পিজিএ ট্যুর রিয়েল-টাইম ডেটা সহ গল্ফ অভিজ্ঞতা বাড়াতে থাকে যা ভক্তদের গেমের আরও কাছাকাছি নিয়ে আসে। এমনকি আরও সমৃদ্ধ অভিজ্ঞতা প্রদানের জন্য, তারা একটি পরবর্তী প্রজন্মের বল পজিশন ট্র্যাকিং সিস্টেমের বিকাশের চেষ্টা করছে যা স্বয়ংক্রিয়ভাবে সবুজে বলের অবস্থান ট্র্যাক করে।
ট্যুরটি বর্তমানে CDW দ্বারা চালিত শটলিঙ্ক ব্যবহার করে, একটি প্রিমিয়ার স্কোরিং সিস্টেম যা প্রতিটি শটের শুরু এবং শেষ অবস্থানকে ঘনিষ্ঠভাবে ট্র্যাক করতে সাইটে কম্পিউট সহ একটি জটিল ক্যামেরা সিস্টেম ব্যবহার করে। ট্যুর কম্পিউটার ভিশন এবং মেশিন লার্নিং (ML) কৌশলগুলি অন্বেষণ করতে চেয়েছিল যাতে একটি পরবর্তী প্রজন্মের ক্লাউড-ভিত্তিক পাইপলাইন তৈরি করা যায় যাতে সবুজ রঙে গল্ফ বলগুলি সনাক্ত করা যায়৷
আমাজন জেনারেটিভ এআই ইনোভেশন সেন্টার (GAIIC) সাম্প্রতিক পিজিএ ট্যুর ইভেন্ট থেকে একটি উদাহরণ ডেটাসেটে এই কৌশলগুলির কার্যকারিতা প্রদর্শন করেছে। GAIIC একটি মডুলার পাইপলাইন ডিজাইন করেছে যা গভীর কনভোলিউশনাল নিউরাল নেটওয়ার্কের একটি সিরিজ ক্যাসকেড করে যা সফলভাবে খেলোয়াড়দের একটি ক্যামেরার ক্ষেত্রের ভিউয়ের মধ্যে স্থানীয়করণ করে, কোন খেলোয়াড় রাখছে তা নির্ধারণ করে এবং কাপের দিকে যাওয়ার সাথে সাথে বলটিকে ট্র্যাক করে।
এই পোস্টে, আমরা এই পাইপলাইনের উন্নয়ন, কাঁচা ডেটা, পাইপলাইন সমন্বিত কনভোল্যুশনাল নিউরাল নেটওয়ার্কের ডিজাইন এবং এর কার্যকারিতার একটি মূল্যায়ন বর্ণনা করি।
উপাত্ত
ট্যুরটি একটি ছিদ্রে সবুজের চারপাশে অবস্থিত তিনটি 3K ক্যামেরা থেকে সাম্প্রতিক একটি টুর্নামেন্ট থেকে 4 দিনের একটানা ভিডিও সরবরাহ করেছে। নিচের চিত্রটি একটি ক্যামেরা থেকে ক্রপ করা এবং জুম করা একটি ফ্রেম দেখায় যাতে প্লেয়ার স্থাপন করা সহজে দৃশ্যমান হয়। নোট করুন যে ক্যামেরাগুলির উচ্চ রেজোলিউশন সত্ত্বেও, সবুজ থেকে দূরত্বের কারণে, বলটি ছোট দেখায় (সাধারণত 3×3, 4×4 বা 5×5 পিক্সেল), এবং এই আকারের লক্ষ্যগুলি সঠিকভাবে স্থানীয়করণ করা কঠিন হতে পারে।
![]()
ক্যামেরা ফিডগুলি ছাড়াও, ট্যুর GAIIC-কে প্রতিটি শটে টীকাযুক্ত স্কোরিং ডেটা প্রদান করে, যার বিশ্রামের অবস্থানের বিশ্ব অবস্থান এবং টাইমস্ট্যাম্প সহ। এটি সবুজ রঙের প্রতিটি পুটের ভিজ্যুয়ালাইজেশনের জন্য অনুমতি দেয়, পাশাপাশি প্লেয়ার রাখার সমস্ত ভিডিও ক্লিপগুলিকে টেনে নেওয়ার ক্ষমতা, যা ম্যানুয়ালি লেবেল করা যেতে পারে এবং পাইপলাইন তৈরিকারী সনাক্তকরণ মডেলগুলিকে প্রশিক্ষণ দিতে ব্যবহার করা যেতে পারে। নিচের চিত্রটি উপরের বাম দিক থেকে ঘড়ির কাঁটার বিপরীতে আনুমানিক পুট পাথ ওভারলে সহ তিনটি ক্যামেরা ভিউ দেখায়। পিনটি প্রতিদিন সরানো হয়, যেখানে দিন 1 নীল, দিন 2 লাল, এবং দিন 3 কমলা।
