29. maj 2023 (Nanowerk nyheder) Forskere fra Department of Mechanical Science and Bioengineering ved Osaka University har opfundet en ny slags gårobot, der udnytter dynamisk ustabilitet til at navigere. Ved at ændre koblingernes fleksibilitet kan robotten fås til at dreje uden behov for komplekse beregningsstyresystemer. Dette arbejde kan hjælpe med at skabe redningsrobotter, der er i stand til at krydse ujævnt terræn. De fleste dyr på Jorden har udviklet et robust bevægelsessystem ved hjælp af ben, der giver dem en høj grad af mobilitet over en bred vifte af miljøer. Noget skuffende har ingeniører, der har forsøgt at kopiere denne tilgang, ofte fundet ud af, at robotter med ben er overraskende skrøbelige. Nedbrydningen af selv et ben på grund af den gentagne stress kan i høj grad begrænse disse robotters evne til at fungere. Derudover kræver styring af et stort antal led, så robotten kan tværgående komplekse miljøer, meget computerkraft. Forbedringer i dette design ville være yderst nyttige til at bygge autonome eller semi-autonome robotter, der kunne fungere som efterforsknings- eller redningskøretøjer og komme ind i farlige områder.
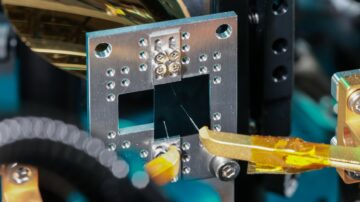
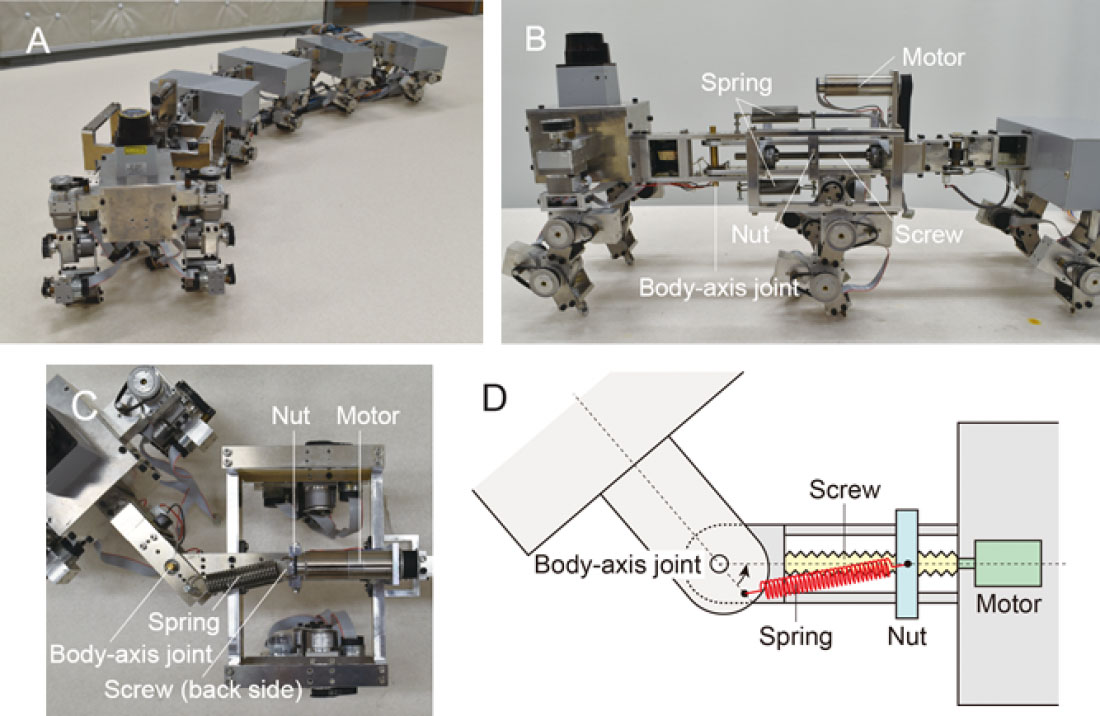 Myriapod-robot (A) og variabel kropsakse-fleksibilitetsmekanisme (B. Set forfra, C. Set ovenfra, D. Skematisk set ovenfra). (Billede: CC BY-NC, 2023, Aoi et al., Soft Robotics) Nu har efterforskere fra Osaka University udviklet en biomimetisk "myriapod"-robot, der udnytter en naturlig ustabilitet, der kan konvertere lige gang til buet bevægelse. I en undersøgelse offentliggjort for nylig i Blød robotik (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), beskriver forskere fra Osaka University deres robot, som består af seks segmenter (med to ben forbundet til hvert segment) og fleksible led. Ved hjælp af en justerbar skrue kan koblingernes fleksibilitet ændres med motorer under gangbevægelsen. Forskerne viste, at øget fleksibilitet i leddene førte til en situation kaldet en "højgaffelbifurkation", hvor lige gang bliver ustabilt. I stedet går robotten over til at gå i et buet mønster, enten