03. Mai 2023 (Nanowerk-Neuigkeiten) Seit der Einführung des Begriffs „Soft Robotics“ im Jahr 2008 haben Ingenieure auf diesem Gebiet verschiedene Darstellungen flexibler Maschinen gebaut, die für die Erforschung, Fortbewegung, Rehabilitation und sogar den Weltraum nützlich sind. Eine Inspirationsquelle: die Art und Weise, wie sich Tiere in der Wildnis bewegen. Ein Team von MIT-Forschern ist noch einen Schritt weitergegangen und hat es weiterentwickelt SoftZoo, eine bioinspirierte Plattform, die es Ingenieuren ermöglicht, das Co-Design weicher Roboter zu untersuchen. Das Framework optimiert Algorithmen, die aus Design bestehen, das bestimmt, wie der Roboter aussehen wird; und Steuerung oder das System, das Roboterbewegungen ermöglicht und die Art und Weise verbessert, wie Benutzer automatisch Umrisse für potenzielle Maschinen erstellen.
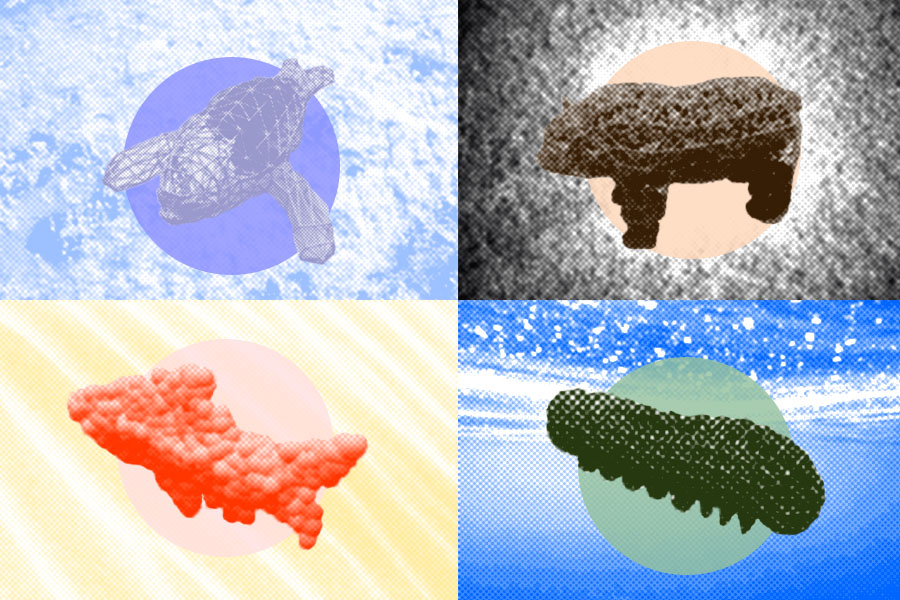 Die Forscher entwickelten ein System für das Soft-Roboter-Co-Design, das heißt, sie suchen gemeinsam nach dem Roboterdesign und optimieren es: die Form des Roboters, die Stelle, an der Muskeln im Roboterkörper platziert werden sollen, wie weich der Roboter in verschiedenen Körperregionen ist; und basierend auf dem Roboterdesign die Art und Weise, ihn zu steuern, um eine Zielaufgabe zu erfüllen. (Bild: Alex Shipps/MIT CSAIL und die Forscher) Die Plattform macht einen Spaziergang auf der wilden Seite und bietet 3D-Modelle von Tieren wie Pandabären, Fischen, Haien und Raupen als Designs, die sanfte Roboteraufgaben wie Fortbewegung simulieren können , agiles Drehen und Pfadverfolgung in verschiedenen Umgebungen. Ob Schnee, Wüste, Lehm oder Wasser, die Plattform demonstriert die Leistungskompromisse verschiedener Designs in unterschiedlichem Gelände.