পাইপলাইন ওভারভিউ
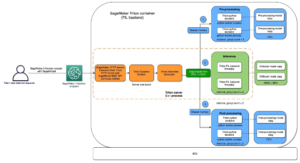
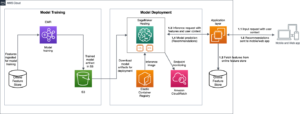
সামগ্রিক সিস্টেমে একটি প্রশিক্ষণ পাইপলাইন এবং অনুমান পাইপলাইন উভয়ই থাকে। নিম্নলিখিত চিত্রটি প্রশিক্ষণ পাইপলাইনের স্থাপত্যকে চিত্রিত করে। স্টার্টিং পয়েন্ট হল ভিডিও ডেটার ইনজেশন, হয় একটি স্ট্রিমিং মডিউল থেকে আমাজন কিনেসিস সরাসরি ভিডিও বা বসানোর জন্য আমাজন সিম্পল স্টোরেজ সার্ভিস (Amazon S3) ঐতিহাসিক ভিডিওর জন্য। প্রশিক্ষণ পাইপলাইনের জন্য ভিডিও প্রিপ্রসেসিং এবং ছবিগুলির হ্যান্ড লেবেলিং প্রয়োজন আমাজন সেজমেকার গ্রাউন্ড ট্রুথ. মডেলদের সাথে প্রশিক্ষণ দেওয়া যেতে পারে আমাজন সেজমেকার এবং তাদের শিল্পকর্ম Amazon S3 এর সাথে সংরক্ষিত।
![]()
অনুমান পাইপলাইন, নিম্নলিখিত চিত্রে দেখানো হয়েছে, অনেকগুলি মডিউল নিয়ে গঠিত যা ক্রমাগতভাবে কাঁচা ভিডিও থেকে তথ্য বের করে এবং শেষ পর্যন্ত বিশ্রামে বলের বিশ্ব স্থানাঙ্কের পূর্বাভাস দেয়। প্রাথমিকভাবে, প্রতিটি ক্যামেরা থেকে বৃহত্তর দৃশ্যের ক্ষেত্র থেকে সবুজ কাটা হয়, যাতে পিক্সেল এলাকাটি কাটতে পারে যেখানে মডেলদের অবশ্যই খেলোয়াড় এবং বল অনুসন্ধান করতে হবে। এরপরে, একটি গভীর কনভোলিউশনাল নিউরাল নেটওয়ার্ক (সিএনএন) দৃশ্যের ক্ষেত্রের লোকেশন খুঁজে বের করতে ব্যবহৃত হয়। অন্য সিএনএন ব্যবহার করা হয় ভবিষ্যদ্বাণী করার জন্য যে কেউ পুট করতে চলেছেন কিনা তা নির্ধারণ করার জন্য কোন ধরনের ব্যক্তি পাওয়া গেছে। একটি সম্ভাব্য পাটারকে দৃশ্যের ক্ষেত্রে স্থানীয়করণ করার পরে, একই নেটওয়ার্কটি পুটারের কাছাকাছি বলের অবস্থানের পূর্বাভাস দিতে ব্যবহৃত হয়। একটি তৃতীয় সিএনএন তার গতির সময় বলটিকে ট্র্যাক করে এবং সবশেষে, ক্যামেরা পিক্সেল অবস্থান থেকে জিপিএস স্থানাঙ্কে একটি রূপান্তর ফাংশন প্রয়োগ করা হয়।
![]()
প্লেয়ার সনাক্তকরণ
যদিও একটি সেট ব্যবধানে পুরো 4K ফ্রেমে বল সনাক্তকরণের জন্য একটি CNN চালানো সম্ভব হবে, এই ক্যামেরা দূরত্বে বলের কৌণিক আকার দেওয়া হলে, যেকোনো ছোট সাদা বস্তু একটি সনাক্তকরণ শুরু করে, ফলে অনেকগুলি মিথ্যা অ্যালার্ম তৈরি হয়। বলের জন্য সম্পূর্ণ ইমেজ ফ্রেম অনুসন্ধান এড়াতে, প্লেয়ার পোজ এবং বলের অবস্থানের মধ্যে পারস্পরিক সম্পর্কের সুবিধা নেওয়া সম্ভব। একটি বল যেটি লাগাতে চলেছে সেটি অবশ্যই একজন খেলোয়াড়ের পাশে থাকতে হবে, তাই দৃশ্যের ক্ষেত্রে খেলোয়াড়দের খুঁজে বের করা পিক্সেল এলাকাটিকে ব্যাপকভাবে সীমাবদ্ধ করবে যেখানে ডিটেক্টরকে বলটি অনুসন্ধান করতে হবে।