til højre eller til venstre. Normalt ville ingeniører forsøge at undgå at skabe ustabilitet. At gøre kontrolleret brug af dem kan dog muliggøre effektiv manøvredygtighed. "Vi blev inspireret af evnen hos visse ekstremt adrætte insekter, der giver dem mulighed for at kontrollere den dynamiske ustabilitet i deres egen bevægelse for at fremkalde hurtige bevægelsesændringer," siger Shinya Aoi, en forfatter til undersøgelsen. Fordi denne tilgang ikke direkte styrer bevægelsen af kropsaksen, men derimod styrer fleksibiliteten, kan den i høj grad reducere både den beregningsmæssige kompleksitet såvel som energikravene.
Myriapod-robot (A) og variabel kropsakse-fleksibilitetsmekanisme (B. Set forfra, C. Set ovenfra, D. Skematisk set ovenfra). (Billede: CC BY-NC, 2023, Aoi et al., Soft Robotics) Nu har efterforskere fra Osaka University udviklet en biomimetisk "myriapod"-robot, der udnytter en naturlig ustabilitet, der kan konvertere lige gang til buet bevægelse. I en undersøgelse offentliggjort for nylig i Blød robotik (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), beskriver forskere fra Osaka University deres robot, som består af seks segmenter (med to ben forbundet til hvert segment) og fleksible led. Ved hjælp af en justerbar skrue kan koblingernes fleksibilitet ændres med motorer under gangbevægelsen. Forskerne viste, at øget fleksibilitet i leddene førte til en situation kaldet en "højgaffelbifurkation", hvor lige gang bliver ustabilt. I stedet går robotten over til at gå i et buet mønster, enten til højre eller til venstre. Normalt ville ingeniører forsøge at undgå at skabe ustabilitet. At gøre kontrolleret brug af dem kan dog muliggøre effektiv manøvredygtighed. "Vi blev inspireret af evnen hos visse ekstremt adrætte insekter, der giver dem mulighed for at kontrollere den dynamiske ustabilitet i deres egen bevægelse for at fremkalde hurtige bevægelsesændringer," siger Shinya Aoi, en forfatter til undersøgelsen. Fordi denne tilgang ikke direkte styrer bevægelsen af kropsaksen, men derimod styrer fleksibiliteten, kan den i høj grad reducere både den beregningsmæssige kompleksitet såvel som energikravene.
