29. Mai 2023 (Nanowerk-Neuigkeiten) Forscher der Abteilung für Maschinenbau und Bioingenieurwesen der Universität Osaka haben einen neuen Laufrobotertyp erfunden, der sich dynamische Instabilität zum Navigieren zunutze macht. Durch Ändern der Flexibilität der Kupplungen kann der Roboter zum Drehen gebracht werden, ohne dass komplexe rechnerische Steuerungssysteme erforderlich sind. Diese Arbeit kann zur Entwicklung von Rettungsrobotern beitragen, die in der Lage sind, unebenes Gelände zu überwinden. Die meisten Tiere auf der Erde haben ein robustes Fortbewegungssystem mit Beinen entwickelt, das ihnen in einer Vielzahl von Umgebungen ein hohes Maß an Mobilität ermöglicht. Etwas enttäuschend ist, dass Ingenieure, die versucht haben, diesen Ansatz zu reproduzieren, oft festgestellt haben, dass Roboter mit Beinen überraschend zerbrechlich sind. Der Ausfall auch nur eines Beins aufgrund der wiederholten Belastung kann die Funktionsfähigkeit dieser Roboter erheblich einschränken. Darüber hinaus erfordert die Steuerung einer großen Anzahl von Gelenken, damit der Roboter komplexe Umgebungen durchqueren kann, viel Computerleistung. Verbesserungen dieses Designs wären äußerst nützlich für den Bau autonomer oder halbautonomer Roboter, die als Erkundungs- oder Rettungsfahrzeuge fungieren und gefährliche Bereiche betreten könnten.
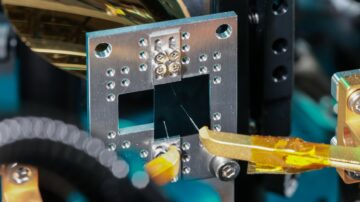
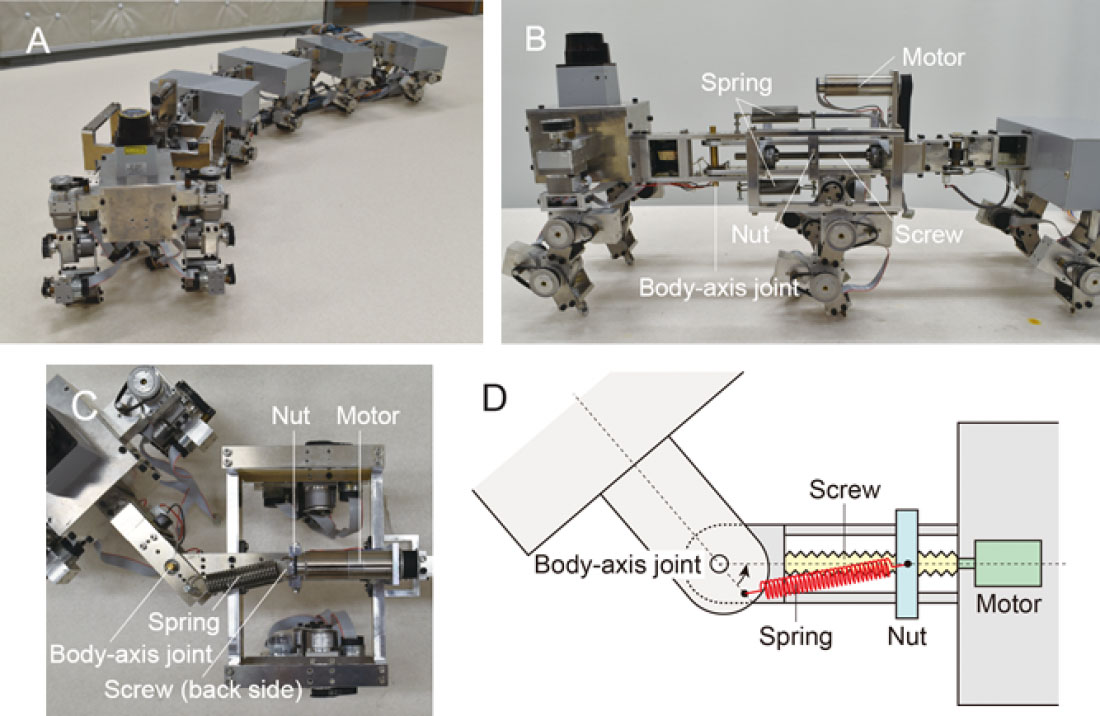 Myriapod-Roboter (A) und variabler Körperachsenflexibilitätsmechanismus (B. Vorderansicht, C. Draufsicht, D. Schematische Darstellung der Draufsicht). (Bild: CC BY-NC, 2023, Aoi et al., Soft Robotics) Nun haben Forscher der Universität Osaka einen biomimetischen „Myriapod“-Roboter entwickelt, der sich eine natürliche Instabilität zunutze macht, die gerades Gehen in gekrümmte Bewegungen umwandeln kann. In einer kürzlich veröffentlichten Studie in Weiche Robotik (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”) beschreiben Forscher der Universität Osaka ihren Roboter, der aus sechs Segmenten (mit jeweils zwei Beinen verbunden) und flexiblen Gelenken besteht. Über eine Stellschraube lässt sich die Flexibilität der Kupplungen während der Gehbewegung motorisch verändern. Die Forscher zeigten, dass eine zunehmende Flexibilität der Gelenke zu einer Situation namens „Heugabelgabelung“ führte, bei der das gerade Gehen instabil wird. Stattdessen