আমরা একটি সিএনএন ব্যবহার করতে সক্ষম হয়েছি যা একটি দৃশ্যে সমস্ত লোকের চারপাশে বাউন্ডিং বাক্সের পূর্বাভাস দেওয়ার জন্য পূর্ব-প্রশিক্ষিত ছিল, যেমনটি নিম্নলিখিত চিত্রে দেখানো হয়েছে। দুর্ভাগ্যবশত, সবুজে প্রায়শই একের বেশি বল থাকে, তাই সমস্ত লোককে খুঁজে বের করা এবং একটি বলের সন্ধানের বাইরে আরও যুক্তির প্রয়োজন। বর্তমানে যে প্লেয়ারটি রাখছে তাকে খুঁজে পেতে এটির জন্য অন্য CNN প্রয়োজন।
![]()
প্লেয়ার শ্রেণীবিভাগ এবং বল সনাক্তকরণ
বলটি কোথায় হতে পারে তা আরও সংকুচিত করার জন্য, আমরা সবুজ রঙের সমস্ত লোককে শ্রেণিবদ্ধ করার জন্য একটি প্রাক-প্রশিক্ষিত অবজেক্ট-ডিটেকশন CNN (YOLO v7) তৈরি করেছি। এই প্রক্রিয়ার একটি গুরুত্বপূর্ণ উপাদান হল সেজমেকার গ্রাউন্ড ট্রুথ ব্যবহার করে ম্যানুয়ালি ছবিগুলির একটি সেট লেবেল করা। লেবেলগুলি সিএনএনকে উচ্চ নির্ভুলতার সাথে প্লেয়ারকে শ্রেণীবদ্ধ করার অনুমতি দিয়েছে। লেবেলিং প্রক্রিয়ায়, প্লেয়ার পুটিংয়ের সাথে বলটিকেও রূপরেখা দেওয়া হয়েছিল, তাই এই সিএনএনও বল সনাক্তকরণ করতে সক্ষম হয়েছিল, একটি পুটের আগে বলের চারপাশে একটি প্রাথমিক বাউন্ডিং বক্স আঁকতে এবং ডাউনস্ট্রিম বল ট্র্যাকিং সিএনএন-এ অবস্থানের তথ্য প্রদান করে। .
আমরা চিত্রগুলিতে অবজেক্টগুলিকে টীকা করতে চারটি ভিন্ন লেবেল ব্যবহার করি:
- প্লেয়ার-পুটিং - খেলোয়াড় একটি ক্লাব ধারণ করে এবং পুটিং পজিশনে
- প্লেয়ার-নট-পুটিং - প্লেয়ার পুটিং পজিশনে নেই (একটি ক্লাবও ধারণ করতে পারে)
- অন্য ব্যাক্তি - অন্য কোনো ব্যক্তি যিনি একজন খেলোয়াড় নন
- গলফ এর বল - গলফ বল
নিচের চিত্রটি দেখায় যে একটি সিএনএনকে সেজমেকার গ্রাউন্ড ট্রুথের লেবেল ব্যবহার করে সূক্ষ্ম সুর করা হয়েছে যাতে প্রতিটি ব্যক্তির দৃষ্টিভঙ্গিতে শ্রেণীবদ্ধ করা যায়। খেলোয়াড়, ক্যাডি এবং ভক্তদের ভিজ্যুয়াল উপস্থিতির বিস্তৃত পরিসরের কারণে এটি কঠিন। একজন খেলোয়াড়কে পুটিং হিসেবে শ্রেণীবদ্ধ করার পর, সেই খেলোয়াড়ের চারপাশে অবিলম্বে ছোট এলাকায় বল শনাক্তকরণের জন্য একটি সিএনএন ফাইন-টিউন করা হয়েছিল।
![]()
বল পাথ ট্র্যাকিং
একটি তৃতীয় সিএনএন, একটি রেসনেট আর্কিটেকচার যা গতি ট্র্যাকিংয়ের জন্য প্রাক-প্রশিক্ষিত, বলটি লাগানোর পরে ট্র্যাক করার জন্য ব্যবহার করা হয়েছিল। মোশন ট্র্যাকিং একটি পুঙ্খানুপুঙ্খভাবে গবেষণা করা সমস্যা, তাই এই নেটওয়ার্কটি ভাল পারফর্ম করে যখন পাইপলাইনে আরও সূক্ষ্ম টিউনিং ছাড়াই একত্রিত হয়।
