Magnet-elastne fotoresisti ettevalmistus
Kõik kemikaalid osteti ettevõttelt Sigma-Aldrich, kui pole teisiti märgitud. Elastne fotoresist koosnes 70 massiprotsenti uretaanakrülaadi oligomeerist, ristsildajana 28.40 massiprotsenti polü(etüleenglükool)diakrülaadist, 1-(4-(2-(dimetüülamino)etoksü)fenüül)-2-fenüül-1-butanoonist 1.5 massiprotsenti. % fotoinitsiaatorina ja 2,2,6,6-tetrametüülpiperidiin-1-oksüüli 0.05 massiprotsenti ja 0.05 massiprotsenti metüülmetakrülaadi kompleksi kustutajana. Segu mullitati lämmastikuga 30 minutit ja vaakumiti 30 minutit degaseerimiseks. MNP-d valmistati klassikalise kaassadestamise meetodil. Lühidalt, 5.38 g FeCl3· 6H2O ja 1.98 g FeCl2· 4H2O lahustati 200 ml H-s2O. Seejärel tilgutati segusse 7 ml 25% ammooniumhüdroksiidi, mida segati pidevalt 3 tundi. Seejärel pesti kogutud osakesi kolm korda veega ja modifitseeriti täiendavalt 3-(trimetoksüsilüül)propüülmetakrülaadiga etanoolis kontsentratsioonides 1 massiprotsenti ja 0.5 massiprotsenti temperatuuril 80 °C 1 tund (viide. 20). MNP-d koguti pärast kolm korda etanooliga pesemist. Magnet-elastne fotoresist valmistati MNP-de segamisel elastsesse fotoresisti kontsentratsiooniga 5% või 10% spetsiaalse mikrokilpkonna jaoks, mis sisaldas MNP-de topeltkontsentratsiooni. Lõpuks mulliti magnet-elastne fotoresisti N-ga2 30 min ja vaakumis 30 min. Valmistatud fotoresisti tuleb enne kasutamist alati hoida valguse eest temperatuuril 4 °C.
Numbriline analüüs
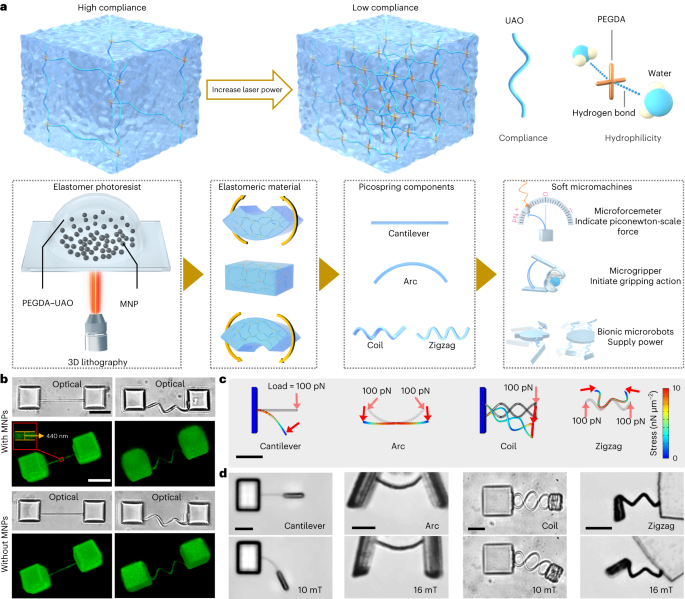
Mikrostruktuuride tõhusaks kujundamiseks materjali omaduste põhjal viidi läbi simulatsioonid, et ennustada mikrostruktuuride kuju muutumist enne valmistamist. Joonistel fig. 1d ja 6d, ja laiendatud andmed, fig. 3 ja 7, kasutasime kaubandusliku lõplike elementide analüüsi tarkvara Comsol kasutaja määratud multifüüsika moodulit. Kõiki tahkeid aineid ja vedelikke peeti kokkusurumatuks. Youngi moodul E Vastavalt konsooli pikospringi mehaanilise iseloomustamise tulemustele määrati mikroforcemeetrite jaoks 0.422, 1.525 MPa ja muude elastsete komponentide jaoks 0.49, 10 MPa. Kõigi materjalide Poissoni suhtarvuks määrati XNUMX, eeldades, et materjal on peaaegu kokkusurumatu. Kõigis simulatsioonides määrati sperma sööde (SP-TALP) Newtoni vedelikuks tihedusega XNUMX3 kg m-3 ja viskoossus 1 mPa s. Lõplike elementide analüüsi käigus anti rakendatav koormus lokaalses koordinaatsüsteemis magnetmomendi funktsioonina. Magnetiline pöördemoment Tm arvutati pehmele magnetilisele materjalile rakendatud lihtsustatud funktsiooni abil51:
$$begin{array}{l}{T}^{{mathrm{m}}}=frac{chi V}{mu }{B}^{2},sin left(theta -arctanleft(tanteeta korda frac{1 +0.118chi }{1+0.432chi }parem)sqrt{{left(frac{costheta }{1+0.118chi }right)}^{2}+{left(frac{sintheta }{1+0.432chi } paremal)}^{2}}end{massiiv}$$
kus θ on nurk magnetvälja suhtes, mille voo tihedus on B segmendi hõlpsale magnetteljele; χ, V ja μ esindavad segmendi magnetilist tundlikkust ja mahumahtu ning vee magnetilist läbilaskvust (vt üksikasju lisatekstist 2). Mehaanika simulatsiooni piirkoormused rakendati paralleelselt lokaalses koordinaatsüsteemis elastsete vedrude ristlõikega. Joonisel fig 1 näidatud mikrokilpkonna lestadele rakendatud magnetmomendid. 6d arvutati vastavalt ülaltoodud võrrandile, lihtsustades lestad ristkülikukujuliste kujudena kahemõõtmelise projektsioonina.
Lisaks analüüsiti mikropingviini kinemaatilise mudeliga, mis lahendati Runge-Kutta neljanda järgu iteratiivse meetodiga MATLAB-iga. Nagu on näidatud laiendatud andmetel, joonisel fig. 6d, mikropingviinide lestad ja torso lihtsustati risttahukatena. Elastsed komponendid lihtsustati lineaarsete vedrudena. Elastse komponendi paindejäikus saadi tasakaalustatud magnetmomendi sobitamisega läbipaindenurga suhtes, mida mõõdetakse poolena iga magnetvälja kahe lesta varieeruvast nurgast. Täiendavad simulatsiooniparameetrid leiate lisatekstist 2. Simulatsiooni tulemusi kasutati seejärel mikrostruktuuride kavandamise ja valmistamise juhtimiseks ning need kinnitasid lisaks katsetulemused.
Mikrostruktuuri valmistamine
Mikrostruktuurid valmistati 3D otsese laserkirjutussüsteemi (Photonic Professional GT, Nanoscribe) abil. Valmistamise ajal määrati laseri võimsuseks 25.0 mW kõigi jäikade osade jaoks, 5.5 mW jõudu tuvastavate pikosvedrude jaoks ja 6.0 mW kõigi teiste elastsete komponentide jaoks, kui pole teisiti määratud. Pärast kokkupuudet töötati proovi 24 tundi atsetoonis, et eemaldada kõik polümeriseerimata komponendid. Nagu on näidatud laiendatud andmetel, joonisel fig. 1a, muudeti keskkond atsetoonilt veepõhisele söötmele, mille paksendajaks oli pluroonhape F127 (PF127) järk-järgult kiirusega 200 μl min.-1 12 tunniks. Pärast seda asendati lahus õrnalt pipetiga SP-TALP-iga. Picospringil põhinevate mikrostruktuuride struktuurne terviklikkus oli pärast neid toiminguid hästi hoitud (laiendatud andmed, joonis XNUMX). 1b). Nimelt asendati mikrohaardekatses SP-TALP lisaks munajuhavedelikku jäljendava rakusöötmega (0.4% metüültselluloosi sisaldav rakusööde).52.
