HELSINKI – El módulo de aterrizaje SLIM de Japón logró su objetivo de un alunizaje preciso con solo uno de los dos propulsores principales en funcionamiento, afirmó JAXA el jueves, mientras que un pequeño rover devolvió una imagen de la nave espacial.
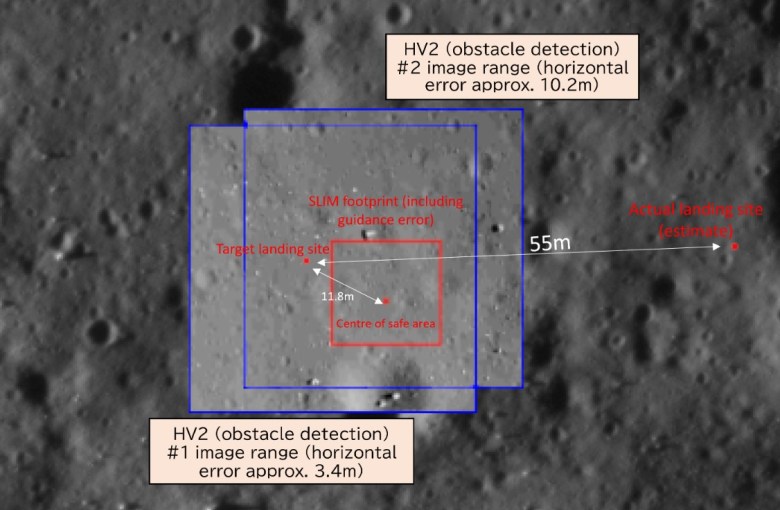
SLIM realizó un aterrizaje preciso en 25.24889 Este, 13.31549 Sur en la ladera del cráter Shioli, a 55 metros del punto objetivo, dijo Shinichiro Sakai, gerente de proyecto del equipo SLIM en JAXA, durante una conferencia de prensa la madrugada del jueves (25 de enero), cumpliendo un criterio clave de la misión.
La agencia pretendía un aterrizaje de alta precisión, definido como un aterrizaje dentro de los 100 metros del punto objetivo.
SLIM hizo su alunizaje histórico el 19 de enero, y también lanzó con éxito un par de pequeños rovers a la superficie justo antes del aterrizaje. El aterrizaje de SLIM convirtió a Japón en el quinto país en aterrizar en la Luna, pero problemas con la generación de energía hicieron que el tiempo activo de la nave espacial en la superficie fuera acortar. Sin embargo, queda la esperanza de que SLIM pueda reactivarse antes de fin de mes.
Sin embargo, Sakai reveló que uno de los dos propulsores principales probablemente falló durante la fase final de aterrizaje. Esto tuvo lugar desde una altitud de 50 metros hasta el aterrizaje, lo que provocó un movimiento lateral involuntario en la parte superior.
“En estas circunstancias, el software de a bordo SLIM identifica de forma autónoma la anomalía y, mientras controla al máximo la posición horizontal, SLIM continúa el descenso con el otro motor y avanza gradualmente hacia el este”.
El aterrizaje SLIM estaba previsto que se produjera en dos pasos. Primero con los propulsores de aterrizaje abajo, luego un propulsor más pequeño encendiéndose para inclinar la nave espacial hacia un lado. Luego, SLIM está amortiguado por cinco patas de aterrizaje de celosía de aluminio impresas en 3D y aplastables.
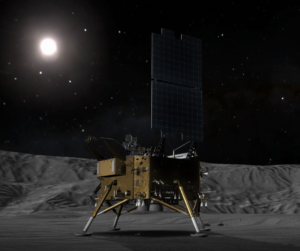
Una imagen de SLIM tomada por uno de los rovers, Transformable Lunar Robot LEV-2, revela que la nave espacial está en la superficie lunar con su propulsor apuntando hacia arriba. Se está investigando la causa del aparente mal funcionamiento del motor.
La actitud de aterrizaje significó que el panel solar de SLIM esté orientado hacia el oeste, lo que inicialmente no recibió luz solar. Sin embargo, JAXA afirma que existe la posibilidad de que las células solares puedan generar electricidad durante la noche lunar a medida que mejora la iluminación.