geht der Roboter dazu über, in einem gekrümmten Muster zu gehen, entweder nach rechts oder nach links. Normalerweise würden Ingenieure versuchen, die Entstehung von Instabilitäten zu vermeiden. Ihr kontrollierter Einsatz kann jedoch eine effiziente Manövrierfähigkeit ermöglichen. „Wir wurden von der Fähigkeit bestimmter extrem agiler Insekten inspiriert, die dynamische Instabilität ihrer eigenen Bewegung zu kontrollieren und schnelle Bewegungsänderungen herbeizuführen“, sagt Shinya Aoi, eine Autorin der Studie. Da dieser Ansatz nicht direkt die Bewegung der Körperachse steuert, sondern vielmehr die Flexibilität steuert, kann er sowohl den Rechenaufwand als auch den Energiebedarf erheblich reduzieren.
Myriapod-Roboter (A) und variabler Körperachsenflexibilitätsmechanismus (B. Vorderansicht, C. Draufsicht, D. Schematische Darstellung der Draufsicht). (Bild: CC BY-NC, 2023, Aoi et al., Soft Robotics) Nun haben Forscher der Universität Osaka einen biomimetischen „Myriapod“-Roboter entwickelt, der sich eine natürliche Instabilität zunutze macht, die gerades Gehen in gekrümmte Bewegungen umwandeln kann. In einer kürzlich veröffentlichten Studie in Weiche Robotik (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”) beschreiben Forscher der Universität Osaka ihren Roboter, der aus sechs Segmenten (mit jeweils zwei Beinen verbunden) und flexiblen Gelenken besteht. Über eine Stellschraube lässt sich die Flexibilität der Kupplungen während der Gehbewegung motorisch verändern. Die Forscher zeigten, dass eine zunehmende Flexibilität der Gelenke zu einer Situation namens „Heugabelgabelung“ führte, bei der das gerade Gehen instabil wird. Stattdessen geht der Roboter dazu über, in einem gekrümmten Muster zu gehen, entweder nach rechts oder nach links. Normalerweise würden Ingenieure versuchen, die Entstehung von Instabilitäten zu vermeiden. Ihr kontrollierter Einsatz kann jedoch eine effiziente Manövrierfähigkeit ermöglichen. „Wir wurden von der Fähigkeit bestimmter extrem agiler Insekten inspiriert, die dynamische Instabilität ihrer eigenen Bewegung zu kontrollieren und schnelle Bewegungsänderungen herbeizuführen“, sagt Shinya Aoi, eine Autorin der Studie. Da dieser Ansatz nicht direkt die Bewegung der Körperachse steuert, sondern vielmehr die Flexibilität steuert, kann er sowohl den Rechenaufwand als auch den Energiebedarf erheblich reduzieren.
