আরটিকে ড্রোন এলিভেশন মানচিত্রের এটিভি / এসএক্সএস সংগ্রহিত শীর্ষে তুলনা করা


গ্রীন অ্যারো টেক-এ আমরা প্রায়শই সংগ্রহের অন্যান্য পদ্ধতির তুলনায় আমাদের ডেটা পাই। এটি সর্বজনীন LiDAR, মনুষ্যযুক্ত ফটোগ্রামমেট্রি, মনুষ্য জরিপ পদ্ধতি, বা ট্রাক্টর/ট্রাক/কোয়াডের মতো ড্রাইভিং সংগ্রহের পদ্ধতি। এই সব তাদের জায়গা আছে, এবং সঠিক করা হয়েছে, তারা সব সঠিক হতে পারে. আমাদের লক্ষ্য হল সবাইকে সঠিক তথ্য দেওয়া অত্যন্ত কম দাম. বছরের পর বছর ধরে কর্মক্ষম দক্ষতার কারণে, গ্রীন অ্যারো টেক অর্থনৈতিকভাবে মূল্যের সঠিক উচ্চতা অফার করতে সক্ষম হয়েছে, এটি সঠিক বলে বিশ্বাস করা কঠিন। আমাদের লক্ষ্য সেইসব মিথ দূর করা।
এই নির্দিষ্ট তুলনা আমাদের UAV (ড্রোন) ভিত্তিক ডেটার মধ্যে, বাণিজ্যিক গ্রেডের RTK সজ্জিত UAV ব্যবহার করে ডেটা সংগ্রহ এবং প্রক্রিয়াকরণ উভয়ের জন্য গ্রীন এয়ারো টেকের সর্বোত্তম অনুশীলন এবং এটিকে ঠিকাদারের কোয়াড ব্যবহার করে সংগ্রহ করা ডেটার সাথে তুলনা করা।
তাই এর মধ্যে ডুব দেওয়া যাক!
এই প্রক্রিয়ার মধ্যে ঠিকাদারদের শেপফাইল আনার অন্তর্ভুক্ত ছিল যেমনটি ফিল্ড চালানো থেকে সংগৃহীত, পয়েন্ট থেকে একটি পৃষ্ঠ গ্রিড তৈরি করা, এবং তারপর ড্রোন ডিজিটাল সারফেস মডেলের (DSM) সাথে তুলনা করা। যেহেতু শেফফাইলটিতে ভিজ্যুয়াল চিত্র নেই, তাই আমরা এটিকে X/Y দ্বারা সিঙ্ক্রোনাইজ করতে পারিনি, তবে আমরা ঠিকাদারদের তৈরি করা পৃষ্ঠের সাথে খুব ঘনিষ্ঠভাবে মেলে আমাদের উচ্চতা অফসেট করতে সক্ষম হয়েছি।
টপোগ্রাফিক তুলনা