„Unser Framework kann Benutzern helfen, die beste Konfiguration für die Form eines Roboters zu finden, und es ihnen ermöglichen, Soft-Robotik-Algorithmen zu entwerfen, die viele verschiedene Dinge tun können“, sagt MIT-Doktorand Tsun-Hsuan Wang, ein Partner des Computer Science and Artificial Intelligence Laboratory ( CSAIL), der leitender Forscher des Projekts ist. „Im Wesentlichen hilft es uns, die besten Strategien für Roboter zur Interaktion mit ihrer Umgebung zu verstehen.“ SoftZoo ist umfassender als ähnliche Plattformen, die bereits Design und Steuerung simulieren, da es Bewegungen modelliert, die auf die physikalischen Merkmale verschiedener Biome reagieren. Die Vielseitigkeit des Frameworks beruht auf einer differenzierbaren Multiphysik-Engine, die die gleichzeitige Simulation mehrerer Aspekte eines physikalischen Systems ermöglicht, beispielsweise einer Babyrobbe, die sich auf Eis dreht, oder einer Raupe, die sich zentimeterweise durch ein Feuchtgebiet bewegt. Die Differenzierbarkeit der Engine optimiert das Co-Design, indem die Anzahl der oft teuren Simulationen reduziert wird, die zur Lösung rechnerischer Steuerungs- und Designprobleme erforderlich sind. Dadurch können Benutzer Soft-Roboter mit ausgefeilteren, spezifizierten Algorithmen entwerfen und bewegen.
Die Fähigkeit des Systems, Interaktionen mit unterschiedlichem Gelände zu simulieren, verdeutlicht die Bedeutung der Morphologie, einem Zweig der Biologie, der die Formen, Größen und Gestalten verschiedener Organismen untersucht. Abhängig von der Umgebung sind einige biologische Strukturen optimaler als andere, ähnlich wie der Vergleich von Bauplänen für Maschinen, die ähnliche Aufgaben ausführen.
Diese biologischen Umrisse können zu spezialisierterem, geländespezifischem künstlichem Leben inspirieren. „Die sanft gewellte Geometrie einer Qualle ermöglicht es ihr, sich effizient über große Gewässer zu bewegen, was Forscher dazu inspiriert, neue Arten weicher Roboter zu entwickeln und unbegrenzte Möglichkeiten dessen zu eröffnen, wozu vollständig in silico gezüchtete künstliche Kreaturen fähig sein können“, sagt Wang. „Darüber hinaus können Libellen sehr agile Manöver ausführen, die andere fliegende Lebewesen nicht ausführen können, da sie spezielle Strukturen an ihren Flügeln haben, die beim Fliegen ihren Schwerpunkt verändern. Unsere Plattform optimiert die Fortbewegung auf die gleiche Weise, wie eine Libelle von Natur aus besser darin ist, sich durch ihre Umgebung zu bewegen.“ Früher hatten Roboter Schwierigkeiten, sich in unübersichtlichen Umgebungen zurechtzufinden, weil ihr Körper sich nicht an die Umgebung anpasste. Mit SoftZoo könnten Designer jedoch das Gehirn und den Körper des Roboters gleichzeitig entwickeln und dabei sowohl Land- als auch Wassermaschinen gemeinsam optimieren, um bewusster und spezialisierter zu sein. Mit erhöhter Verhaltens- und morphologischer Intelligenz wären die Roboter dann nützlicher bei der Durchführung von Rettungsmissionen und der Durchführung von Erkundungen. Wenn beispielsweise während einer Überschwemmung eine Person vermisst wird, könnte der Roboter möglicherweise effizienter durch die Gewässer reisen, da er mithilfe von Methoden optimiert wurde, die auf der SotftZoo-Plattform demonstriert wurden.
„SoftZoo bietet Open-Source-Simulationen für Soft-Roboter-Designer und hilft ihnen dabei, reale Roboter viel einfacher und flexibler zu bauen und gleichzeitig die Fortbewegungsfähigkeiten der Maschinen in verschiedenen Umgebungen zu beschleunigen“, fügt der Co-Autor der Studie, Chuang Gan, ein Forschungswissenschaftler am MIT, hinzu -IBM Watson AI Lab, der bald Assistenzprofessor an der University of Massachusetts in Amherst sein wird.
