
- of
- usein
- on
- ONE
- avoimen lähdekoodin
- avaaminen
- avautuu
- optimaalinen
- optimoitu
- Optimismi
- optimoimalla
- or
- Muut
- Muuta
- meidän
- ääriviivat
- polku
- suorittaa
- suorituskyky
- henkilö
- fyysinen
- foorumi
- Platforms
- Platon
- Platonin tietotieto
- PlatonData
- mahdollisuuksia
- mahdollinen
- mahdollisesti
- aiemmin
- ongelmia
- Opettaja
- projekti
- tarjoaa
- laittaa
- nopeasti
- Reagoi
- todellinen maailma
- tajusi
- vähentämällä
- alueet
- kuntoutus
- jäännökset
- tarvitaan
- Vaatii
- pelastus
- tutkimus
- tutkija
- Tutkijat
- Esittelymateriaalit
- johtua
- robotti
- robotiikka
- robotit
- sama
- Säästä
- sanoo
- kohtaukset
- tiede
- Tiedemies
- haku
- useat
- Muoto
- muodot
- Sharks
- puoli
- samankaltainen
- simulointi
- samanaikaisesti
- koska
- koot
- lumi
- So
- Pehmeä
- SOLVE
- jonkin verran
- Pian
- hienostunut
- lähde
- Tila
- erityinen
- erikoistunut
- erityinen
- määritelty
- pino
- seistä
- Vaihe
- Yhä
- strategiat
- opiskelija
- opinnot
- tutkimus
- niin
- järjestelmä
- ottaen
- Kohde
- Tehtävä
- tehtävät
- joukkue-
- tekniikat
- maa-
- testi
- Testaus
- kuin
- että
- -
- Tulevaisuus
- heidän
- Niitä
- sitten
- Nämä
- ne
- asiat
- tätä
- vaikka?
- Kautta
- Throwing
- aika
- että
- matkustaa
- VUORO
- Kääntyminen
- tyyppi
- ymmärtää
- yliopisto
- rajoittamaton
- kaupunki-
- us
- käyttää
- Käyttäjät
- käyttämällä
- eri
- hyvin
- oli
- vesi
- Vedet
- Watson
- Tapa..
- we
- olivat
- Mitä
- kun
- onko
- joka
- vaikka
- KUKA
- Villi
- villieläimet
- tulee
- with
- Referenssit
- työskentely
- olisi
- zephyrnet
Lisää aiheesta Nanowerk

Tutkijat löytävät uuden menetelmän metallinanohiukkasten tuottamiseksi käytettäväksi katalyytteinä
Lähdesolmu: 3039388
Aikaleima: Joulukuu 28, 2023

Parannetun tehokkuuden parantavien silikonilaitteiden suunnittelun ohjaaminen
Lähdesolmu: 2839986
Aikaleima: Elokuu 23, 2023
Robottimehiläiset ja -juuret tarjoavat toivoa terveellisemmästä ympäristöstä ja riittävästä ravinnosta
Lähdesolmu: 1977685
Aikaleima: Helmikuu 25, 2023

Nanokokoista hiilimateriaalia voitaisiin käyttää Downin oireyhtymän hoitoon
Lähdesolmu: 2778869
Aikaleima: Heinäkuu 21, 2023
OLED-televisioiden ydinmateriaaleista luotu neuromorfinen synapsi
Lähdesolmu: 2541090
Aikaleima: Mar 24, 2023

Kestävien puolijohteiden nopeuttaminen "monielementtimusteella"
Lähdesolmu: 2911790
Aikaleima: Syyskuu 28, 2023
Kevytkäyttöinen nanokatalyytti vedyn valmistamiseksi auringonvalolla
Lähdesolmu: 3053672
Aikaleima: Jan 10, 2024
Tutkijat tarkkailevat siirtymistä kaoottiseen käyttäytymiseen nanometrin asteikolla
Lähdesolmu: 1982382
Aikaleima: Helmikuu 27, 2023

Robotit ja tekoäly tekevät yhteistyötä löytääkseen erittäin selektiivisiä katalyyttejä
Lähdesolmu: 1940293
Aikaleima: Helmikuu 3, 2023