Mikroostsillaatori, vedruga mikroostsillaatori ja mikroforcemeetri valmistamise ajal silaaniti klaassubstraat enne kasutamist, et vältida mikrostruktuuride eraldumist aluspinnast. 3-(trimetoksüsilüül)propüülmetakrülaati kasutati metakrülaadi otsrühmade kinnitamiseks substraadile, moodustades kovalentse sideme klaassubstraadi ja magnet-elastse fotoresisti vahel.53.
Mikrokilpkonna valmistamise ajal tehti säritust kaks korda, kasutades fotoresisti koos MNP-dega ja ilma. Esiteks kasutati torso valmistamiseks elastset fotoresisti ilma MNP-deta. Pärast seda asendati fotoresist magnet-elastse fotoresistiga. Klaassubstraat liimiti klaaskapillaariga joondusindikaatoriks, mis joondati proovihoidikul eelnevalt märgitud märgijoontega, et proov joondada esimese kokkupuutega samasse asendisse. Algus leiti taas valmistatud torso asendi põhjal ja struktuuri koodi korrigeeriti kindla nurgaga torso orientatsiooni muutuse alusel, et maksimaalselt suurendada valmistamise täpsust. Seejärel viidi läbi teine kokkupuude, et valmistada lestad ja elastsed osad.
Materjali iseloomustus
Mikroforcemeetri 980D-geomeetria saamiseks ergutuslaseriga 3 nm ja emissiooni tuvastamisel 488 nm kasutati konfokaalset laserspektri mikroskoopi (Zeiss LSM 580). Struktuuri 3D-mudeli genereerimiseks ja mõõtmete mõõtmiseks kasutati ImageJ-d.
Konsooli elastsust kalibreeriti optilise lõksusüsteemiga (Lumicks C-Trap). Optilise lõksu laseri võimsuse kalibreerimiseks kasutati viie mikromeetriseid polüstüreeni mikrohelmeid, andes teatud laservõimsuste püüdmisjõu konstandid. Seejärel tõmmati mikrohelmed, et deformeerida mikroforcemeeter võimalikult aeglaselt, nii et tõmbejõudu saaks tähelepanuta jätta. Seejärel saab määrata mikrofortsemeetri paindekõvera rakendatud jõu suhtes, registreerides mikrohelme positsioonid ja konsooli läbipaindenurgad (vt üksikasju lisatekstist 1.2). Iga mõõtmisrühma korrati kolme prooviga. Pilte ja videoid analüüsiti ImageJ-ga ja andmed paigaldati OriginPro-ga. SP-TALP viskoossuseks võeti 1 mPa s. 25 mW võimsusega valmistatud jäikade osade mehaaniline iseloomustus viidi läbi AFM-i abil, mis on näidatud täiendaval joonisel fig. 3 (vt üksikasju lisatekstist 1.2).
Materjali magnetiseerimisomadust iseloomustati ülijuhtiva kvantinterferentsiseadme magnetomeetriga (SQUID, Quantum Design) toatemperatuuril kuni 100 mT magnetväljaga. Proovid valmistati 8,848 ristkülikukujulise tahke aine massiivina pikkusega 15 μm ja ristlõike pindalaga 16 μm2. Mahutundlikkuseks arvutati 0.1220, XNUMX, kohandades OriginPro tarkvara kasutades magnetiseerimist rakendatud välja suhtes.