পাইপলাইন আউটপুট
CNN-এর ক্যাসকেড মানুষের চারপাশে বাউন্ডিং বাক্স স্থাপন করে, সবুজে লোকেদের শ্রেণীবদ্ধ করে, প্রাথমিক বলের অবস্থান সনাক্ত করে এবং বলটি চলতে শুরু করলে ট্র্যাক করে। নিম্নলিখিত চিত্রটি পাইপলাইনের লেবেলযুক্ত ভিডিও আউটপুট দেখায়। বলের পিক্সেল অবস্থান ট্র্যাক এবং রেকর্ড করা হয়। মনে রাখবেন যে সবুজ রঙের লোকেদের ট্র্যাক করা হচ্ছে এবং বাউন্ডিং বাক্স দ্বারা রূপরেখা করা হচ্ছে; নীচের পাটারটিকে "প্লেয়ার পুটিং" হিসাবে সঠিকভাবে লেবেল করা হয়েছে এবং চলন্ত বলটিকে একটি ছোট নীল বাউন্ডিং বাক্স দ্বারা ট্র্যাক করা এবং রূপরেখা করা হচ্ছে।
![]()
সম্পাদন
পাইপলাইনের উপাদানগুলির কর্মক্ষমতা মূল্যায়ন করতে, লেবেলযুক্ত ডেটা থাকা প্রয়োজন। যদিও আমাদের বলের গ্রাউন্ড ট্রুথ ওয়ার্ল্ড পজিশন দেওয়া হয়েছিল, আমাদের কাছে গ্রাউন্ড ট্রুথের জন্য মধ্যবর্তী পয়েন্ট ছিল না, যেমন বলের চূড়ান্ত পিক্সেল পজিশন বা প্লেয়ারের পিক্সেলের অবস্থান। আমরা যে লেবেলিং কাজটি করেছি তার সাথে, আমরা পাইপলাইনের এই মধ্যবর্তী আউটপুটগুলির জন্য গ্রাউন্ড ট্রুথ ডেটা তৈরি করেছি যা আমাদের কর্মক্ষমতা পরিমাপ করতে দেয়।
প্লেয়ার শ্রেণীবিভাগ এবং বল সনাক্তকরণ নির্ভুলতা
প্লেয়ার পুটিং এবং প্রাথমিক বলের অবস্থান সনাক্তকরণের জন্য, আমরা একটি ডেটাসেট লেবেল করেছি এবং পূর্বে বর্ণিত হিসাবে একটি YOLO v7 CNN মডেলকে ফাইন-টিউন করেছি। মডেলটি পূর্ববর্তী ব্যক্তি শনাক্তকরণ মডিউল থেকে আউটপুটকে চারটি শ্রেণীতে শ্রেণীবদ্ধ করেছে: একজন প্লেয়ার পুটিং, একজন প্লেয়ার রাখছে না, অন্যান্য লোক এবং গল্ফ বল, যেমনটি নিম্নলিখিত চিত্রে দেখানো হয়েছে।
![]()
এই মডিউলটির কর্মক্ষমতা একটি বিভ্রান্তি ম্যাট্রিক্সের সাথে মূল্যায়ন করা হয়, যা নিম্নলিখিত চিত্রে দেখানো হয়েছে। তির্যক বাক্সের মানগুলি দেখায় যে কত ঘন ঘন ভবিষ্যদ্বাণী করা ক্লাসটি গ্রাউন্ড ট্রুথ লেবেল থেকে প্রকৃত শ্রেণীর সাথে মিলেছে। মডেলটিতে প্রতিটি ব্যক্তি শ্রেণীর জন্য 89% প্রত্যাহার বা আরও ভাল, এবং গলফ বলের জন্য 79% প্রত্যাহার (যা প্রত্যাশিত কারণ মডেলটি লোকেদের সাথে উদাহরণের জন্য পূর্ব-প্রশিক্ষিত কিন্তু গল্ফ বলের উদাহরণগুলিতে নয়; এটির সাথে উন্নত করা যেতে পারে প্রশিক্ষণ সেটে আরও লেবেলযুক্ত গল্ফ বল)।
![]()