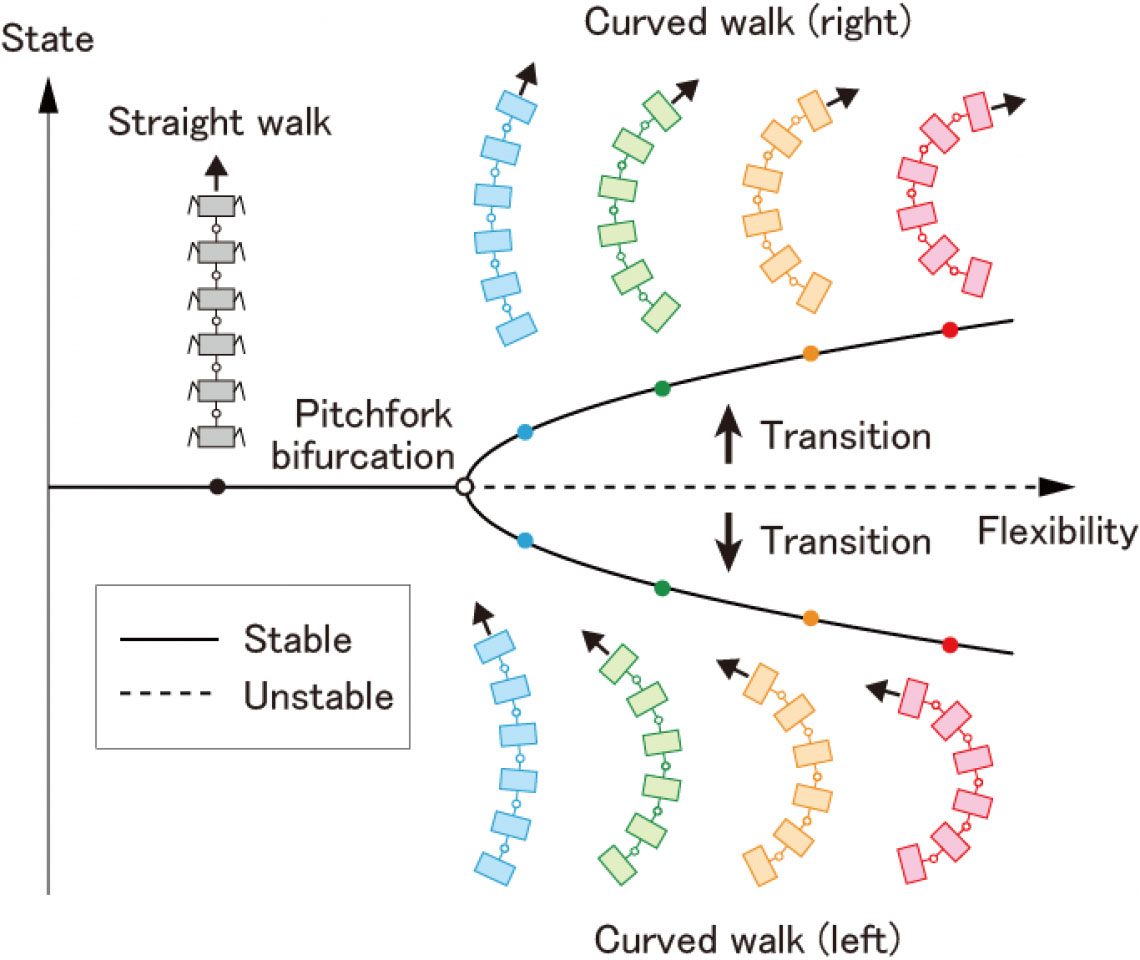 Stabile og ustabile gangmønstre afhængig af kropsaksens fleksibilitet. (Billede: CC BY-NC, 2023, Aoi et al., Soft Robotics) Holdet testede robottens evne til at nå bestemte steder og fandt ud af, at den kunne navigere ved at tage buede stier mod mål. "Vi kan forudse anvendelser i en lang række scenarier, såsom eftersøgning og redning, arbejde i farlige miljøer eller udforskning på andre planeter," siger Mau Adachi, en anden undersøgelsesforfatter. Fremtidige versioner kan indeholde yderligere segmenter og kontrolmekanismer.