Tõukejõu mõõtmine mikroforcemeetriga
Sperma-mootori mikrotorud, torukujulised mikrojoad ja mikroheeliksid valmistati kõik TPL-iga, kasutades fotoresistina IP-DIP-i. Pärast kokkupuudet kuivatati proove kriitilise punkti kuivatis pärast 20-minutilist arendamist mr-Dev 600-s (Micro Resist) ja pesti kolm korda isopropanooliga. Sperma-mootori mikrotorud ja mikroheeliksid kaeti pihustamise teel Fe (10 nm) / Ti (5 nm) metallkihtidega. Fe (10 nm) / Ti (5 nm) / Pt (10 nm) kihid kaeti torukujulisele mikrojoale e-kiirsadestamise teel. Veiste sperma valmistati vastavalt eelnevalt teatatud protokollile2. Kõiki proove töödeldi enne kasutamist PF127 lahuses (1%) 0.5 tundi. Sperma-mootorite mõõtmine viidi läbi mikrofortsemeetri kambris 1 ml SP-TALP-ga, mis sisaldas umbes 103 mikrotuubid ja 104 sperma. Sperma-mootor tekkis siis, kui sperma sattus juhusliku ujumise teel mikrotorusse. Seejärel juhiti sperma-mootorit välise magnetvälja abil, umbes 2 mT juures, mikroforcemeetri tegevusriba suunas. Magnetväli reguleeriti tegevusvardaga risti, et vältida magnetpöördemomendi mõju konsooli deformatsioonile. Mikrodüüside mõõtmine viidi läbi SP-TALP-s, mis sisaldas 1% H2O2 ja 0.1% naatriumdodetsüülsulfaati. Ligikaudu 20 mikrojoa lisati ja neid juhiti samal viisil kui spermamootoreid. Mikroheeliksi mõõtmine viidi läbi, rakendades magnetiliseks aktiveerimiseks pöörlevat magnetvälja 10 mT sagedusel 40 Hz. Tõukejõud, st elastsusjõud, kui sperma-mootori kiirus on null, arvutati lineaarse interpolatsiooni abil mikroforcemeetri kalibreerimiskõveras, välja arvatud mikrojoa tõukejõud, mis saadi lõplike elementide analüüsi simulatsioonikõveralt. lühikese mikrofortsemeetri kohta. Kõik mõõtmised viidi läbi temperatuuril 37 ° C, kui pole märgitud teisiti. Videoid ja andmeid analüüsisid ImageJ ja OriginPro. Elastsed jõud arvutati interpolatsiooni teel joonisel fig. 3c, d.
Mikrogripperi magnetjuhtimine
Magnetkäivitamine viidi läbi elektromagnetisüsteemiga (Magnebotix MFG 100-i). Ajaliselt järjestikused magnetväljad genereeriti projekteerimise teel Bx, By ja Bz osade kaupa funktsioonidega. Pärast söötme vahetamise protsessi töödeldi mikroroboti ja mikrogripperi proove ultrahelivannis 5 minutit. Seejärel puhuti 100 μl pipetiga proovid õrnalt söötmega, et eemaldada mikrostruktuurid substraadist täielikult ilma silaanimiseta. Mikrorobotite katsetes dispergeeriti proovid seejärel otse SP-TALP-is ja töötati magnetväljas. Mikrogripperi katsetes lisati proovilahusele eelnevalt ettevalmistatud mikroobjektid (mikrohelmed ja mikroklombid). Mikrohelmeste proov saadi 5 μm polüstüreeni mikrohelmeste otsesel dispergeerimisel umbes 10 °C juures.3 ml-1 nagu on näidatud joonisel fig. 4c, f. Valgupõhised mikrohüübed sünteesiti veise seerumi albumiiniga, kasutades mikroemulsioonmeetodit, nagu eelnevalt kirjeldatud2. Munajuha vedelikku jäljendav lahus valmistati HeLa rakusöötme põhjal, mis sisaldas 0.4, XNUMX% metüültselluloosi, et jäljendada vedeliku viskoelastset omadust. Mikrohaaratsi liikumiseks rakendati pöörlevaid magnetvälju ja haardekopa avamiseks rakendati ühtlaseid magnetvälju. Videoid ja andmeid käsitleti ImageJ ja OriginPro abil.