„Dieser rechnerische Ansatz zur gemeinsamen Gestaltung der weichen Roboterkörper und ihrer Gehirne (d. h. ihrer Steuerungen) öffnet die Tür zur schnellen Entwicklung maßgeschneiderter Maschinen, die für eine bestimmte Aufgabe entwickelt wurden“, fügt Daniela Rus, Direktorin von CSAIL und Andrew and, hinzu Erna Viterbi Professorin am MIT Department of Electrical Engineering and Computer Science (EECS), eine weitere Autorin der Arbeit.
Bevor irgendeine Art von Roboter konstruiert wird, könnte das Framework ein Ersatz für Feldtests unnatürlicher Szenen sein. Beispielsweise kann es für ein Forschungsteam, das in den städtischen Ebenen von Boston arbeitet, eine Herausforderung sein, zu beurteilen, wie sich ein bärenähnlicher Roboter in der Wüste verhält. Stattdessen könnten Soft-Robotik-Ingenieure 3D-Modelle in SoftZoo verwenden, um verschiedene Designs zu simulieren und zu bewerten, wie effektiv die Algorithmen zur Steuerung ihrer Roboter bei der Navigation sind. Dies wiederum würde den Forschern Zeit und Ressourcen sparen.
Dennoch stehen die Einschränkungen aktueller Fertigungstechniken der Verwirklichung dieser Soft-Roboter-Designs im Weg. „Der Übergang von der Simulation zum physischen Roboter bleibt ungelöst und erfordert weitere Untersuchungen“, sagt Wang. „Die Muskelmodelle, die räumlich variierende Steifheit und die Sensorisierung in SoftZoo können mit aktuellen Herstellungstechniken nicht einfach realisiert werden, daher arbeiten wir an diesen Herausforderungen.“ Zukünftig streben die Entwickler der Plattform Anwendungen in der menschlichen Mechanik an, beispielsweise in der Manipulation, da sie die Robotersteuerung testen kann. Um dieses Potenzial zu demonstrieren, entwarf Wangs Team einen dreidimensionalen Arm, der einen Schneeball nach vorne wirft.
Die Forscher entwickelten ein System für das Soft-Roboter-Co-Design, das heißt, sie suchen gemeinsam nach dem Roboterdesign und optimieren es: die Form des Roboters, die Stelle, an der Muskeln im Roboterkörper platziert werden sollen, wie weich der Roboter in verschiedenen Körperregionen ist; und basierend auf dem Roboterdesign die Art und Weise, ihn zu steuern, um eine Zielaufgabe zu erfüllen. (Bild: Alex Shipps/MIT CSAIL und die Forscher) Die Plattform macht einen Spaziergang auf der wilden Seite und bietet 3D-Modelle von Tieren wie Pandabären, Fischen, Haien und Raupen als Designs, die sanfte Roboteraufgaben wie Fortbewegung simulieren können , agiles Drehen und Pfadverfolgung in verschiedenen Umgebungen. Ob Schnee, Wüste, Lehm oder Wasser, die Plattform demonstriert die Leistungskompromisse verschiedener Designs in unterschiedlichem Gelände.
„Unser Framework kann Benutzern helfen, die beste Konfiguration für die Form eines Roboters zu finden, und es ihnen ermöglichen, Soft-Robotik-Algorithmen zu entwerfen, die viele verschiedene Dinge tun können“, sagt MIT-Doktorand Tsun-Hsuan Wang, ein Partner des Computer Science and Artificial Intelligence Laboratory ( CSAIL), der leitender Forscher des Projekts ist. „Im Wesentlichen hilft es uns, die besten Strategien für Roboter zur Interaktion mit ihrer Umgebung zu verstehen.“ SoftZoo ist umfassender als ähnliche Plattformen, die bereits Design und Steuerung simulieren, da es Bewegungen modelliert, die auf die physikalischen Merkmale verschiedener Biome reagieren. Die Vielseitigkeit des Frameworks beruht auf einer differenzierbaren Multiphysik-Engine, die die gleichzeitige Simulation mehrerer Aspekte eines physikalischen Systems ermöglicht, beispielsweise einer Babyrobbe, die sich auf Eis dreht, oder einer Raupe, die sich zentimeterweise durch ein Feuchtgebiet bewegt. Die Differenzierbarkeit der Engine optimiert das Co-Design, indem die Anzahl der oft teuren Simulationen reduziert wird, die zur Lösung rechnerischer Steuerungs- und Designprobleme erforderlich sind. Dadurch können Benutzer Soft-Roboter mit ausgefeilteren, spezifizierten Algorithmen entwerfen und bewegen.