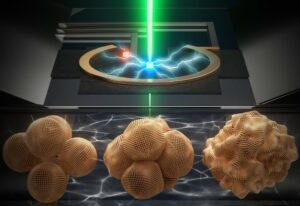
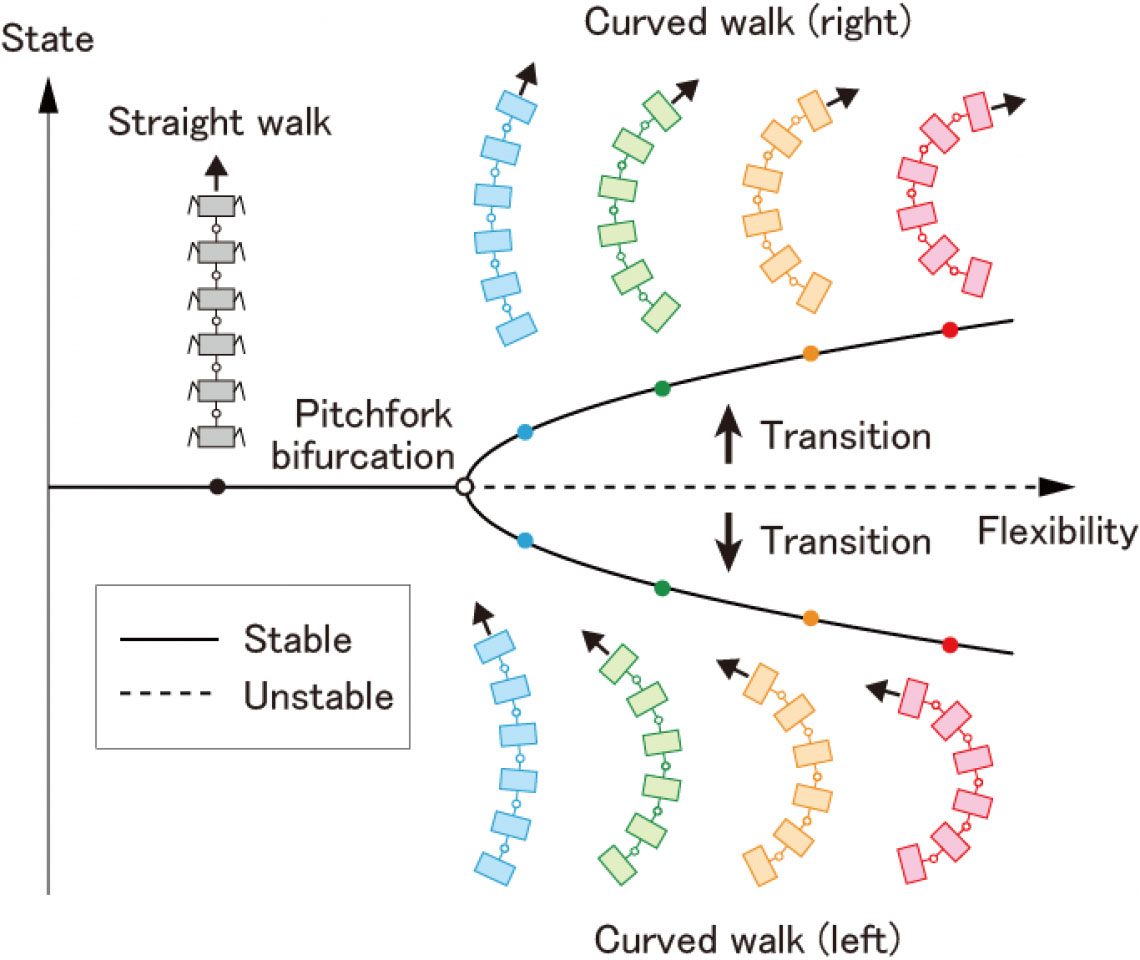 Stabile und instabile Gangmuster abhängig von der Flexibilität der Körperachse. (Bild: CC BY-NC, 2023, Aoi et al., Soft Robotics) Das Team testete die Fähigkeit des Roboters, bestimmte Orte zu erreichen, und stellte fest, dass er navigieren konnte, indem er gekrümmte Pfade zu Zielen nahm. „Wir können Anwendungen in einer Vielzahl von Szenarien vorhersehen, etwa bei der Suche und Rettung, beim Arbeiten in gefährlichen Umgebungen oder bei der Erkundung anderer Planeten“, sagt Mau Adachi, ein weiterer Studienautor. Zukünftige Versionen können zusätzliche Segmente und Kontrollmechanismen enthalten.
Stabile und instabile Gangmuster abhängig von der Flexibilität der Körperachse. (Bild: CC BY-NC, 2023, Aoi et al., Soft Robotics) Das Team testete die Fähigkeit des Roboters, bestimmte Orte zu erreichen, und stellte fest, dass er navigieren konnte, indem er gekrümmte Pfade zu Zielen nahm. „Wir können Anwendungen in einer Vielzahl von Szenarien vorhersehen, etwa bei der Suche und Rettung, beim Arbeiten in gefährlichen Umgebungen oder bei der Erkundung anderer Planeten“, sagt Mau Adachi, ein weiterer Studienautor. Zukünftige Versionen können zusätzliche Segmente und Kontrollmechanismen enthalten.