Pärast HeLa rakkudega manipuleerimist värviti sihtrakk elus/surnud värvimiskomplektiga, mis sisaldas fluorestseiindiatsetaati ja propiidiumjodiidi. Pärast 10-minutilist inkubatsiooniperioodi jäädvustati mitme kanaliga fluorestsentskujutised, kasutades ergastust lainepikkusel 470 nm elusrakkude puhul (emissiooni lainepikkus 530 nm) ja 540 nm surnud rakkude puhul (emissiooni lainepikkus 618 nm). Seejärel kultiveeriti sihtmärk-HeLa rakku mikrogripperi ämbris veel 4 tundi. Seejärel viidi läbi teine manipuleerimine HeLa raku transportimiseks mööda ristkülikukujulist trajektoori. Pärast seda manipuleerimist saadi taas fluorestsentskujutised. Sihtraku rohelise fluorestsentsi olemasolu pärast manipuleerimist näitas, et erinevalt juhuslikult surnud rakkudes täheldatud punasest fluorestsentsist ei avaldanud mikrogripper manipuleerimise ajal negatiivset mõju raku elujõulisusele. Rakkude orientatsiooni juhtimine, mis on näidatud joonisel fig. 4g rakendati rakendatud magnetvälja vektori suuna muutmisega pärast seda, kui mikrohaarats oli haaranud rakuklastri. Mööda rakendati ühtlane 6 mT magnetväli +x suund, et haarata ja määratleda rakuklastri esialgne orientatsioon. Lahtri orientatsiooni muutmiseks x-y (leiutamine) või x-z (kõrguse) tasapindadel pöörati magnetvälja vektoreid lihtsalt mööda z or y teljed mis tahes määral nõudmisel. Lahtri orientatsiooni muutmiseks y-z tasapinnal (rull), rakendati teist pöörlevat magnetvälja 2 mT ja 20 Hz juures. Rakkude klastri orientatsioon y-z tasapinda muudeti, muutes pöörleva magnetvälja pöörlemistelge, samal ajal kui ühtlast magnetvälja 6 mT säilitati piki +x telg.
Mikropingviini ja mikrokilpkonna magnetjuhtimine
Ajasümmeetrilise liikumisega mikrorobotid ei suuda madala Reynoldsi arvu korral saavutada netonihet54. Tõhus strateegia aja sümmeetria katkestamiseks on muuta mikroroboti orientatsioon morfimise ajal selle orientatsioonist taastumise ajal erinevaks. Demonstratsioonina rakendame mikropingviini juhtimiseks orientatsiooni vahetamise strateegiat. Laiendatud andmed Joon. 6a kujutab magnetväljade jadasid tsükli kestusega 9 s, nagu on näidatud joonisel fig. 6a: 0–1 s, rakendati piki ühtlast 16 mT magnetvälja x telg (faasid 1–2); 1–1.5 s, pöörlemismagnetväli 16 mT piki y telg; 1.5–2.5 s, ühtlane magnetväli 2 mT piki z telg (faasid 2–3); 2.5–4.5 s, pöörlemismagnetväli 2 mT piki y telg; 4.5–5.5 s, ühtlane magnetväli 16 mT piki x telg (faasid 3–4); 5.5–6 s, pöörlemismagnetväli 16 mT piki y telg; 6–7 s, ühtlane magnetväli 2 mT piki z telg (faasid 4–1); 7–9 s, pöörlemismagnetväli 2 mT piki y telg. Pärast 9 sekundilist tsüklit taastab mikropingviin oma esialgse orientatsiooni ja saavutab netonihke piki x telg. Laiendatud andmed Joon. 6b näitab mikropingviini magnetvälja jadasid tsükli kestusega 5.5 s tõhusamal ujumisviisil. Sel juhul segati ühtlane ja pöörlev magnetväli, võimaldades samaaegset mikropingviini pöörlemist ja klapi avamist ja sulgemist.
