See lühike postitus kirjeldab mõningaid laserjaama täiustusi, mille tegime katsete kaugjuhtimiseks.
Seadistusprobleemid
Meie laserrikke süstimise platvorm on valmistatud mikroskoobist, mida kasutatakse laserallika fokuseerimiseks testitava seadmeni. See on varustatud infrapunakaameraga, et jälgida sihitud kiibi sisemist arhitektuuri ja reguleerida laserkiire kuju. Õnneks on see varustatud mootoriga lavaga, mis võimaldab meie kohandatud tarkvararakendusest laserkiirt üle kiibi liigutada. Kõik meie poolt välja töötatud tööriistad töötavad Linuxi operatsioonisüsteemis ja seetõttu on hea internetiühenduse olemasolul võimalik neid kasutada SSH-ühenduse kaudu. Mikroskoobikaamera reaalajas pildiga seotud latentsusprobleemid, mille lahendasime kiiresti, lülitades sisse SSH tihendamise valiku (-C), mis pole vaikimisi lubatud ja vähendab oluliselt nõutavat voogesituse ribalaiust. Sellegipoolest vajasid mõned elemendid sel ajal endiselt kohapealset sekkumist:
- Kaamera valgusallika juhtimine: spetsiaalne seade pakub infrapunavalgust, mis valgustab kaamera visualiseerimiseks kiipi.
- Kaamera mehaanilise katiku avamine või sulgemine: see katik on osa mikroskoobist ja tuleb laseri kasutamisel sulgeda.
- Mikroskoobi objektiivi vahetamine: 4 erinevat optilist objektiivi on paigaldatud mehaanilisele pöörlevale tornile ja võimaldavad erinevaid mikroskoobi suurendusi.
Allpool kirjeldatakse üksikasjalikult, kuidas kohandasime oma katsestendi katiku ja valgusallika kaugjuhtimiseks. Eelkõige soovisime piirata nende kohanduste kulusid ja teha need võimalikult kiiresti kättesaadavaks.
Valgusallika juhtimine
Pooljuhtide ränisubstraat on infrapunavalgusele poolläbipaistev ja infrapunakaameraga on seetõttu võimalik jälgida ahelate sisemist ehitust. Vaatluse võimaldamiseks peab vooluahel olema valgustatud infrapuna valgusallikaga. Meie lasermikroskoop tarniti koos spetsiaalse valgusallika seadmega, a Hayashi LA-150CE, millel on toitelüliti ja nupp valguse intensiivsuse reguleerimiseks, nagu allpool näidatud. Lasertestimise kampaania alustamisel lülitame tavaliselt valgusallika välja, kuna see võib komponente häirida, eriti kui proove lahjendatakse.

Vaadates seadmete tagaosa, leidsime "kauglüliti" ja välise pistik oli saadaval. Saime aru, et see valgusallikas pakub kaugjuhtimisvõimalust mõne möödunud aastatuhande pistiku kaudu. Veebist võib leida vähe dokumentatsiooni, kuid tuvastasime, et Hayashi kataloogis on olemas a LAN juhtseade ühildub selle valgusallikaga. Selle toote tootmine on aga lõpetatud. Samuti pole LAN-ühendus kuigi mugav. Samast kataloogist leidsime valgusallika pistiku spetsifikatsiooni. Kuigi see pole väga üksikasjalik, piisas selle proovimiseks.
Kaugjuhtimispuldi pinout Hayashi toodete kataloogist: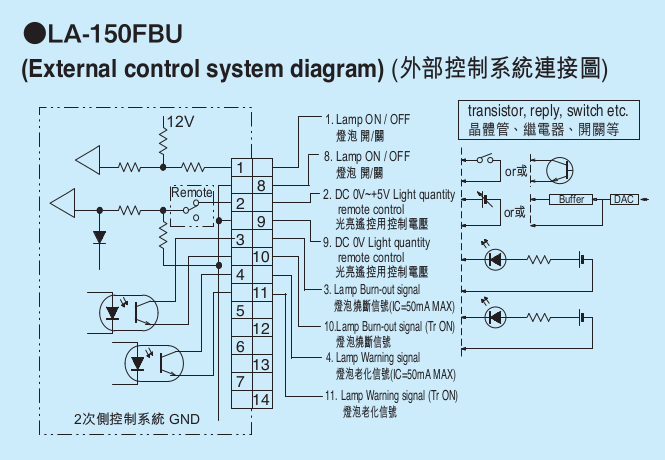
Sellel liidesel on kaks peamist huvitavat funktsiooni:
- Digitaalseid kontakte 1 ja 8 saab kasutada lambi sisse- ja väljalülitamiseks, lühistades neid või mitte. Pin 8 on tegelikult maapind, nii et ainult tihvt 1 on tõesti asjakohane.