Myriapod-Roboter (A) und variabler Körperachsenflexibilitätsmechanismus (B. Vorderansicht, C. Draufsicht, D. Schematische Darstellung der Draufsicht). (Bild: CC BY-NC, 2023, Aoi et al., Soft Robotics) Nun haben Forscher der Universität Osaka einen biomimetischen „Myriapod“-Roboter entwickelt, der sich eine natürliche Instabilität zunutze macht, die gerades Gehen in gekrümmte Bewegungen umwandeln kann. In einer kürzlich veröffentlichten Studie in Weiche Robotik (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”) beschreiben Forscher der Universität Osaka ihren Roboter, der aus sechs Segmenten (mit jeweils zwei Beinen verbunden) und flexiblen Gelenken besteht. Über eine Stellschraube lässt sich die Flexibilität der Kupplungen während der Gehbewegung motorisch verändern. Die Forscher zeigten, dass eine zunehmende Flexibilität der Gelenke zu einer Situation namens „Heugabelgabelung“ führte, bei der das gerade Gehen instabil wird. Stattdessen geht der Roboter dazu über, in einem gekrümmten Muster zu gehen, entweder nach rechts oder nach links. Normalerweise würden Ingenieure versuchen, die Entstehung von Instabilitäten zu vermeiden. Ihr kontrollierter Einsatz kann jedoch eine effiziente Manövrierfähigkeit ermöglichen. „Wir wurden von der Fähigkeit bestimmter extrem agiler Insekten inspiriert, die dynamische Instabilität ihrer eigenen Bewegung zu kontrollieren und schnelle Bewegungsänderungen herbeizuführen“, sagt Shinya Aoi, eine Autorin der Studie. Da dieser Ansatz nicht direkt die Bewegung der Körperachse steuert, sondern vielmehr die Flexibilität steuert, kann er sowohl den Rechenaufwand als auch den Energiebedarf erheblich reduzieren.
Stabile und instabile Gangmuster abhängig von der Flexibilität der Körperachse. (Bild: CC BY-NC, 2023, Aoi et al., Soft Robotics) Das Team testete die Fähigkeit des Roboters, bestimmte Orte zu erreichen, und stellte fest, dass er navigieren konnte, indem er gekrümmte Pfade zu Zielen nahm. „Wir können Anwendungen in einer Vielzahl von Szenarien vorhersehen, etwa bei der Suche und Rettung, beim Arbeiten in gefährlichen Umgebungen oder bei der Erkundung anderer Planeten“, sagt Mau Adachi, ein weiterer Studienautor. Zukünftige Versionen können zusätzliche Segmente und Kontrollmechanismen enthalten.
- SEO-gestützte Content- und PR-Distribution. Holen Sie sich noch heute Verstärkung.
- PlatoAiStream. Web3-Datenintelligenz. Wissen verstärkt. Hier zugreifen.
- Die Zukunft prägen mit Adryenn Ashley. Hier zugreifen.
- Kaufen und verkaufen Sie Anteile an PRE-IPO-Unternehmen mit PREIPO®. Hier zugreifen.
- Quelle: https://www.nanowerk.com/news2/robotics/newsid=63068.php
- :nicht
- 10
- 2022
- 2023
- 7
- 8
- 9
- a
- Fähigkeit
- Fähig
- Handlung
- Zusatz
- Zusätzliche
- einstellbar
- Vorteil
- agil
- AL
- erlaubt
- an
- und
- Tiere
- Ein anderer
- Anwendungen
- Ansatz
- SIND
- Bereiche
- AS
- helfen
- At
- Versuche
- Autor
- Autonom
- vermeiden
- Achse
- BE
- weil
- wird
- Körper
- beide
- Breakdown
- Building
- aber
- by
- namens
- CAN
- Center
- sicher
- Änderungen
- Ändern
- Komplex
- Komplexität
- Computer
- Computerleistung
- Sie
- Smartgeräte App
- gesteuert
- Regelung
- Steuerung
- verkaufen
- könnte
- Erstellen
- Schaffung
- Gefährlich
- Datum
- Grad
- Abteilung
- Abhängig
- beschreiben
- Design
- entwickelt
- Direkt
- die
- zwei
- im
- dynamisch
- E & T
- jeder
- Erde
- effizient
- entweder
- ermöglichen
- Energie
- Ingenieure
- Enter
- Umgebungen
- Sogar
- entwickelt
- Exploration
- äußerst
- Flexibilität
- flexibel
- Aussichten für
- gefunden
- für
- Materials des
- Funktion
- Zukunft
- Go
- sehr
- Haben
- High
- aber
- HTTPS
- Image
- Verbesserungen
- in
- das
- zunehmend
- inspirierte
- Instabilität
- beantragen müssen
- in
- Erfunden
- Die Ermittler
- IT
- jpg
- Art
- grosse
- geführt
- links
- Beine
- LIMIT
- Standorte
- Los
- gemacht
- Making
- Kann..