পরবর্তী ধাপ হল বল ট্র্যাকার ট্রিগার করা। যেহেতু বল সনাক্তকরণ আউটপুট একটি আত্মবিশ্বাসের সম্ভাবনা, তাই "শনাক্ত করা বল"-এর জন্য থ্রেশহোল্ড সেট করাও সম্ভব এবং নিম্নলিখিত চিত্রে সংক্ষিপ্তভাবে দেখানো ফলাফলগুলি কীভাবে পরিবর্তন করে তা পর্যবেক্ষণ করাও সম্ভব। এই পদ্ধতিতে একটি ট্রেড-অফ রয়েছে কারণ একটি উচ্চ থ্রেশহোল্ডে অগত্যা কম মিথ্যা অ্যালার্ম থাকবে তবে বলের কিছু কম নির্দিষ্ট উদাহরণও মিস হবে। আমরা 20% এবং 50% আত্মবিশ্বাসের থ্রেশহোল্ড পরীক্ষা করেছি এবং যথাক্রমে 78% এবং 61% বল সনাক্তকরণ পেয়েছি। এই পরিমাপ দ্বারা, 20% থ্রেশহোল্ড ভাল। 20% কনফিডেন্স থ্রেশহোল্ডের জন্য ট্রেড-অফ স্পষ্ট যে, মোট সনাক্তকরণের 80% আসলে বল ছিল (20% মিথ্যা পজিটিভ), যেখানে 50% কনফিডেন্স থ্রেশহোল্ডের জন্য, 90% বল ছিল (10% মিথ্যা ইতিবাচক)। কম মিথ্যা ইতিবাচক জন্য, 50% আত্মবিশ্বাস থ্রেশহোল্ড ভাল। একটি বৃহত্তর প্রশিক্ষণ সেটের জন্য আরও লেবেলযুক্ত ডেটা দিয়ে এই উভয় ব্যবস্থাই উন্নত করা যেতে পারে।
![]()
সনাক্তকরণ পাইপলাইন থ্রুপুট প্রতি সেকেন্ডে 10 ফ্রেমের ক্রম অনুসারে, তাই এর বর্তমান আকারে, একটি একক দৃষ্টান্ত প্রতি সেকেন্ডে 50 ফ্রেমে অবিচ্ছিন্নভাবে চালানোর জন্য যথেষ্ট দ্রুত নয়। বল ধাপের পরে আউটপুটের জন্য 7-সেকেন্ডের চিহ্ন অর্জনের জন্য লেটেন্সির জন্য আরও অপ্টিমাইজেশানের প্রয়োজন হবে, সম্ভবত পাইপলাইনের একাধিক সংস্করণ সমান্তরালভাবে চালিয়ে এবং সিএনএন মডেলগুলিকে কোয়ান্টাইজেশনের মাধ্যমে সংকুচিত করে (উদাহরণস্বরূপ)।
বল পাথ ট্র্যাকিং নির্ভুলতা
এমএমট্র্যাকিং থেকে প্রাক-প্রশিক্ষিত সিএনএন মডেলটি ভাল কাজ করে, তবে আকর্ষণীয় ব্যর্থতার ঘটনা রয়েছে। নীচের চিত্রটি এমন একটি কেস দেখায় যেখানে ট্র্যাকারটি বলের উপর শুরু করে, পাটার হেড এবং বল উভয়ই অন্তর্ভুক্ত করার জন্য তার বাউন্ডিং বক্সকে প্রসারিত করে এবং তারপর দুর্ভাগ্যবশত পাটার হেড ট্র্যাক করে এবং বলটি ভুলে যায়। এই ক্ষেত্রে, পাটার মাথা সাদা দেখায় (সম্ভবত স্পেকুলার প্রতিফলনের কারণে), তাই বিভ্রান্তি বোধগম্য; ট্র্যাকিং সিএনএন-এর ট্র্যাকিং এবং ফাইন-টিউনিংয়ের জন্য লেবেলযুক্ত ডেটা ভবিষ্যতে এটিকে উন্নত করতে সহায়তা করতে পারে।
![]()
উপসংহার
এই পোস্টে, আমরা একটি মডুলার পাইপলাইনের বিকাশ নিয়ে আলোচনা করেছি যা খেলোয়াড়দেরকে ক্যামেরার দৃশ্যের ক্ষেত্রে স্থানীয়করণ করে, কোন খেলোয়াড় রাখছে তা নির্ধারণ করে এবং কাপের দিকে যাওয়ার সাথে সাথে বলটিকে ট্র্যাক করে।
PGA ট্যুরের সাথে AWS সহযোগিতা সম্পর্কে আরও তথ্যের জন্য, পড়ুন PGA ট্যুর অনুরাগীদের অভিজ্ঞতা পুনরায় কল্পনা করতে AWS-এর সাথে টিজ আপ করে৷.