- Analoogviik 2 juhib valguse intensiivsust signaaliga vahemikus 0 V (minimaalne intensiivsus) kuni 5 V (maksimaalne intensiivsus). Kui kaugrežiim on lubatud, jäetakse esipaneeli potentsiomeeter mööda ja valguse intensiivsust juhitakse otse selle kontakti abil.
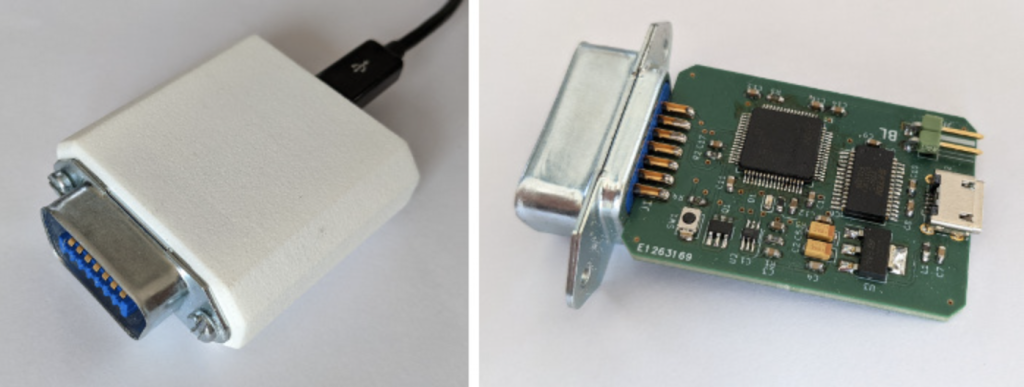
Otsustasime ehitada nullist oma Hayashi Light kaugjuhtimispult kasutades järgmisi osi:
- STM32 mikrokontroller manustatud rakenduse koodi majutamiseks,
- FT232 USB-jadamuundur, mis võimaldab juhtida donglit USB-lt,
- AD5621B digitaal-analoogmuundur 0 kuni 5 V analoogsignaali genereerimiseks valguse intensiivsuse reguleerimiseks.
Me kujundasime PCB kasutades KiCad. Ausalt öeldes võib see disain olla pisut liiga suur: mikrokontroller on praeguse vajaduse jaoks liiga suur ja FT232 võidakse eemaldada, kuna STM32 seadmetel on juba USB-võimalused tarkvara arendamise aja hinnaga. Meie eesmärk oli muuta see kiireks ja määrdunud ning taaskasutada mõnda meie juba kavandatud skeemi.
Lõbu pärast ja kuna usume, et see on väga paljutõotav keel, arendasime välja Rustis mikrokontrolleri püsivara.
Lõpuks kujundasime lihtsa plastikust korpuse, kasutades FreeCAD, ja printis selle rakendusega skulptuur.
Ootamatult oli selle projekti kõige keerulisem osa pistiku tuvastamine (meessoost poole jaoks viide 5710140 firmalt Amphenol) ja ka selle ostmine, kuna see on vananenud ja paljud tarnijad seda enam ei müü. Osade tarnijate otsingumootor oktopart aitab.
Kõik skeemid ja kujundusfailid on saadaval meie lehel GitHubi hoidla.
Kaamera katiku juhtimine
Mikroskoobis jagavad laserkiir ja kaamera sama optilist rada. Kui laser pildistab, peegeldub osa valgusest räni poolt ja see tabab kaamerat. Anduri kahjustamise vältimiseks, mis võib pikemas perspektiivis lõppeda surnud pikslitega, saab kaamera ees oleva optilise mehaanilise katiku sulgeda. Katik on käsitsi ja selle käivitamiseks on vaja vähe jõudu.
Kaugjuhtimise võimaldamiseks ostsime väikese samm-mootori ja a TIC T834 samm-mootori kontroller firmalt Polulu. Töötasime välja ja printisime välja 3D hammasrattad ja mikroskoobile paigaldatava korpuse, et katikut koos mootoriga liigutada.