Die Fähigkeit des Systems, Interaktionen mit unterschiedlichem Gelände zu simulieren, verdeutlicht die Bedeutung der Morphologie, einem Zweig der Biologie, der die Formen, Größen und Gestalten verschiedener Organismen untersucht. Abhängig von der Umgebung sind einige biologische Strukturen optimaler als andere, ähnlich wie der Vergleich von Bauplänen für Maschinen, die ähnliche Aufgaben ausführen.
Diese biologischen Umrisse können zu spezialisierterem, geländespezifischem künstlichem Leben inspirieren. „Die sanft gewellte Geometrie einer Qualle ermöglicht es ihr, sich effizient über große Gewässer zu bewegen, was Forscher dazu inspiriert, neue Arten weicher Roboter zu entwickeln und unbegrenzte Möglichkeiten dessen zu eröffnen, wozu vollständig in silico gezüchtete künstliche Kreaturen fähig sein können“, sagt Wang. „Darüber hinaus können Libellen sehr agile Manöver ausführen, die andere fliegende Lebewesen nicht ausführen können, da sie spezielle Strukturen an ihren Flügeln haben, die beim Fliegen ihren Schwerpunkt verändern. Unsere Plattform optimiert die Fortbewegung auf die gleiche Weise, wie eine Libelle von Natur aus besser darin ist, sich durch ihre Umgebung zu bewegen.“ Früher hatten Roboter Schwierigkeiten, sich in unübersichtlichen Umgebungen zurechtzufinden, weil ihr Körper sich nicht an die Umgebung anpasste. Mit SoftZoo könnten Designer jedoch das Gehirn und den Körper des Roboters gleichzeitig entwickeln und dabei sowohl Land- als auch Wassermaschinen gemeinsam optimieren, um bewusster und spezialisierter zu sein. Mit erhöhter Verhaltens- und morphologischer Intelligenz wären die Roboter dann nützlicher bei der Durchführung von Rettungsmissionen und der Durchführung von Erkundungen. Wenn beispielsweise während einer Überschwemmung eine Person vermisst wird, könnte der Roboter möglicherweise effizienter durch die Gewässer reisen, da er mithilfe von Methoden optimiert wurde, die auf der SotftZoo-Plattform demonstriert wurden.
„SoftZoo bietet Open-Source-Simulationen für Soft-Roboter-Designer und hilft ihnen dabei, reale Roboter viel einfacher und flexibler zu bauen und gleichzeitig die Fortbewegungsfähigkeiten der Maschinen in verschiedenen Umgebungen zu beschleunigen“, fügt der Co-Autor der Studie, Chuang Gan, ein Forschungswissenschaftler am MIT, hinzu -IBM Watson AI Lab, der bald Assistenzprofessor an der University of Massachusetts in Amherst sein wird.
„Dieser rechnerische Ansatz zur gemeinsamen Gestaltung der weichen Roboterkörper und ihrer Gehirne (d. h. ihrer Steuerungen) öffnet die Tür zur schnellen Entwicklung maßgeschneiderter Maschinen, die für eine bestimmte Aufgabe entwickelt wurden“, fügt Daniela Rus, Direktorin von CSAIL und Andrew and, hinzu Erna Viterbi Professorin am MIT Department of Electrical Engineering and Computer Science (EECS), eine weitere Autorin der Arbeit.