লেখক সম্পর্কে
![]() জেমস গোল্ডেন মেশিন লার্নিং এবং নিউরোসায়েন্সের ব্যাকগ্রাউন্ড সহ অ্যামাজন বেডরকের একজন ফলিত বিজ্ঞানী।
জেমস গোল্ডেন মেশিন লার্নিং এবং নিউরোসায়েন্সের ব্যাকগ্রাউন্ড সহ অ্যামাজন বেডরকের একজন ফলিত বিজ্ঞানী।
![]() হেনরি ওয়াং তিনি অ্যামাজন জেনারেটিভ এআই ইনোভেশন সেন্টারের একজন ফলিত বিজ্ঞানী, যেখানে তিনি AWS গ্রাহকদের জন্য জেনারেটিভ এআই সলিউশন নিয়ে গবেষণা করেন এবং তৈরি করেন। তিনি খেলাধুলা এবং মিডিয়া এবং বিনোদন শিল্পগুলিতে মনোনিবেশ করেন এবং অতীতে বিভিন্ন ক্রীড়া লীগ, দল এবং সম্প্রচারকারীদের সাথে কাজ করেছেন। তার অবসর সময়ে, তিনি টেনিস এবং গল্ফ খেলতে পছন্দ করেন।
হেনরি ওয়াং তিনি অ্যামাজন জেনারেটিভ এআই ইনোভেশন সেন্টারের একজন ফলিত বিজ্ঞানী, যেখানে তিনি AWS গ্রাহকদের জন্য জেনারেটিভ এআই সলিউশন নিয়ে গবেষণা করেন এবং তৈরি করেন। তিনি খেলাধুলা এবং মিডিয়া এবং বিনোদন শিল্পগুলিতে মনোনিবেশ করেন এবং অতীতে বিভিন্ন ক্রীড়া লীগ, দল এবং সম্প্রচারকারীদের সাথে কাজ করেছেন। তার অবসর সময়ে, তিনি টেনিস এবং গল্ফ খেলতে পছন্দ করেন।
![]() ত্র্যম্বক গঙ্গোপাধ্যায় তিনি AWS জেনারেটিভ এআই ইনোভেশন সেন্টারের একজন ফলিত বিজ্ঞানী, যেখানে তিনি শিল্পের বিভিন্ন বর্ণালী জুড়ে সংস্থাগুলির সাথে সহযোগিতা করেন। গুরুত্বপূর্ণ ব্যবসায়িক চ্যালেঞ্জ মোকাবেলা করতে এবং এআই গ্রহণকে ত্বরান্বিত করতে গবেষণা পরিচালনা এবং জেনারেটিভ এআই সমাধান তৈরি করা তার ভূমিকা জড়িত।
ত্র্যম্বক গঙ্গোপাধ্যায় তিনি AWS জেনারেটিভ এআই ইনোভেশন সেন্টারের একজন ফলিত বিজ্ঞানী, যেখানে তিনি শিল্পের বিভিন্ন বর্ণালী জুড়ে সংস্থাগুলির সাথে সহযোগিতা করেন। গুরুত্বপূর্ণ ব্যবসায়িক চ্যালেঞ্জ মোকাবেলা করতে এবং এআই গ্রহণকে ত্বরান্বিত করতে গবেষণা পরিচালনা এবং জেনারেটিভ এআই সমাধান তৈরি করা তার ভূমিকা জড়িত।
- এসইও চালিত বিষয়বস্তু এবং পিআর বিতরণ। আজই পরিবর্ধিত পান।
- PlatoData.Network উল্লম্ব জেনারেটিভ Ai. নিজেকে ক্ষমতায়িত করুন। এখানে প্রবেশ করুন.
- প্লেটোএআইস্ট্রিম। Web3 ইন্টেলিজেন্স। জ্ঞান প্রসারিত. এখানে প্রবেশ করুন.
- প্লেটোইএসজি। কার্বন, ক্লিনটেক, শক্তি, পরিবেশ সৌর, বর্জ্য ব্যবস্থাপনা. এখানে প্রবেশ করুন.
- প্লেটো হেলথ। বায়োটেক এবং ক্লিনিক্যাল ট্রায়াল ইন্টেলিজেন্স। এখানে প্রবেশ করুন.
- উত্স: https://aws.amazon.com/blogs/machine-learning/ball-position-tracking-in-the-cloud-with-the-pga-tour/
- : আছে
- : হয়
- :না
- :কোথায়
- $ ইউপি
- 1
- 10
- 100
- 4k
- 4K ক্যামেরা
- 50
- a
- ক্ষমতা
- সক্ষম
- সম্পর্কে
- দ্রুততর করা
- সঠিকতা
- সঠিক
- অর্জনের
- দিয়ে
- আসল
- প্রকৃতপক্ষে
- যোগ
- ঠিকানা
- গ্রহণ
- সুবিধা
- পর
- AI
- এআই গ্রহণ
- সব
- অনুমতি
- অনুমতি