TIC T834 vajab mootorile energia andmiseks toiteallikat, kuid kuna meie mootor ei võta palju voolu, siis lühistasime T834 USB-toiteallika ka mootori toiteks. TIC-kontrollereid on väga lihtne seadistada ja kasutada, see on hästi dokumenteeritud ja meil kulus väga vähe aega mootori juhtimiseks meie tarkvaratööriistadest. Töötasime Pythonis välja väikese kontrolleriklassi, mis on nüüd meiesse integreeritud püstaažid raamatukogu.
Sammmootori kontrollerid peavad välja selgitama mootori praeguse asendi, kui see on sisse lülitatud. Seda tehakse lähtestamisprotseduuriga, kus mootor pöörleb, kuni kontaktlüliti ütleb kontrollerile, et mootor on nullasendis. Kasutasime lihtsat lülitit, mis on otse ühendatud T834-ga, millel on see funktsioon sisse ehitatud.
Meie prinditud 3D-kereosa ei olnud väga täpne ja kaks käiku ei töötanud esimesel korral õigesti. Kuumuse abil saime plastosa pisut painutada, et parandada hammasrataste vahet. Pärast mõningaid reguleerimisi saime kaamera katiku kaugjuhtimisega suurepäraselt avada ja sulgeda!
Mehaaniline disain on saadaval meie lehel GitHubi hoidla.
Lõplik mõtted
Valgusallika ja kaamera katiku juhtimise integreerimine võimaldas meil paljusid lasertestimise kampaaniaid eemalt läbi viia. Samuti on see varasemast mugavam, kuna katiku sulgemine ja valguse väljalülitamine saab nüüd laseri sisselülitamisel toimuda automaatselt, samas kui varem nõudis see inimese füüsilist sekkumist ja võis kergesti ununeda.
Objektiivitorni juhtimise osas on mootoriga tornid juba olemas, kuid kahjuks on need üsna kallid ja neid võib olla keeruline asendada. Hetkel me ei leidnud ühtegi lihtsat ja odavat lahendust. Torni pööramine välise mootoriga on raske, eriti kuna seal on vedru, mis lukustab torni paigale, kui objektiiv on mikroskoobiga joondatud. Samuti on piiratud kaal, mida saame motoriseeritud etapile lisada. See on hetkel veel lahtine teema, kuid see ei takista kaugtöötamist, piirdume vaid valitud suurendusega.
Lõpuks, proovi asendamine, kui see on katki, nõuab siiski juurdepääsu laborisse. Õnneks ei juhtu seda liiga tihti. Lõpuks võime ühele tütarplaadile mitu vooluahelat multipleksida, nii et saame põletada paar seadet enne, kui vajame füüsilist asendamist, kuid me ei töötanud sellist lahendust välja.

- SEO-põhise sisu ja PR-levi. Võimenduge juba täna.
- PlatoAiStream. Web3 andmete luure. Täiustatud teadmised. Juurdepääs siia.
- Tuleviku rahapaja Adryenn Ashley. Juurdepääs siia.
- Ostke ja müüge IPO-eelsete ettevõtete aktsiaid koos PREIPO®-ga. Juurdepääs siia.
