04. april 2023 (Nanowerk nyheder) Robotister har brugt en teknik, der ligner den gamle kunst at folde papir til at udvikle autonome maskiner ud af tynde, fleksible ark. Disse letvægtsrobotter er enklere og billigere at lave og mere kompakte for lettere opbevaring og transport. Men de stive computerchips, der traditionelt er nødvendige for at muliggøre avancerede robotegenskaber - sansning, analyse og reaktion på miljøet - tilføjer ekstra vægt til de tynde pladematerialer og gør dem sværere at folde. De halvlederbaserede komponenter skal derfor tilføjes, efter at en robot har fået sin endelige form. Nu har et tværfagligt team ledet af forskere ved UCLA Samueli School of Engineering skabt en ny fremstillingsteknik til fuldt foldbare robotter, der kan udføre en række komplekse opgaver uden at være afhængige af halvledere. En undersøgelse, der beskriver forskningsresultaterne, blev offentliggjort i Nature Communications ("Origami-baseret integration af robotter, der sanser, beslutter og reagerer").
 En origami-inspireret robot designet af et UCLA-ledet team, der kan vende retningen, når en af dens antenner registrerer en forhindring. (Wenzhong Yan, UCLA) Ved at indlejre fleksible og elektrisk ledende materialer i et forskåret, tyndt polyesterfolieark skabte forskerne et system af informationsbehandlingsenheder eller transistorer, som kan integreres med sensorer og aktuatorer. De programmerede derefter arket med simple computeranalogiske funktioner, der emulerer halvlederes. Når arket var skåret, foldet og samlet, blev det omdannet til en autonom robot, der kan sanse, analysere og reagere på deres omgivelser med præcision. Forskerne kaldte deres robotter "OrigaMechs", en forkortelse for Origami MechanoBots. "Dette arbejde fører til en ny klasse af origami-robotter med udvidede kapaciteter og niveauer af autonomi, mens de bibeholder de gunstige egenskaber, der er forbundet med origami-foldningsbaseret fremstilling," sagde studielederforfatter Wenzhong Yan, en UCLA-doktorand i maskinteknik. OrigaMechs afledte deres computeregenskaber fra en kombination af mekaniske origami-multipleksede switche skabt af folderne og programmerede booleske logiske kommandoer, såsom "AND", "OR" og "NOT". Kontakterne aktiverede en mekanisme, der selektivt udsender elektriske signaler baseret på det variable tryk og varmeinput i systemet. Ved at bruge den nye tilgang byggede teamet tre robotter for at demonstrere systemets potentiale:
En origami-inspireret robot designet af et UCLA-ledet team, der kan vende retningen, når en af dens antenner registrerer en forhindring. (Wenzhong Yan, UCLA) Ved at indlejre fleksible og elektrisk ledende materialer i et forskåret, tyndt polyesterfolieark skabte forskerne et system af informationsbehandlingsenheder eller transistorer, som kan integreres med sensorer og aktuatorer. De programmerede derefter arket med simple computeranalogiske funktioner, der emulerer halvlederes. Når arket var skåret, foldet og samlet, blev det omdannet til en autonom robot, der kan sanse, analysere og reagere på deres omgivelser med præcision. Forskerne kaldte deres robotter "OrigaMechs", en forkortelse for Origami MechanoBots. "Dette arbejde fører til en ny klasse af origami-robotter med udvidede kapaciteter og niveauer af autonomi, mens de bibeholder de gunstige egenskaber, der er forbundet med origami-foldningsbaseret fremstilling," sagde studielederforfatter Wenzhong Yan, en UCLA-doktorand i maskinteknik. OrigaMechs afledte deres computeregenskaber fra en kombination af mekaniske origami-multipleksede switche skabt af folderne og programmerede booleske logiske kommandoer, såsom "AND", "OR" og "NOT". Kontakterne aktiverede en mekanisme, der selektivt udsender elektriske signaler baseret på det variable tryk og varmeinput i systemet. Ved at bruge den nye tilgang byggede teamet tre robotter for at demonstrere systemets potentiale:
en insektlignende gårobot, der vender retningen, når en af dens antenner registrerer en forhindring
en Venus fluefælde-lignende robot, der omslutter et "bytte", når begge dens kæbesensorer registrerer en genstand
en omprogrammerbar tohjulet robot, der kan bevæge sig langs foruddesignede baner med forskellige geometriske mønstre
 En Venus-fluefældelignende robot, der omslutter et "bytte", når begge dens kæbesensorer registrerer et objekt. (Billede: UCLA) Mens robotterne var bundet til en strømkilde til demonstrationen, sagde forskerne, at det langsigtede mål ville være at udstyre de autonome origami-robotter med et indlejret energilagringssystem drevet af tyndfilmslithium-batterier. Det chipfrie design kan føre til robotter, der er i stand til at arbejde i ekstreme miljøer - stærke strålings- eller magnetiske felter og steder med intense radiofrekvenssignaler eller høje elektrostatiske udladninger - hvor traditionel halvlederbaseret elektronik muligvis ikke fungerer. "Disse typer af farlige eller uforudsigelige scenarier, såsom under en naturkatastrofe eller menneskeskabt katastrofe, kunne være, hvor origami-robotter viste sig at være særligt nyttige," sagde undersøgelsens hovedefterforsker Ankur Mehta, en assisterende professor i elektro- og computerteknik og direktør for UCLA's Laboratory. til indlejrede maskiner og allestedsnærværende robotter. "Robotterne kunne designes til specialfunktioner og fremstilles efter behov meget hurtigt," tilføjede Mehta. "Også, selvom det er meget langt væk, kan der være miljøer på andre planeter, hvor opdagelsesrobotter, der er uigennemtrængelige for disse scenarier, ville være meget ønskværdige." Formonterede robotter bygget ved hjælp af denne fleksible cut-and-fold-teknik kunne transporteres i flad emballage for massive pladsbesparelser. Dette er vigtigt i scenarier som rummissioner, hvor hver kubikcentimeter tæller. De billige, lette og enkle at fremstille robotter kan også føre til innovative pædagogiske værktøjer eller nye typer legetøj og spil.
En Venus-fluefældelignende robot, der omslutter et "bytte", når begge dens kæbesensorer registrerer et objekt. (Billede: UCLA) Mens robotterne var bundet til en strømkilde til demonstrationen, sagde forskerne, at det langsigtede mål ville være at udstyre de autonome origami-robotter med et indlejret energilagringssystem drevet af tyndfilmslithium-batterier. Det chipfrie design kan føre til robotter, der er i stand til at arbejde i ekstreme miljøer - stærke strålings- eller magnetiske felter og steder med intense radiofrekvenssignaler eller høje elektrostatiske udladninger - hvor traditionel halvlederbaseret elektronik muligvis ikke fungerer. "Disse typer af farlige eller uforudsigelige scenarier, såsom under en naturkatastrofe eller menneskeskabt katastrofe, kunne være, hvor origami-robotter viste sig at være særligt nyttige," sagde undersøgelsens hovedefterforsker Ankur Mehta, en assisterende professor i elektro- og computerteknik og direktør for UCLA's Laboratory. til indlejrede maskiner og allestedsnærværende robotter. "Robotterne kunne designes til specialfunktioner og fremstilles efter behov meget hurtigt," tilføjede Mehta. "Også, selvom det er meget langt væk, kan der være miljøer på andre planeter, hvor opdagelsesrobotter, der er uigennemtrængelige for disse scenarier, ville være meget ønskværdige." Formonterede robotter bygget ved hjælp af denne fleksible cut-and-fold-teknik kunne transporteres i flad emballage for massive pladsbesparelser. Dette er vigtigt i scenarier som rummissioner, hvor hver kubikcentimeter tæller. De billige, lette og enkle at fremstille robotter kan også føre til innovative pædagogiske værktøjer eller nye typer legetøj og spil.