- বরাবর
- এছাড়াও
- যদিও
- মর্দানী স্ত্রীলোক
- অ্যামাজন ওয়েব সার্ভিসেস
- an
- এবং
- কৌণিক
- অন্য
- কোন
- যে কেউ
- আপাত
- চেহারাগুলো
- মনে হচ্ছে,
- ফলিত
- আনুমানিক
- স্থাপত্য
- রয়েছি
- এলাকায়
- কাছাকাছি
- AS
- পরিমাপ করা
- মূল্যায়ন
- At
- স্বয়ংক্রিয়ভাবে
- এড়াতে
- ডেস্কটপ AWS
- পটভূমি
- বল
- BE
- কারণ
- হয়েছে
- আগে
- হচ্ছে
- উত্তম
- মধ্যে
- তার পরেও
- নীল
- উভয়
- পাদ
- বক্স
- বক্স
- আনে
- তৈরী করে
- ব্যবসায়
- কিন্তু
- by
- ক্যামেরা
- ক্যামেরা
- CAN
- বাহিত
- নির্ঝর
- কেস
- মামলা
- কেন্দ্র
- কিছু
- চ্যালেঞ্জ
- পরিবর্তন
- শ্রেণী
- ক্লাস
- শ্রেণীবিন্যাস
- শ্রেণীবদ্ধ
- শ্রেণীভুক্ত করা
- ক্লিপ্স
- ঘনিষ্ঠভাবে
- কাছাকাছি
- মেঘ
- ক্লাব
- সিএনএন
- সহযোগিতা
- জটিল
- উপাদান
- উপাদান
- অংশীভূত
- গনা
- কম্পিউটার
- কম্পিউটার ভিশন
- আবহ
- বিশ্বাস
- বিশৃঙ্খলা
- গঠিত
- চলতে
- একটানা
- একটানা
- কনভোলশনাল নিউরাল নেটওয়ার্ক
- সঠিকভাবে
- সম্পর্কযুক্তরূপে
- অনুরূপ
- পারা
- কঠোর
- কাপ
- বর্তমান
- এখন
- গ্রাহকদের
- কাটা
- উপাত্ত
- দিন
- দিন
- গভীর
- প্রদান করা
- প্রদর্শিত
- বর্ণনা করা
- বর্ণিত
- নকশা
- পরিকল্পিত
- সত্ত্বেও
- সনাক্তকরণ
- নির্ধারণ
- নির্ধারণ করে
- বিকাশ
- উন্নত
- উন্নয়নশীল
- উন্নয়ন
- বিভিন্ন
- কঠিন
- সরাসরি
- আলোচনা
- দূরত্ব
- বিচিত্র
- নিচে
- অঙ্কন
- কারণে
- সময়
- প্রতি
- প্রতিটি ব্যক্তি
- পূর্বে
- সহজে
- কার্যকারিতা
- পারেন
- শেষ
- উন্নত করা
- যথেষ্ট
- বিনোদন
- সমগ্র
- থার (eth)
- মূল্যায়ন
- এমন কি
- ঘটনা
- প্রতি
- উদাহরণ
- উদাহরণ
- বিস্তৃতি
- প্রত্যাশিত
- অভিজ্ঞতা
- অভিজ্ঞতা
- অন্বেষণ করুণ
- নির্যাস
- ব্যর্থতা
- মিথ্যা
- ফ্যান
- ভক্ত
- দ্রুত
- প্রতিপালন
- কম
- ক্ষেত্র
- ব্যক্তিত্ব
- চূড়ান্ত
- আবিষ্কার
- আবিষ্কার
- গুরুত্ত্ব
- অনুসরণ
- জন্য
- ফর্ম
- পাওয়া
- চার
- ফ্রেম
- ঘনঘন
- থেকে
- ক্রিয়া
- অধিকতর
- ভবিষ্যৎ
- খেলা
- সৃজক
- জেনারেটিভ এআই
- প্রদত্ত
- গলফ
- জিপিএস
- অতিশয়
- Green
- স্থল
- হাত
- আছে
- he
- মাথা
- সাহায্য
- উচ্চ
- ঊর্ধ্বতন
- তার
- ঐতিহাসিক
- অধিষ্ঠিত
- গর্ত
- কিভাবে
- HTTP
- HTTPS দ্বারা
- প্রকাশ
- ভাবমূর্তি
- চিত্র
- অবিলম্বে
- গুরুত্বপূর্ণ
- উন্নত করা
- উন্নত
- in
- অন্তর্ভুক্ত করা
- সুদ্ধ
- শিল্প
- তথ্য
- প্রারম্ভিক
- প্রাথমিকভাবে
- ইনোভেশন
- ইনপুট
- উদাহরণ
- সংহত
- মজাদার
- অন্তর্বর্তী
- মধ্যে
- জড়িত
- IT
- এর
- কাজ
- JPG
- লেবেল
- লেবেলগুলি
- বৃহত্তর
- সর্বশেষে
- অদৃশ্যতা
- লিগ
- শিক্ষা
- বাম
- কম
- মত
- সম্ভবত
- পছন্দ
- জীবিত
- অবস্থান
- অবস্থানগুলি
- যুক্তিবিদ্যা
- মেশিন
- মেশিন লার্নিং
- করা
- ম্যানুয়ালি
- অনেক
- ছাপ
- মিলেছে
- জরায়ু
- মে..