Bevor irgendeine Art von Roboter konstruiert wird, könnte das Framework ein Ersatz für Feldtests unnatürlicher Szenen sein. Beispielsweise kann es für ein Forschungsteam, das in den städtischen Ebenen von Boston arbeitet, eine Herausforderung sein, zu beurteilen, wie sich ein bärenähnlicher Roboter in der Wüste verhält. Stattdessen könnten Soft-Robotik-Ingenieure 3D-Modelle in SoftZoo verwenden, um verschiedene Designs zu simulieren und zu bewerten, wie effektiv die Algorithmen zur Steuerung ihrer Roboter bei der Navigation sind. Dies wiederum würde den Forschern Zeit und Ressourcen sparen.
Dennoch stehen die Einschränkungen aktueller Fertigungstechniken der Verwirklichung dieser Soft-Roboter-Designs im Weg. „Der Übergang von der Simulation zum physischen Roboter bleibt ungelöst und erfordert weitere Untersuchungen“, sagt Wang. „Die Muskelmodelle, die räumlich variierende Steifheit und die Sensorisierung in SoftZoo können mit aktuellen Herstellungstechniken nicht einfach realisiert werden, daher arbeiten wir an diesen Herausforderungen.“ Zukünftig streben die Entwickler der Plattform Anwendungen in der menschlichen Mechanik an, beispielsweise in der Manipulation, da sie die Robotersteuerung testen kann. Um dieses Potenzial zu demonstrieren, entwarf Wangs Team einen dreidimensionalen Arm, der einen Schneeball nach vorne wirft.
Die Forscher entwickelten ein System für das Soft-Roboter-Co-Design, das heißt, sie suchen gemeinsam nach dem Roboterdesign und optimieren es: die Form des Roboters, die Stelle, an der Muskeln im Roboterkörper platziert werden sollen, wie weich der Roboter in verschiedenen Körperregionen ist; und basierend auf dem Roboterdesign die Art und Weise, ihn zu steuern, um eine Zielaufgabe zu erfüllen. (Bild: Alex Shipps/MIT CSAIL und die Forscher) Die Plattform macht einen Spaziergang auf der wilden Seite und bietet 3D-Modelle von Tieren wie Pandabären, Fischen, Haien und Raupen als Designs, die sanfte Roboteraufgaben wie Fortbewegung simulieren können , agiles Drehen und Pfadverfolgung in verschiedenen Umgebungen. Ob Schnee, Wüste, Lehm oder Wasser, die Plattform demonstriert die Leistungskompromisse verschiedener Designs in unterschiedlichem Gelände.
„Unser Framework kann Benutzern helfen, die beste Konfiguration für die Form eines Roboters zu finden, und es ihnen ermöglichen, Soft-Robotik-Algorithmen zu entwerfen, die viele verschiedene Dinge tun können“, sagt MIT-Doktorand Tsun-Hsuan Wang, ein Partner des Computer Science and Artificial Intelligence Laboratory ( CSAIL), der leitender Forscher des Projekts ist. „Im Wesentlichen hilft es uns, die besten Strategien für Roboter zur Interaktion mit ihrer Umgebung zu verstehen.“ SoftZoo ist umfassender als ähnliche Plattformen, die bereits Design und Steuerung simulieren, da es Bewegungen modelliert, die auf die physikalischen Merkmale verschiedener Biome reagieren. Die Vielseitigkeit des Frameworks beruht auf einer differenzierbaren Multiphysik-Engine, die die gleichzeitige Simulation mehrerer Aspekte eines physikalischen Systems ermöglicht, beispielsweise einer Babyrobbe, die sich auf Eis dreht, oder einer Raupe, die sich zentimeterweise durch ein Feuchtgebiet bewegt. Die Differenzierbarkeit der Engine optimiert das Co-Design, indem die Anzahl der oft teuren Simulationen reduziert wird, die zur Lösung rechnerischer Steuerungs- und Designprobleme erforderlich sind. Dadurch können Benutzer Soft-Roboter mit ausgefeilteren, spezifizierten Algorithmen entwerfen und bewegen.
Die Fähigkeit des Systems, Interaktionen mit unterschiedlichem Gelände zu simulieren, verdeutlicht die Bedeutung der Morphologie, einem Zweig der Biologie, der die Formen, Größen und Gestalten verschiedener Organismen untersucht. Abhängig von der Umgebung sind einige biologische Strukturen optimaler als andere, ähnlich wie der Vergleich von Bauplänen für Maschinen, die ähnliche Aufgaben ausführen.