Stabile og ustabile gangmønstre afhængig af kropsaksens fleksibilitet. (Billede: CC BY-NC, 2023, Aoi et al., Soft Robotics) Holdet testede robottens evne til at nå bestemte steder og fandt ud af, at den kunne navigere ved at tage buede stier mod mål. "Vi kan forudse anvendelser i en lang række scenarier, såsom eftersøgning og redning, arbejde i farlige miljøer eller udforskning på andre planeter," siger Mau Adachi, en anden undersøgelsesforfatter. Fremtidige versioner kan indeholde yderligere segmenter og kontrolmekanismer.
Myriapod-robot (A) og variabel kropsakse-fleksibilitetsmekanisme (B. Set forfra, C. Set ovenfra, D. Skematisk set ovenfra). (Billede: CC BY-NC, 2023, Aoi et al., Soft Robotics) Nu har efterforskere fra Osaka University udviklet en biomimetisk "myriapod"-robot, der udnytter en naturlig ustabilitet, der kan konvertere lige gang til buet bevægelse. I en undersøgelse offentliggjort for nylig i Blød robotik (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), beskriver forskere fra Osaka University deres robot, som består af seks segmenter (med to ben forbundet til hvert segment) og fleksible led. Ved hjælp af en justerbar skrue kan koblingernes fleksibilitet ændres med motorer under gangbevægelsen. Forskerne viste, at øget fleksibilitet i leddene førte til en situation kaldet en "højgaffelbifurkation", hvor lige gang bliver ustabilt. I stedet går robotten over til at gå i et buet mønster, enten til højre eller til venstre. Normalt ville ingeniører forsøge at undgå at skabe ustabilitet. At gøre kontrolleret brug af dem kan dog muliggøre effektiv manøvredygtighed. "Vi blev inspireret af evnen hos visse ekstremt adrætte insekter, der giver dem mulighed for at kontrollere den dynamiske ustabilitet i deres egen bevægelse for at fremkalde hurtige bevægelsesændringer," siger Shinya Aoi, en forfatter til undersøgelsen. Fordi denne tilgang ikke direkte styrer bevægelsen af kropsaksen, men derimod styrer fleksibiliteten, kan den i høj grad reducere både den beregningsmæssige kompleksitet såvel som energikravene.
Stabile og ustabile gangmønstre afhængig af kropsaksens fleksibilitet. (Billede: CC BY-NC, 2023, Aoi et al., Soft Robotics) Holdet testede robottens evne til at nå bestemte steder og fandt ud af, at den kunne navigere ved at tage buede stier mod mål. "Vi kan forudse anvendelser i en lang række scenarier, såsom eftersøgning og redning, arbejde i farlige miljøer eller udforskning på andre planeter," siger Mau Adachi, en anden undersøgelsesforfatter. Fremtidige versioner kan indeholde yderligere segmenter og kontrolmekanismer.
- SEO Powered Content & PR Distribution. Bliv forstærket i dag.
- PlatoAiStream. Web3 Data Intelligence. Viden forstærket. Adgang her.
- Udmøntning af fremtiden med Adryenn Ashley. Adgang her.
- Køb og sælg aktier i PRE-IPO-virksomheder med PREIPO®. Adgang her.