- মাপ
- পরিমাপ
- মিডিয়া
- পদ্ধতি
- মিস্
- ML
- মডেল
- মডেল
- মডুলার
- মডিউল
- মডিউল
- অধিক
- গতি
- সরানো হয়েছে
- প্যাচসমূহ
- চলন্ত
- বহু
- অবশ্যই
- কাছাকাছি
- অগত্যা
- প্রয়োজনীয়
- নেটওয়ার্ক
- নেটওয়ার্ক
- নিউরাল
- স্নায়বিক নেটওয়ার্ক
- নিউরাল নেটওয়ার্ক
- স্নায়ুবিজ্ঞান
- পরবর্তী
- পরবর্তী প্রজন্ম
- বিঃদ্রঃ
- সংখ্যা
- লক্ষ্য
- বস্তু
- মান্য করা
- of
- প্রায়ই
- on
- একদা
- ONE
- অপ্টিমাইজেশান
- or
- কমলা
- ক্রম
- সংগঠন
- অন্যান্য
- বাইরে
- রূপরেখা
- আউটপুট
- আউটপুট
- শেষ
- সামগ্রিক
- সমান্তরাল
- গত
- পথ
- সম্প্রদায়
- প্রতি
- সম্পাদন করা
- কর্মক্ষমতা
- সম্পাদিত
- সম্ভবত
- ব্যক্তি
- পিজিএ ট্যুর
- পাইপলাইন
- পিক্সেল
- স্থাননির্ণয়
- জায়গা
- Plato
- প্লেটো ডেটা ইন্টেলিজেন্স
- প্লেটোডাটা
- খেলা
- খেলোয়াড়
- খেলোয়াড়দের
- বিন্দু
- পয়েন্ট
- অবস্থান
- স্থান
- অবস্থানের
- ধনাত্মক
- সম্ভব
- সম্ভবত
- পোস্ট
- চালিত
- ভবিষ্যদ্বাণী করা
- পূর্বাভাস
- প্রধানমন্ত্রী
- আগে
- সম্ভাবনা
- সমস্যা
- প্রক্রিয়া
- প্রদত্ত
- অনুগমন
- স্থাপন
- পরিসর
- কাঁচা
- মূল তথ্য
- প্রকৃত সময়
- রিয়েল-টাইম ডেটা
- সাম্প্রতিক
- নথিভুক্ত
- লাল
- পড়ুন
- প্রতিফলন
- প্রয়োজন
- প্রয়োজনীয়
- প্রয়োজন
- গবেষণা
- গবেষণার
- সমাধান
- যথাক্রমে
- বিশ্রাম
- বিশ্রামের
- সীমাবদ্ধ করা
- ফলে এবং
- ফলাফল
- ভূমিকা
- চালান
- দৌড়
- ঋষি নির্মাতা
- একই
- দৃশ্য
- বিজ্ঞানী
- স্কোরিং
- সার্চ
- অনুসন্ধানের
- দ্বিতীয়
- ক্রম
- সেবা
- সেট
- শট
- প্রদর্শনী
- প্রদর্শিত
- শো
- সহজ
- কেবল
- একক
- আয়তন
- ছোট
- So
- সলিউশন
- কিছু
- বর্ণালী
- বিজ্ঞাপন
- শুরু
- শুরু হচ্ছে
- শুরু
- ধাপ
- প্রারম্ভিক ব্যবহারের নির্দেশাবলী
- স্টোরেজ
- সঞ্চিত
- স্ট্রিমিং
- সফলভাবে
- পদ্ধতি
- গ্রহণ করা
- লক্ষ্যমাত্রা
- দল
- প্রযুক্তি
- টেনিস
- প্রমাণিত
- চেয়ে
- যে
- সার্জারির
- ভবিষ্যৎ
- বিশ্ব
- তাদের
- তারপর
- সেখানে।
- এইগুলো
- তারা
- তৃতীয়
- এই
- পুঙ্খানুপুঙ্খভাবে
- তিন
- গোবরাট
- থ্রুপুট
- সময়
- টাইমস্ট্যাম্প
- থেকে
- শীর্ষ
- মোট
- সফর
- টুর্নামেন্ট
- দিকে
- পথ
- অনুসরণকরণ
- রেলগাড়ি
- প্রশিক্ষিত
- প্রশিক্ষণ
- রুপান্তর
- ট্রিগার
- সত্য
- আদর্শ
- পরিণামে
- বোধগম্য
- দুর্ভাগ্যবশত
- us
- ব্যবহার
- ব্যবহৃত
- ব্যবহারসমূহ
- ব্যবহার
- সাধারণত
- মানগুলি
- বিভিন্ন
- মাধ্যমে
- ভিডিও
- চেক
- মতামত
- দৃশ্যমান
- দৃষ্টি
- চাক্ষুষ
- চেয়েছিলেন
- ছিল
- we
- ওয়েব
- ওয়েব সার্ভিস
- আমরা একটি
- ছিল
- কখন
- যেহেতু
- কিনা
- যে
- সাদা
- হু
- ব্যাপক
- প্রশস্ত পরিসর
- ইচ্ছা
- সঙ্গে
- মধ্যে
- ছাড়া
- কাজ করছে
- কাজ
- বিশ্ব
- would
- Yolo
- zephyrnet