Diese biologischen Umrisse können zu spezialisierterem, geländespezifischem künstlichem Leben inspirieren. „Die sanft gewellte Geometrie einer Qualle ermöglicht es ihr, sich effizient über große Gewässer zu bewegen, was Forscher dazu inspiriert, neue Arten weicher Roboter zu entwickeln und unbegrenzte Möglichkeiten dessen zu eröffnen, wozu vollständig in silico gezüchtete künstliche Kreaturen fähig sein können“, sagt Wang. „Darüber hinaus können Libellen sehr agile Manöver ausführen, die andere fliegende Lebewesen nicht ausführen können, da sie spezielle Strukturen an ihren Flügeln haben, die beim Fliegen ihren Schwerpunkt verändern. Unsere Plattform optimiert die Fortbewegung auf die gleiche Weise, wie eine Libelle von Natur aus besser darin ist, sich durch ihre Umgebung zu bewegen.“ Früher hatten Roboter Schwierigkeiten, sich in unübersichtlichen Umgebungen zurechtzufinden, weil ihr Körper sich nicht an die Umgebung anpasste. Mit SoftZoo könnten Designer jedoch das Gehirn und den Körper des Roboters gleichzeitig entwickeln und dabei sowohl Land- als auch Wassermaschinen gemeinsam optimieren, um bewusster und spezialisierter zu sein. Mit erhöhter Verhaltens- und morphologischer Intelligenz wären die Roboter dann nützlicher bei der Durchführung von Rettungsmissionen und der Durchführung von Erkundungen. Wenn beispielsweise während einer Überschwemmung eine Person vermisst wird, könnte der Roboter möglicherweise effizienter durch die Gewässer reisen, da er mithilfe von Methoden optimiert wurde, die auf der SotftZoo-Plattform demonstriert wurden.
„SoftZoo bietet Open-Source-Simulationen für Soft-Roboter-Designer und hilft ihnen dabei, reale Roboter viel einfacher und flexibler zu bauen und gleichzeitig die Fortbewegungsfähigkeiten der Maschinen in verschiedenen Umgebungen zu beschleunigen“, fügt der Co-Autor der Studie, Chuang Gan, ein Forschungswissenschaftler am MIT, hinzu -IBM Watson AI Lab, der bald Assistenzprofessor an der University of Massachusetts in Amherst sein wird.
„Dieser rechnerische Ansatz zur gemeinsamen Gestaltung der weichen Roboterkörper und ihrer Gehirne (d. h. ihrer Steuerungen) öffnet die Tür zur schnellen Entwicklung maßgeschneiderter Maschinen, die für eine bestimmte Aufgabe entwickelt wurden“, fügt Daniela Rus, Direktorin von CSAIL und Andrew and, hinzu Erna Viterbi Professorin am MIT Department of Electrical Engineering and Computer Science (EECS), eine weitere Autorin der Arbeit.
Bevor irgendeine Art von Roboter konstruiert wird, könnte das Framework ein Ersatz für Feldtests unnatürlicher Szenen sein. Beispielsweise kann es für ein Forschungsteam, das in den städtischen Ebenen von Boston arbeitet, eine Herausforderung sein, zu beurteilen, wie sich ein bärenähnlicher Roboter in der Wüste verhält. Stattdessen könnten Soft-Robotik-Ingenieure 3D-Modelle in SoftZoo verwenden, um verschiedene Designs zu simulieren und zu bewerten, wie effektiv die Algorithmen zur Steuerung ihrer Roboter bei der Navigation sind. Dies wiederum würde den Forschern Zeit und Ressourcen sparen.