"Aunque inicialmente se esperaba que las actividades de SLIM en la Luna duraran sólo unos días, continuarán los preparativos necesarios para la recuperación con el fin de adquirir más datos técnicos y científicos", afirma un ambiental leer.
La situación recuerda a la del módulo de aterrizaje Philae como parte de la misión europea Rosetta. Philae rebotó cuando intentó aterrizar en el cometa 67P en 2014. También sufrió problemas con la iluminación antes de volver a despertar brevemente.
JAXA declaró anteriormente que SLIM desconectó su batería al 12%, como estaba previsto, para evitar una descarga excesiva. SLIM se apagó a las 12:57 pm hora del este (1757 UTC) del 19 de enero, sólo dos horas y media después de aterrizar a las 10:20 am hora del este (1520 UTC).
La cámara espectroscópica multibanda (MBC) montada en SLIM pudo funcionar a modo de prueba y capturar imágenes antes de que se desconectara la alimentación. JAXA publicado una imagen MBC creada mediante la síntesis de 257 imágenes monocromáticas de baja resolución. MBC se pondrá en acción si SLIM puede reactivarse.
"Se están realizando preparativos para realizar rápidamente observaciones espectroscópicas de alta resolución de 10 bandas una vez que las condiciones de iluminación solar mejoren y SLIM se recupere gracias a la energía generada por el panel solar", afirmó JAXA.
El pequeño vehículo de excursión lunar (LEV-2.1), de 1 kilogramos, realizó con éxito actividades en la superficie lunar, incluidos los movimientos de salto planificados. LEV-1 logró comunicación directa con estaciones terrestres, incluida una transmisión de datos de ondas de radio de prueba entre robots desde LEV-2. La adquisición de imágenes por LEV-1 no ha sido confirmada hasta el momento, según JAXA.
LEV-1 está en estado de espera en la superficie lunar. "Si bien la capacidad de reanudar la actividad depende de la generación de energía solar a partir de cambios en la dirección del sol, se mantendrán los esfuerzos para continuar recibiendo señales del LEV-1", dijo JAXA.
El rover LEV-0.25, del tamaño de una pelota de béisbol y de 2 kg, apodado SORA-Q, fue conducido sobre la superficie lunar y fotografiado SLIM. "Actualmente estamos analizando otros datos, incluidos los registros de conducción, y planeamos publicar los resultados en el futuro", señaló JAXA en un ambiental en el vehículo de superficie.
LEV-2 fue desarrollado conjuntamente por JAXA, Tomy, Sony y la Universidad de Doshisha. Es el vehículo lunar más pequeño y ligero jamás creado, según JAXA.
"El LEV-2 "SORA-Q", que fue desarrollado combinando tecnología de juguetes, la última tecnología de sensores robóticos y la tecnología espacial de JAXA, y tiene excelentes características de operación y movimiento autónomo", dijo el director del Centro de Innovación de Exploración Espacial de JAXA, Kazuyuki Funaki.
Se espera que la puesta de sol sobre el cráter Shioli se produzca a principios de UTC del 31 de enero. Ni SLIM ni sus rovers llevan unidades calentadoras de radioisótopos. Por lo tanto, no se espera que sobrevivan a la noche lunar, cuando las temperaturas bajarán a alrededor de -130 grados Celsius.
- Distribución de relaciones públicas y contenido potenciado por SEO. Consiga amplificado hoy.
- PlatoData.Network Vertical Generativo Ai. Empodérate. Accede Aquí.
- PlatoAiStream. Inteligencia Web3. Conocimiento amplificado. Accede Aquí.
- PlatoESG. Carbón, tecnología limpia, Energía, Ambiente, Solar, Gestión de residuos. Accede Aquí.
- PlatoSalud. Inteligencia en Biotecnología y Ensayos Clínicos. Accede Aquí.