En origami-inspireret robot designet af et UCLA-ledet team, der kan vende retningen, når en af dens antenner registrerer en forhindring. (Wenzhong Yan, UCLA) Ved at indlejre fleksible og elektrisk ledende materialer i et forskåret, tyndt polyesterfolieark skabte forskerne et system af informationsbehandlingsenheder eller transistorer, som kan integreres med sensorer og aktuatorer. De programmerede derefter arket med simple computeranalogiske funktioner, der emulerer halvlederes. Når arket var skåret, foldet og samlet, blev det omdannet til en autonom robot, der kan sanse, analysere og reagere på deres omgivelser med præcision. Forskerne kaldte deres robotter "OrigaMechs", en forkortelse for Origami MechanoBots. "Dette arbejde fører til en ny klasse af origami-robotter med udvidede kapaciteter og niveauer af autonomi, mens de bibeholder de gunstige egenskaber, der er forbundet med origami-foldningsbaseret fremstilling," sagde studielederforfatter Wenzhong Yan, en UCLA-doktorand i maskinteknik. OrigaMechs afledte deres computeregenskaber fra en kombination af mekaniske origami-multipleksede switche skabt af folderne og programmerede booleske logiske kommandoer, såsom "AND", "OR" og "NOT". Kontakterne aktiverede en mekanisme, der selektivt udsender elektriske signaler baseret på det variable tryk og varmeinput i systemet. Ved at bruge den nye tilgang byggede teamet tre robotter for at demonstrere systemets potentiale:
En Venus-fluefældelignende robot, der omslutter et "bytte", når begge dens kæbesensorer registrerer et objekt. (Billede: UCLA) Mens robotterne var bundet til en strømkilde til demonstrationen, sagde forskerne, at det langsigtede mål ville være at udstyre de autonome origami-robotter med et indlejret energilagringssystem drevet af tyndfilmslithium-batterier. Det chipfrie design kan føre til robotter, der er i stand til at arbejde i ekstreme miljøer - stærke strålings- eller magnetiske felter og steder med intense radiofrekvenssignaler eller høje elektrostatiske udladninger - hvor traditionel halvlederbaseret elektronik muligvis ikke fungerer. "Disse typer af farlige eller uforudsigelige scenarier, såsom under en naturkatastrofe eller menneskeskabt katastrofe, kunne være, hvor origami-robotter viste sig at være særligt nyttige," sagde undersøgelsens hovedefterforsker Ankur Mehta, en assisterende professor i elektro- og computerteknik og direktør for UCLA's Laboratory. til indlejrede maskiner og allestedsnærværende robotter. "Robotterne kunne designes til specialfunktioner og fremstilles efter behov meget hurtigt," tilføjede Mehta. "Også, selvom det er meget langt væk, kan der være miljøer på andre planeter, hvor opdagelsesrobotter, der er uigennemtrængelige for disse scenarier, ville være meget ønskværdige." Formonterede robotter bygget ved hjælp af denne fleksible cut-and-fold-teknik kunne transporteres i flad emballage for massive pladsbesparelser. Dette er vigtigt i scenarier som rummissioner, hvor hver kubikcentimeter tæller. De billige, lette og enkle at fremstille robotter kan også føre til innovative pædagogiske værktøjer eller nye typer legetøj og spil.
- SEO Powered Content & PR Distribution. Bliv forstærket i dag.
- Platoblokkæde. Web3 Metaverse Intelligence. Viden forstærket. Adgang her.