Dennoch stehen die Einschränkungen aktueller Fertigungstechniken der Verwirklichung dieser Soft-Roboter-Designs im Weg. „Der Übergang von der Simulation zum physischen Roboter bleibt ungelöst und erfordert weitere Untersuchungen“, sagt Wang. „Die Muskelmodelle, die räumlich variierende Steifheit und die Sensorisierung in SoftZoo können mit aktuellen Herstellungstechniken nicht einfach realisiert werden, daher arbeiten wir an diesen Herausforderungen.“ Zukünftig streben die Entwickler der Plattform Anwendungen in der menschlichen Mechanik an, beispielsweise in der Manipulation, da sie die Robotersteuerung testen kann. Um dieses Potenzial zu demonstrieren, entwarf Wangs Team einen dreidimensionalen Arm, der einen Schneeball nach vorne wirft.
- SEO-gestützte Content- und PR-Distribution. Holen Sie sich noch heute Verstärkung.
- PlatoAiStream. Web3-Datenintelligenz. Wissen verstärkt. Hier zugreifen.
- Die Zukunft prägen mit Adryenn Ashley. Hier zugreifen.
- Quelle: https://www.nanowerk.com/news2/robotics/newsid=62936.php
- :hast
- :Ist
- :nicht
- :Wo
- $UP
- 10
- 11
- 12
- 8
- 9
- a
- Fähigkeit
- beschleunigend
- Erreichen
- über
- Fügt
- angenommen
- Affiliate
- agil
- AI
- alex
- Algorithmen
- Zulassen
- erlaubt
- bereits
- an
- und
- Martin
- Tiere
- Ein anderer
- jedem
- Anwendungen
- Ansatz
- SIND
- ARM
- Waffen
- künstlich
- künstliche Intelligenz
- AS
- Aspekte
- Beurteilung
- Assistentin
- At
- Autor
- Im Prinzip so, wie Sie es von Google Maps kennen.
- Baby
- basierend
- BE
- Bären
- weil
- war
- Bevor
- BESTE
- Biologie
- Körper
- Boston
- beide
- Gehirn
- Kopf
- Filiale
- Bringing
- bauen
- Building
- by
- CAN
- kann keine
- Fähigkeiten
- fähig
- Center
- Herausforderungen
- herausfordernd
- Übernehmen
- Mitverfasser
- kommt
- Vergleich
- abschließen
- Abschluss
- konform
- umfassend
- Computer
- Computerwissenschaften
- Leitung
- Konfiguration
- Smartgeräte App
- Regelung
- könnte
- Erstellen
- CSAIL
- Strom
- maßgeschneiderte
- Datum
- zeigen
- Synergie
- zeigt
- Abteilung
- Abhängig
- WÜSTE
- Design
- entworfen
- Designer
- Designs
- entschlossen
- entwickeln
- entwickelt
- Entwicklung
- anders
- Direktor
- verschieden
- do
- Von
- Libellen
- Libelle
- im
- leicht
- Effektiv
- effizient
- Elektrotechnik
- ermöglicht
- Motor
- Entwicklung
- Ingenieure
- vollständig
- Arbeitsumfeld
- Umgebungen
- Essenz
- bewerten
- Sogar
- Beispiel
- teuer
- Exploration
- Eigenschaften
- Feld
- Finden Sie
- flexibel
- Flut
- Fliegen
- Folgende
- Aussichten für
- Formen
- vorwärts
- Unser Ansatz
- für
- weiter
- Zukunft
- erzeugen
- Geometrie
- gegeben
- Griff
- Haben
- Hilfe
- Unternehmen
- hilft
- Ultraschall
- HTTPS
- human
- EIS
- if
- zeigt
- Image
- Bedeutung
- Verbesserung
- in
- Einschließlich
- hat
- Inspiration
- inspirieren
- inspirierend
- beantragen müssen
- Intelligenz
- interagieren
- Interaktionen
- IT
- SEINE
- jpg
- Labor
- Labor
- grosse
- führen
- Lebensdauer
- Gefällt mir
- Einschränkungen
- aussehen
- aussehen wie
- Maschinen
- Manipulation
- viele
- Masse
- Massachusetts
- Kann..
- Mittel
- Mechanik
- Methoden
- Mitte
- Kommt demnächst...