- Kilde: https://www.nanowerk.com/news2/robotics/newsid=63068.php
- :ikke
- 10
- 2022
- 2023
- 7
- 8
- 9
- a
- evne
- I stand
- Lov
- Desuden
- Yderligere
- justerbar
- Fordel
- adræt
- AL
- tillader
- an
- ,
- dyr
- En anden
- applikationer
- tilgang
- ER
- områder
- AS
- hjælpe
- At
- forsøgt
- forfatter
- autonom
- undgå
- Axis
- BE
- fordi
- bliver
- krop
- både
- Fordeling
- Bygning
- men
- by
- kaldet
- CAN
- center
- vis
- Ændringer
- skiftende
- komplekse
- kompleksitet
- computer
- computerkraft
- tilsluttet
- kontrol
- kontrolleret
- styring
- kontrol
- konvertere
- kunne
- Oprettelse af
- skabelse
- Dangerous
- Dato
- Degree
- Afdeling
- Afhængigt
- beskrive
- Design
- udviklet
- direkte
- gør
- grund
- i løbet af
- dynamisk
- E&T
- hver
- jorden
- effektiv
- enten
- muliggøre
- energi
- Ingeniører
- Indtast
- miljøer
- Endog
- udviklet sig
- udforskning
- ekstremt
- Fleksibilitet
- fleksibel
- Til
- fundet
- fra
- forsiden
- funktion
- fremtiden
- Go
- stærkt
- Have
- Høj
- Men
- HTTPS
- billede
- forbedringer
- in
- omfatter
- stigende
- inspirerede
- ustabilitet
- i stedet
- ind
- Opfundet
- Efterforskere
- IT
- jpg
- Venlig
- stor
- Led
- til venstre
- ben
- GRÆNSE
- placeringer
- Lot
- lavet
- Making
- Kan..
- mekanisk
- mekanisme
- mekanismer
- Mellemøsten
- mobilitet
- modificeret
- mest
- bevægelse
- Motorer
- bevægelse
- Natural
- Naviger
- Behov
- Ny
- Normalt
- nu
- nummer
- of
- tit
- on
- ONE
- or
- Andet
- i løbet af
- egen
- Mønster
- mønstre
- Planeter
- plato
- Platon Data Intelligence
- PlatoData
- magt
- giver
- offentliggjort
- Hurtig
- rækkevidde
- hellere
- nå
- for nylig
- reducere
- gentaget
- Krav
- Kræver
- redde
- forskere
- højre
- robot
- robotteknik
- robotter
- robust
- siger
- scenarier
- Videnskab
- Søg
- segment
- segmenter
- alvorligt
- viste
- Situationen
- SIX
- So
- Soft
- noget
- specifikke
- stabil
- lige
- stress
- Studere
- sådan
- systemet
- Systemer
- tager
- tager
- mål
- hold
- at
- deres
- Them
- Disse
- denne
- til
- top
- mod
- overgange
- prøv
- TUR
- to
- universitet
- brug
- ved brug af
- række
- Køretøjer
- via
- Specifikation
- gå
- GODT
- var
- som
- WHO
- bred
- Bred rækkevidde
- med
- uden
- Arbejde
- arbejder
- ville
- zephyrnet
Mere fra Nanoværk


Origami-baseret integration af robotter, der sanser, beslutter og reagerer
Kildeknude: 2565107
Tidsstempel: April 4, 2023
To/kvasi-todimensionelle perovskit-baserede heterostrukturer: Konstruktion, egenskaber og anvendelser
Kildeknude: 1938788
Tidsstempel: Februar 3, 2023

Forskere beskriver aldrig før sete egenskaber i en familie af superledende Kagome-metaller
Kildeknude: 1952937
Tidsstempel: Februar 11, 2023
Integrerede fotoniske kredsløb kunne hjælpe med at lukke 'terahertz-gabet'
Kildeknude: 1899339
Tidsstempel: Jan 14, 2023

Kulstofemissioner fra gødning kan reduceres med så meget som 80 % inden 2050
Kildeknude: 1951214
Tidsstempel: Februar 11, 2023
Hvordan en rekordstor kobbernanokatalysator omdanner CO2 til flydende brændstoffer
Kildeknude: 1961058
Tidsstempel: Februar 16, 2023
Forskere 3D-printer funktionelt menneskeligt hjernevæv
Kildeknude: 3093799
Tidsstempel: Februar 2, 2024
Udvikling af teknologier til at reducere omkostningerne ved grøn brintproduktion
Kildeknude: 2700260
Tidsstempel: Juni 2, 2023
Lås op for spins hemmeligheder med højharmoniske sonder
Kildeknude: 2969974
Tidsstempel: November 10, 2023