- mechanisch
- Mechanismus
- Mechanismen
- Mitte
- Mobilität
- geändert
- vor allem warme
- Bewegung
- Motoren
- Bewegung
- Natürliche
- Navigieren
- Need
- Neu
- Normalerweise
- jetzt an
- Anzahl
- of
- vorgenommen,
- on
- EINEM
- or
- Andere
- übrig
- besitzen
- Schnittmuster
- Muster
- Planets
- Plato
- Datenintelligenz von Plato
- PlatoData
- Werkzeuge
- bietet
- veröffentlicht
- Direkt
- Angebot
- lieber
- erreichen
- kürzlich
- Veteran
- wiederholt
- Voraussetzungen:
- erfordert
- retten
- Forscher
- Recht
- Roboter
- Robotik
- Roboter
- robust
- sagt
- Szenarien
- Wissenschaft
- Suche
- Segment
- Segmente
- stark
- zeigte
- Situation
- SIX
- So
- SOFT
- etwas
- spezifisch
- stabil
- mit Stiel
- Der Stress
- Studie
- so
- System
- Systeme und Techniken
- nimmt
- Einnahme
- Ziele
- Team
- zur Verbesserung der Gesundheitsgerechtigkeit
- Das
- ihr
- Sie
- Diese
- fehlen uns die Worte.
- zu
- Top
- gegenüber
- Übergänge
- versuchen
- WENDE
- XNUMX
- Universität
- -
- Verwendung von
- Vielfalt
- Fahrzeuge
- Anzeigen
- Gehen
- GUT
- waren
- welche
- WHO
- breit
- Große Auswahl
- mit
- ohne
- Arbeiten
- arbeiten,
- würde
- Zephyrnet
Mehr von Nanowerk


Origami-basierte Integration von Robotern, die wahrnehmen, entscheiden und reagieren
Quellknoten: 2565107
Zeitstempel: 4. April 2023
Zwei-/quasi-zweidimensionale Perowskit-basierte Heterostrukturen: Konstruktion, Eigenschaften und Anwendungen
Quellknoten: 1938788
Zeitstempel: 3. Februar 2023

Forscher beschreiben nie zuvor gesehene Eigenschaften in einer Familie von supraleitenden Kagome-Metallen
Quellknoten: 1952937
Zeitstempel: 11. Februar 2023
Integrierte photonische Schaltkreise könnten helfen, die „Terahertz-Lücke“ zu schließen
Quellknoten: 1899339
Zeitstempel: Jan 14, 2023

Die CO80-Emissionen aus Düngemitteln könnten bis 2050 um bis zu XNUMX % reduziert werden
Quellknoten: 1951214
Zeitstempel: 11. Februar 2023
Neuartige Ferroelektrika für effizientere Mikroelektronik
Quellknoten: 2716345
Zeitstempel: 9. Juni 2023
Wie ein rekordverdächtiger Kupfer-Nanokatalysator CO2 in flüssige Kraftstoffe umwandelt
Quellknoten: 1961058
Zeitstempel: 16. Februar 2023
Forscher drucken funktionsfähiges menschliches Gehirngewebe in 3D
Quellknoten: 3093799
Zeitstempel: 2. Februar 2024
Entwicklung von Technologien zur Reduzierung der Kosten für die Produktion von grünem Wasserstoff
Quellknoten: 2700260
Zeitstempel: 2. Juni 2023
Entschlüsseln Sie die Geheimnisse des Spins mit hochharmonischen Sonden
Quellknoten: 2969974
Zeitstempel: 10. Nov 2023