- Kilde: https://www.nanowerk.com/news2/robotics/newsid=62741.php
- :er
- 10
- 7
- 9
- a
- Lov
- tilføjet
- fremskreden
- Efter
- analysere
- analysere
- Ancient
- ,
- tilgang
- ER
- Kunst
- AS
- samlet
- Assistant
- forbundet
- At
- attributter
- forfatter
- autonom
- baseret
- batterier
- BE
- bygget
- by
- CAN
- kapaciteter
- stand
- center
- billigere
- Chips
- klasse
- kombination
- komplekse
- komponenter
- computer
- Computer Engineering
- computing
- kunne
- oprettet
- Klip
- Dangerous
- Dato
- beslutte
- Efterspørgsel
- demonstrere
- Afledt
- Design
- konstrueret
- Detailing
- udvikle
- forskellige
- retning
- Direktør
- katastrofe
- i løbet af
- lettere
- uddannelsesmæssige
- enten
- Elektronik
- indlejret
- muliggøre
- aktiveret
- energi
- Engineering
- Miljø
- miljøer
- især
- Hver
- udvidet
- opdagelsesrejsende
- ekstra
- ekstrem
- FAIL
- Fields
- Film
- endelige
- flad
- fleksibel
- Til
- Frekvens
- fra
- fuldt ud
- funktion
- funktioner
- Spil
- mål
- Have
- Høj
- Men
- HTTPS
- billede
- vigtigt
- in
- innovativ
- indgang
- integreret
- integration
- ITS
- jpg
- laboratorium
- føre
- Leads
- Led
- niveauer
- letvægt
- lithium
- Lang
- langsigtet
- lave omkostninger
- Maskiner
- lave
- maerker
- fremstillet
- massive
- materialer
- mekanisk
- maskiningeniør
- mekanisme
- Mellemøsten
- måske
- missioner
- mere
- bevæge sig
- tværfaglig
- Som hedder
- Natural
- behov
- Ny
- objekt
- hindring
- of
- on
- Andet
- output
- emballage
- Papir
- udføre
- Steder
- Planeter
- plato
- Platon Data Intelligence
- PlatoData
- potentiale
- magt
- strøm
- Precision
- tryk
- Main
- Professor
- programmerede
- bevist
- offentliggjort
- hurtigt
- Radio
- forskning
- forskere
- Svar
- reagere
- svar
- vende
- stiv
- robot
- robotter
- Said
- Besparelser
- scenarier
- Skole
- School of Engineering
- Halvledere
- forstand
- sensorer
- Shape
- Kort
- signaler
- lignende
- Simpelt
- Kilde
- Space
- Specialty
- opbevaring
- stærk
- studerende
- Studere
- sådan
- systemet
- opgaver
- hold
- at
- deres
- Them
- derfor
- Disse
- tre
- til
- værktøjer
- traditionelle
- traditionelt
- omdannet
- transportere
- transporteres
- typer
- allestedsnærværende
- UCLA
- enheder
- uforudsigelige
- række
- Venus
- gå
- Vej..
- vægt
- som
- mens
- med
- uden
- Arbejde
- arbejder
- ville
- zephyrnet
Mere fra Nanoværk
Maskinlæring bruges til at undersøge byggestenene i former
Kildeknude: 2917167
Tidsstempel: Oktober 4, 2023
AI Coscientist automatiserer videnskabelig opdagelse
Kildeknude: 3030868
Tidsstempel: December 22, 2023
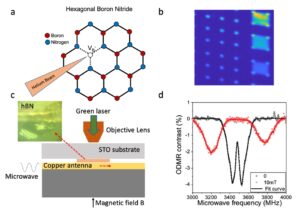
Spindefekter i hexagonalt bornitrid skabt af heliumionbombardement
Kildeknude: 2782123
Tidsstempel: Juli 24, 2023
Ultrasmå hvirvlende magnetiske hvirvler detekteret i jernholdigt materiale
Kildeknude: 2559197
Tidsstempel: April 2, 2023

Forskning identificerer en ny potentiel hindring for nano-baserede terapier
Kildeknude: 2887620
Tidsstempel: September 18, 2023

Forskere har klippet verdens mindste julerekord (m/video)
Kildeknude: 1850116
Tidsstempel: December 22, 2022
Udvidelse af plasmoniske forbedringsgrænser med sekskantet bornitrid
Kildeknude: 2606223
Tidsstempel: April 24, 2023


Computere, der driver selvkørende biler, kan være en stor drivkraft for globale kulstofemissioner
Kildeknude: 1903892
Tidsstempel: Jan 16, 2023