Orientatsiooni vahetamise juhtimisstrateegia üheks puuduseks on kogu roboti samaaegne pöörlemine, hoolimata selle universaalsest kohaldatavusest elastsete mikrorobotite puhul võrgunihke genereerimiseks. Seda pöörlemist saab vältida, kasutades pikosvedruste komplekti, mis juhivad ebahomogeense magnetiseerimisega mikrorobotite erinevaid liikuvaid osi, näiteks mikrokilpkonna. Laiendatud andmed Joon. 7a näitab lõplike elementide analüüsi simulatsiooni tulemusi, mis aitavad leida magnetväljade kõige tõhusamaid suundi. Lõpliku juhtimisstrateegia magnetvälja jada on näidatud laiendatud andmete joonisel fig. 7b. Mikrokilpkonna netonihke tekitamiseks on vaja ainult ühtlaseid magnetvälju, mis tulenevad vasak- ja parempoolsete pikosvedrude koordineeritud käitamis- ja puhverdusfunktsioonidest, mis kontrollivad erinevaid lestasid. Seejärel kontrolliti mikrokilpkonna liikumist ainult kahes mõõtmes x-y tasapind ilma pöörlemise või nihketa z telg: 0–1 s, 2 mT piki 15° (positiivne suund vastupäeva) suunas +y suund (mikrokilpkonna sümmeetriline telg); 1–1.5 s, 2 mT piki −75° alates +y; 1.5–2.5 s, 16 mT piki –105° piki +y; 2.5–3 s, 2 mT mööda +y. Kõik mikrorobotite liikumiskatsed viidi läbi PBS-is temperatuuril 25 ° C. Mikrokilpkonn sisaldab kahekordset MNP-de kontsentratsiooni, mida kontrolliti tsükliperioodiga 0.8, XNUMX sekundit (laiendatud andmed, joonis XNUMX). 8) võrreldavate faasilõikudega 0–0.25 s, 0.25–0.4 s, 0.4–0.7 s ja 0.7–0.8 s.
Biosobivuse hindamine
HeLa rakke kasutati mikromasinate, eriti mikrogripperi massiivide biosobivuse hindamiseks. Lühidalt, 7 valmistatud mikrohaaratsi massiivi proovi asetati 6-süvendiliste plaatide rakukultuuri süvenditesse ja täideti 3 ml söötmega. Kontrollrühma süvendid täideti ainult rakusöötmega. Igasse süvendisse külvati umbes 105 HeLa rakud. Pärast 48-tunnist inkubeerimist värviti 1 süvend mikrohaarderühmast ja 1 kontrollrühmast otse, kasutades elus/surnud värvimiskomplekti, mis sisaldas fluorestseiindiatsetaati (5 mg ml).-1 atsetoonis) ja propiidiumjodiidi (1 mg ml-1 PBS-is). Mitme kanaliga fluorestsentskujutised tehti fluorestsentsmikroskoopia abil (Cell Observer, Carl Zeiss Microscopy) ergastuse all lainepikkusel 470 nm elusrakkude puhul (emissiooni lainepikkus 530 nm) ja 540 nm surnud rakkude puhul (emissiooni lainepikkus 618 nm). Pärast 72-tunnist inkubeerimist trüpsiiniti ülejäänud 12 rakku, värviti ja loendati fluorestsentsmikroskoobi all. Rakkude elujõulisus arvutati elusrakkude arvu (roheline) ja rakkude koguarvu suhtena.
Statistika ja reprodutseeritavus
Valimi suuruse eelmääramiseks ei kasutatud statistilist meetodit. Analüüsidest ei jäetud välja andmeid. Rakud ja valmistatud proovid määrati enne operatsiooni juhuslikult vastavatesse rühmadesse. Uurijad ei olnud katsete ja tulemuste hindamise ajal jaotamise suhtes pimestatud.
Aruande kokkuvõte
Lisateave uurimistöö kavandamise kohta on kättesaadav Loodusportfelli aruandluse kokkuvõte lingitud selle artikliga.