- Fuente: https://spacenews.com/japans-slim-achieved-pinpoint-moon-landing-with-just-one-working-engine/
- :posee
- :es
- :no
- ][pag
- 1
- 10
- 100
- 12
- 13
- 130
- 19
- 20
- 2014
- 25
- 31
- 50
- a
- Poder
- arriba
- Conforme
- preciso
- alcanzado
- adquirir
- adquirido
- adquisición
- la columna Acción
- lector activo
- actividades
- actividad
- Después
- Dirigido
- también
- an
- el análisis de
- y
- aparente
- somos
- en torno a
- Formación
- AS
- At
- intento
- actitud
- autónomo
- autónomamente
- base
- agresión con lesiones
- BE
- esto
- antes
- "Ser"
- brevemente
- pero
- by
- cámara
- PUEDEN
- capacidad
- capturar
- capturado
- llevar
- Causar
- Células
- Celsius
- Cambios
- características
- circunstancias
- combinar
- Comunicación
- condición
- Conducir
- llevado a cabo
- Congreso
- Confirmado
- continue
- continuado
- CONTROL
- país
- creado
- En la actualidad
- acolchado
- datos
- Días
- se define
- desarrollado
- de reservas
- dirección
- Director
- desconectado
- DE INSCRIPCIÓN
- impulsados
- conducción
- Soltar
- durante
- Temprano en la
- Este
- oriental
- esfuerzos
- electricidad
- final
- Motor
- Europas
- tarde
- NUNCA
- excelente,
- ejecutado
- existe
- esperado
- exploración
- tener problemas con
- Fallidos
- pocos
- quinto
- final
- disparo
- Nombre
- Digital XNUMXk
- Desde
- el cumplimiento de
- promover
- futuras
- generar
- generado
- generación de AHSS
- objetivo
- gradualmente
- Polo a Tierra
- A Mitad
- de alta resolución
- esperanza
- Horizontal
- HORAS
- Sin embargo
- HTML
- HTTPS
- Bujes
- identifica
- if
- imagen
- imágenes
- mejora
- in
- Incluye
- Indian
- posiblemente
- Innovation
- Destinado a
- dentro
- cuestiones
- IT
- SUS
- Ene
- Japón
- Japón
- jpg
- solo
- tan siquiera solo una
- Clave
- CARGA TERRESTRE
- aterrizaje
- Apellido
- más reciente
- piernas
- que otros
- Lunar
- hecho
- Inicio
- Realizar
- gerente
- max-ancho
- MBC
- significó
- misión
- monocromo
- Mes
- luna
- movimiento
- emocionado
- movimientos
- mucho más
- Navegación
- necesario
- Neither
- ni
- señaló
- ahora
- observaciones
- ocurrir
- of
- off
- on
- A bordo
- una vez
- ONE
- , solamente
- funcionar
- funcionamiento
- Inteligente
- solicite
- originalmente
- Otro
- Más de
- par
- parte
- fase
- Fotos
- Colocar
- plan
- planificado
- Platón
- Inteligencia de datos de Platón
- PlatónDatos
- punto
- posición
- posibilidad
- posible
- industria
- alimentado
- necesidad
- prensa
- evitar
- previamente
- problemas
- proyecto
- publicar
- poner
- Radio
- aprovecha
- Recupera
- recuperación
- la liberación de
- permanece
- recordativo
- resultante
- Resultados
- currículum
- Revelado
- Revela
- robot
- robótica
- rover
- Said
- científico
- sensor
- lado
- señales
- situación
- Pendiente
- chica
- menores
- Software
- solar
- Células solares
- Energía Solar
- Sony
- Sur
- Espacio
- exploración espacial
- astronave
- Estado
- dijo
- Zonas
- estaciones
- pasos
- Con éxito
- Dom
- luz del sol
- Superficie
- sobrevivir
- toma
- Target
- equipo
- Técnico
- Tecnología
- test
- esa
- El
- El futuro de las
- luego
- Ahí.
- Estas
- ellos
- así
- jueves
- Así
- equipo
- de estilista
- a
- se
- hacia
- juguete
- juicio
- Convertido
- dos
- En curso
- unidades que
- universidad
- hacia arriba
- UTC
- vehículo
- fue
- Trenzado
- tuvieron
- cuando
- que
- mientras
- seguirá
- dentro de
- trabajando
- zephyrnet