- Allikas: https://www.ledger.com/blog/laser-improvements
- :on
- :on
- :mitte
- : kus
- 1
- 14
- 24
- 3d
- 8
- a
- Võimalik
- juurdepääs
- täpne
- üle
- tegelikult
- Kohandused
- lisama
- kohandused
- pärast
- joondatud
- Materjal: BPA ja flataatide vaba plastik
- võimaldama
- võimaldab
- juba
- Ka
- an
- ja
- mistahes
- enam
- taotlus
- arhitektuur
- OLEME
- AS
- At
- automaatselt
- saadaval
- Bandwidth
- BE
- Laius
- sest
- enne
- Uskuma
- alla
- vahel
- Suur
- Natuke
- keha
- ostnud
- Katki
- ehitama
- sisseehitatud
- põlema
- kuid
- by
- kaamera
- Kampaania
- Kampaaniad
- CAN
- võimeid
- kataloog
- kiip
- klass
- lähedal
- suletud
- Sulgemine
- kood
- kokkusobiv
- komponendid
- seotud
- ühendus
- Side
- kontakt
- kontrollida
- kontrollitud
- kontroller
- kontroll
- kontrolli
- Mugav
- parandada
- Maksma
- võiks
- Praegune
- tava
- kohandatud
- surnud
- tegelema
- otsustatud
- pühendunud
- vaikimisi
- Disain
- kavandatud
- üksikasjalik
- arendama
- arenenud
- & Tarkvaraarendus
- seade
- seadmed
- DID
- erinev
- raske
- otse
- dokumentatsioon
- ei
- tehtud
- alla
- juhtida
- ajal
- kergesti
- lihtne
- elemendid
- varjatud
- lubatud
- energia
- lisaseadmed
- piisavalt
- seadmed
- varustatud
- eriti
- lõpuks
- eksisteerima
- olemas
- kallis
- katseid
- väline
- silmitsi seisnud
- vead
- tunnusjoon
- FUNKTSIOONID
- vähe
- Faile
- Lõpuks
- leidma
- esimene
- Esimest korda
- Keskenduma
- Järel
- eest
- Sundida
- unustatud
- Õnneks
- avastatud
- murdosa
- Alates
- esi-
- lõbu
- lõhe
- põlvkond
- eesmärk
- hea
- suuresti
- Maa
- juhtuda
- Raske
- Olema
- aitama
- Tulemus
- võõrustaja
- Kuidas
- aga
- HTTPS
- inim-
- tuvastatud
- identifitseerimiseks
- pilt
- in
- integreeritud
- huvitav
- Interface
- segab
- sisemine
- Internet
- internetiühendus
- sekkumine
- probleem
- küsimustes
- IT
- lihtsalt
- labor
- keel
- laser
- Hilinemine
- latentsusprobleemid
- pearaamat
- Raamatukogu
- valgus
- LIMIT
- piiratud
- Linux
- vähe
- elama
- Lukud
- Pikk
- Partii
- odava
- tehtud
- põhiline
- tegema
- Tegemine
- käsiraamat
- palju
- max laiuse
- maksimaalne
- mai..
- mehaaniline
- Mikroskoobi
- millennium
- miinimum
- viis
- hetk
- rohkem
- kõige
- Mootor
- liikuma
- liikuv
- peab
- Vajadus
- vajav
- ei
- nüüd
- eesmärk
- eesmärgid
- jälgima
- vananenud
- of
- maha
- Pakkumised
- sageli
- on
- ainult
- avatud
- tegutsevad
- operatsioonisüsteemi
- valik
- or
- et
- meie
- välja
- pandeemia
- paneel
- osa
- eriline
- osad
- minevik
- tee
- füüsiline
- mänd
- Koht
- plast
- inimesele
- Platon
- Platoni andmete intelligentsus
- PlatoData
- positsioon
- võimalik
- post
- võim
- Laboratooriumi toiteallikas
- sisse
- vältida
- Toode
- Toodet
- projekt
- paljutõotav
- anda
- tingimusel
- annab
- ostma
- Python
- Kiire
- kiiresti
- alates
- tõesti
- vähendab
- kajastatud
- asjakohane
- kauge
- Eemaldatud
- asendama
- asendamine
- nõutav
- Vajab
- kaasa
- taaskasutada
- jooks
- Rust
- sama
- Otsing
- väljavalitud
- Pooljuhid
- seade
- kuju
- Jaga
- veetud
- shooting
- Lühike
- Shorted
- Pikkus
- külg
- Signaali
- Räni
- lihtne
- alates
- ühekordne
- väike
- So
- tarkvara
- tarkvaraarenduse
- müüdud
- lahendus
- mõned
- Varsti
- allikas
- täpsustus
- Spin
- kevad
- Stage
- alustatud
- jaam
- Veel
- STM32
- streaming
- struktuur
- selline
- Tarnijate
- varustama
- Lüliti
- süsteem
- suunatud
- ütleb
- test
- Testimine
- kui
- et
- .
- Neile
- Seal.
- seetõttu
- nad
- see
- need
- kuigi?
- Läbi
- aeg
- et
- liiga
- võttis
- töövahendid
- püüdma
- Pöördunud
- Pööramine
- kaks
- all
- arusaadav
- kahjuks
- kuni
- us
- usb
- kasutama
- Kasutatud
- kasutamine
- tavaliselt
- väga
- visualiseerimine
- tagaotsitav
- oli
- we
- web
- kaal
- Hästi
- olid
- millal
- mis
- will
- koos
- töö
- töötab eemalt
- veel
- sa
- sephyrnet
- null