- SEO-põhise sisu ja PR-levi. Võimenduge juba täna.
- PlatoData.Network Vertikaalne generatiivne Ai. Jõustage ennast. Juurdepääs siia.
- PlatoAiStream. Web3 luure. Täiustatud teadmised. Juurdepääs siia.
- PlatoESG. Süsinik, CleanTech, Energia, Keskkond päikeseenergia, Jäätmekäitluse. Juurdepääs siia.
- PlatoTervis. Biotehnoloogia ja kliiniliste uuringute luureandmed. Juurdepääs siia.
- Allikas: https://www.nature.com/articles/s41565-023-01567-0
- :on
- :mitte
- $ UP
- 1
- 10
- 100
- 12
- 15%
- 16
- 20
- 200
- 2010
- 2019
- 2020
- 22
- 23
- 24
- 25
- 28
- 30
- 35%
- 3d
- 40
- 49
- 51
- 52
- 53
- 54
- 600
- 7
- 70
- 72
- 8
- 80
- 9
- 98
- a
- MEIST
- üle
- Vastavalt
- täpsus
- Saavutada
- omandatud
- tegevus
- lisatud
- Täiendavad lisad
- Kohandatud
- ebasoodne
- pärast
- jälle
- AL
- viia
- joondatud
- joondamine
- Materjal: BPA ja flataatide vaba plastik
- eraldamine
- mööda
- alati
- am
- an
- analüüsid
- analüüs
- analüüsitud
- Ankur
- ja
- Teine
- mistahes
- rakendatud
- Rakendades
- umbes
- OLEME
- PIIRKOND
- ümber
- Array
- artikkel
- AS
- hinnata
- hindamine
- määratud
- At
- kinnitage
- saadaval
- vältima
- vältida
- TELGED
- Telg
- Tasakaalustatud
- baar
- põhineb
- BE
- sai
- enne
- vahel
- löök
- asutused
- Murdma
- lühidalt
- by
- arvutatud
- CAN
- ei saa
- lüüa
- pildistatud
- Carl
- juhul
- rakk
- Rakke
- kindel
- kamber
- muutma
- muutunud
- muutuv
- iseloomustatud
- kemikaalide
- klassika
- klõps
- Sulgemine
- Cluster
- kood
- kaubandus-
- võrreldav
- keeruline
- komponent
- komponendid
- kontsentratsioon
- sisaldab
- pidevalt
- kontrast
- kontrollida
- kontrollitud
- kontroll
- koordineerima
- koordineeritud
- Parandatud
- võiks
- KOVALENTNE
- kriitiline
- kultuur
- kõver
- tsükkel
- andmed
- surnud
- määratlema
- Kraad
- Nõudlus
- Tihedus
- Disain
- projekteerimine
- Vaatamata
- detailid
- Detection
- kindlaksmääratud
- arenenud
- & Tarkvaraarendus
- seade
- erinev
- mõõdud
- otsene
- suund
- suunad
- otse
- Puudus
- laiali
- veeväljasurve
- tehtud
- kahekordistada
- sõidu
- langes
- kuivati
- kestus
- ajal
- e
- E&T
- iga
- lihtne
- ed
- tõhus
- tõhusalt
- element
- emissioon
- võimaldades
- suurendama
- keskkond
- ensümaatiline
- Eeter (ETH)
- näide
- Välja arvatud
- välja jäetud
- eksperiment
- eksperimentaalne
- katseid
- Säritus
- pikendatud
- väline
- Fe
- väli
- Valdkonnad
- Viigipuu
- Joonis
- täidetud
- lõplik
- Lõpuks
- esimene
- paigaldamine
- vedelik
- FLUX
- Järel
- eest
- Sundida
- relvajõud
- moodustatud
- avastatud
- Alates
- täielikult
- funktsioon
- funktsioonid
- edasi
- Pealegi
- Kasum
- tekitama
- loodud
- teeniva
- geomeetria
- antud
- andmine
- klaas
- järk-järgult
- Green
- Grupp
- Grupi omad