- Missionen
- MIT
- für
- mehr
- Bewegung
- schlauer bewegen
- Bewegung
- viel
- Navigieren
- Menü
- Neu
- Anzahl
- Objekte
- of
- vorgenommen,
- on
- EINEM
- Open-Source-
- Eröffnung
- öffnet
- optimal
- optimiert
- Verbessert
- Optimierung
- or
- Andere
- Anders
- UNSERE
- Umrissen
- Weg
- ausführen
- Leistung
- person
- physikalisch
- Plattform
- Plattformen
- Plato
- Datenintelligenz von Plato
- PlatoData
- Möglichkeiten
- Potenzial
- möglicherweise
- vorher
- Probleme
- Professor
- Projekt
- bietet
- setzen
- schnell
- Reagiert
- realen Welt
- realisiert
- Reduzierung
- Regionen
- Rehabilitation
- bleibt bestehen
- falls angefordert
- erfordert
- retten
- Forschungsprojekte
- Forscher
- Forscher
- Downloads
- Folge
- Roboter
- Robotik
- Roboter
- gleich
- Speichern
- sagt
- Szenen
- Wissenschaft
- Wissenschaftler
- Suche
- mehrere
- Form
- Formen
- Sharks
- Seite
- ähnlich
- Simulation
- gleichzeitig
- da
- Größen
- .
- So
- SOFT
- LÖSEN
- einige
- Bald
- anspruchsvoll
- Quelle
- Raumfahrt
- besondere
- spezialisiert
- spezifisch
- angegeben
- Stapel
- Stand
- Schritt
- Immer noch
- Strategien
- Schüler und Studenten
- Es wurden Studien
- Studie
- so
- System
- Einnahme
- Target
- Aufgabe
- und Aufgaben
- Team
- Techniken
- terrestrisch
- Test
- Testen
- als
- zur Verbesserung der Gesundheitsgerechtigkeit
- Das
- Die Zukunft
- ihr
- Sie
- dann
- Diese
- vom Nutzer definierten
- fehlen uns die Worte.
- obwohl?
- Durch
- Wurf
- Zeit
- zu
- reisen
- WENDE
- Drehung
- tippe
- verstehen
- Universität
- unbegrenzt
- URBAN
- us
- -
- Nutzer
- Verwendung von
- verschiedene
- sehr
- wurde
- Wasser
- Fluten
- Watson
- Weg..
- we
- waren
- Was
- wann
- ob
- welche
- während
- WHO
- Wild
- Tiere
- werden wir
- mit
- Arbeiten
- arbeiten,
- würde
- Zephyrnet
Mehr von Nanowerk

Wissenschaftler entdecken eine neue Methode zur Herstellung von Metallnanopartikeln zur Verwendung als Katalysatoren
Quellknoten: 3039388
Zeitstempel: 28. Dezember 2023

Anleitung zum Design von Siliziumgeräten mit verbesserter Effizienz
Quellknoten: 2839986
Zeitstempel: 23. August 2023
Roboterbienen und -wurzeln bieten Hoffnung auf eine gesündere Umwelt und ausreichend Nahrung
Quellknoten: 1977685
Zeitstempel: 25. Februar 2023

Kohlenstoffmaterial in Nanogröße könnte zur Behandlung des Down-Syndroms eingesetzt werden
Quellknoten: 2778869
Zeitstempel: 21. Juli 2023
Eine neuromorphe Synapse, die aus Kernmaterialien für OLED-Fernseher hergestellt wurde
Quellknoten: 2541090
Zeitstempel: 24. März 2023

Beschleunigung nachhaltiger Halbleiter mit „Multielement-Tinte“
Quellknoten: 2911790
Zeitstempel: 28. September 2023
Lichtbetriebener Nanokatalysator zur Herstellung von Wasserstoff mithilfe von Sonnenlicht
Quellknoten: 3053672
Zeitstempel: Jan 10, 2024
Wissenschaftler beobachten den Übergang zu chaotischem Verhalten im Nanometerbereich
Quellknoten: 1982382
Zeitstempel: 27. Februar 2023

Roboter und KI schließen sich zusammen, um hochselektive Katalysatoren zu entdecken
Quellknoten: 1940293
Zeitstempel: 3. Februar 2023