- suunata
- juhitud
- olnud
- Pool
- aitama
- omanik
- HTTPS
- IEEE
- pildid
- mõju
- rakendada
- rakendatud
- in
- INKUBATSIOONI
- osutatud
- Indikaator
- mõju
- info
- esialgne
- sees
- integreeritud
- sekkumine
- sisse
- Uurijad
- ITS
- hoitakse
- komplekt
- laser
- kihid
- lahkus
- Pikkus
- elu
- valgus
- liinid
- LINK
- seotud
- elama
- koormus
- saadetised
- kohalik
- Madal
- Magnetväli
- tegema
- manipuleerimine
- Manipuleerimine
- viis
- märgitud
- materjal
- materjalid
- mõõtma
- mõõdetud
- mõõtmine
- mõõdud
- mehaaniline
- mehaanika
- Meedia
- keskmine
- metall
- meetod
- micro
- Mikroskoobi
- Mikroskoopia
- minutit
- segatud
- Segamine
- segu
- ML
- mudel
- modelleerimine
- modifitseeritud
- moodul
- rohkem
- tõhusam
- kõige
- liikumine
- liikuma
- liikuv
- MT
- mitmekordne
- Nanotehnoloogia
- loodus
- vaja
- neto
- ei
- eelkõige
- number
- vaadeldud
- saama
- saadud
- of
- on
- Pardal
- kunagi
- ainult
- avatud
- avamine
- tegutses
- töö
- Operations
- or
- päritolu
- originaal
- Muu
- muidu
- välja
- Tulemus
- paari
- Parallel
- parameetrid
- osad
- PBS
- teostatud
- periood
- faas
- Pigi
- paigutatud
- lennuk
- Lennukid
- Platon
- Platoni andmete intelligentsus
- PlatoData
- Punkt
- portfell
- positsioon
- positsioone
- positiivne
- võimalik
- võim
- volitused
- ennustada
- valmis
- olemasolu
- esitatud
- varem
- protsess
- professionaalne
- Projektsioon
- omadused
- kinnisvara
- tõukejõu
- ostetud
- Kvant
- määr
- suhe
- salvestamine
- Taastub
- taastumine
- Red
- viide
- peetakse
- vabastama
- ülejäänud
- kaugelt
- kõrvaldama
- korduv
- asendatakse
- Teatatud
- Aruandlus
- esindama
- teadustöö
- suhtes
- need
- Tulemused
- õige
- jäik
- robot
- Rull
- Rolling
- ruum
- s
- sama
- SCI
- Teine
- lõigud
- vaata
- Vaata detaile
- otsima
- segment
- andur
- Jada
- Seerum
- komplekt
- kuju
- kuju
- Lühike
- peaks
- näidatud
- Näitused
- lihtsustatud
- lihtsustamine
- lihtsalt
- simuleerimine
- samaaegselt
- SUURUS
- Aeglaselt
- väike
- So
- naatrium
- Pehme
- tarkvara
- lahendus
- lahendatud
- eriline
- konkreetse
- eriti
- määratletud
- spekter
- kiirus
- sperma
- statistiline
- Strateegia
- struktuuriline
- struktuur
- Järgnevalt
- vastuvõtlikkus
- ujumine
- süsteem
- võtnud
- sihtmärk
- terminal
- tekst
- et
- .
- SIIS
- Need
- Theta
- see
- kolm
- puuk
- aeg
- korda
- et
- Summa
- suunas
- trajektoor
- trans
- transportida
- püünisjahi
- töödeldud
- Kaks korda
- kaks
- Ultraheli-
- all
- Universaalne
- kasutama
- Kasutatud
- kasutamine
- kinnitatud
- elujõulisus
- Videod
- maht
- oli
- pesemine
- Vesi
- Tee..
- we
- Hästi
- Wells
- olid
- millal
- mis
- kuigi
- kogu
- koos
- ilma
- kirjutamine
- sephyrnet
- null