তুলনা করা হলে, এই পরবর্তী চিত্রটি দুটি স্তরের মধ্যে পার্থক্য দেখায়। সবুজ = ±5 সেমি বা কম পার্থক্য (ভাল), এবং লাল = +5 সেমি পার্থক্যের বেশি (ড্রোন স্তরের চেয়ে স্থল স্তর উচ্চতর), নীল = -5 সেন্টিমিটারের চেয়ে বেশি (ড্রোন স্তরের চেয়ে স্থল স্তর নীচে)। এটা স্পষ্ট যে গ্রাউন্ড লেয়ারটি বাড়ির গজগুলিতে নীল (নিম্ন) উচ্চতা নির্দেশ করবে, যেহেতু কোনও ডেটা নেই এবং এটি ইন্টারপোলেটেড, যেখানে ড্রোনটি প্রকৃত পৃষ্ঠের উচ্চতা অনেক বেশি দেখায়। যেহেতু পার্থক্য স্তরটি প্রাথমিকভাবে সবুজ, এটি ইঙ্গিত করে যে দুটি স্তর বেশিরভাগ ক্ষেত্রে ±5 সেমি বা তার চেয়ে কম, যা খুব ভাল এবং প্রত্যাশিত।
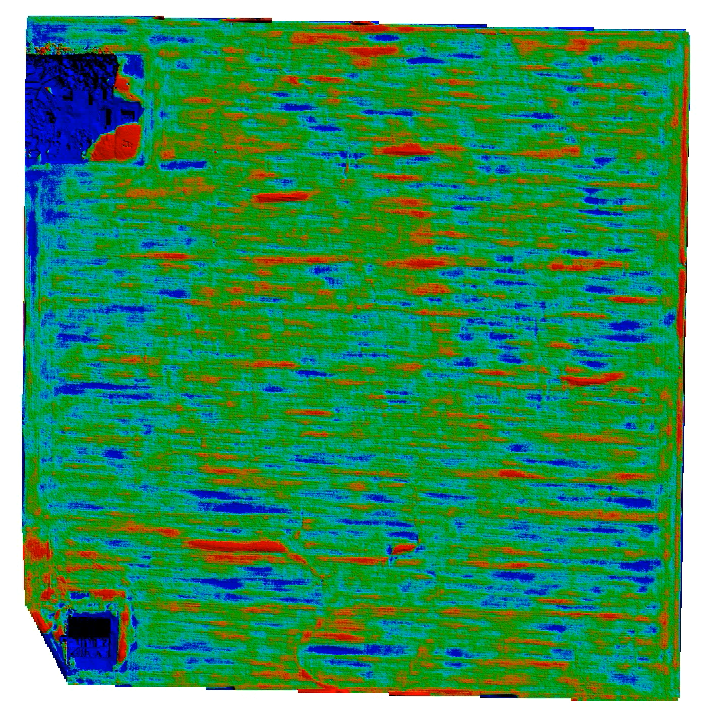
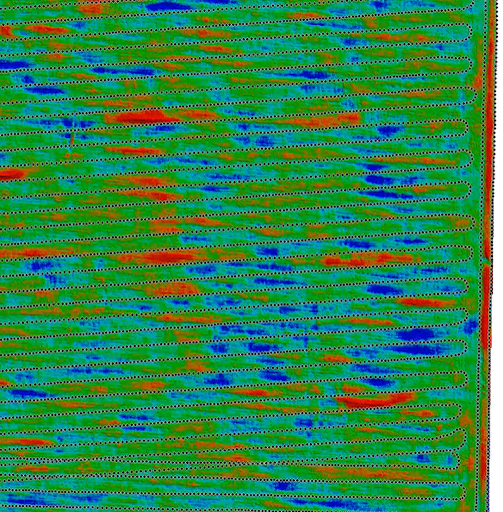
পার্থক্য স্তরে আবৃত গ্রাউন্ড পয়েন্ট (ডট) এর কাছাকাছি তাকানো দেখায় যে স্থল ডেটার দুটি সোয়াথ লাইনের মধ্যে ব্যবধান যেখানে পার্থক্য দেখা দেয়, তাই এটি ইন্টারপোলেশন প্রভাব যা বেশিরভাগ লাল/নীল তৈরি করছে, কারণ পয়েন্টগুলি আসলে যেখানে ড্রোন ডেটা পরিমাপের সাথে একমত।
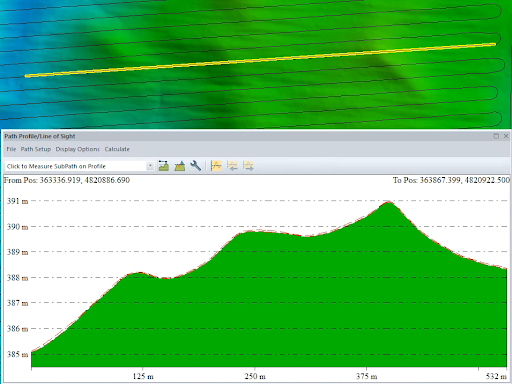
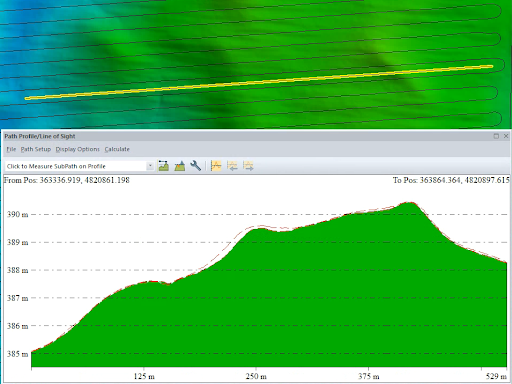
গ্রাউন্ড টপো লাইন বরাবর একটি প্রোফাইল দেখে, আমরা ড্রোন ডেটা লাইনগুলিকে খুব ভালভাবে দেখতে পারি (প্রোফাইল চার্টে সবুজ) ইন্টারপোলেটেড গ্রাউন্ড লাইনে (প্রোফাইল চার্টে লাল)।
গ্রাউন্ড সংগ্রহের মতো একই পয়েন্টে আমরা কতটা নির্ভুল তা সম্পর্কে আরও ভাল ধারণা পেতে, আমরা ড্রোন থেকে উচ্চতার ডেটা নিয়েছি এবং গ্রাউন্ড টোপোতে যেখানে ডেটা রয়েছে সেই একই পয়েন্টের অবস্থানে নমুনা তৈরি করেছি। তারপরে এক্সেলে আমরা এই দুটি মান তুলনা করেছি (একই স্থানাঙ্কে SVT বনাম ড্রোন-বিবৃত উচ্চতা থেকে নির্দেশিত মূল উচ্চতা) এবং কিছু পরিসংখ্যান নিয়ে এসেছি। চেক করা 11,000 গ্রাউন্ড পয়েন্ট জুড়ে, উভয়ের মধ্যে গড় ছিল ±2.5 সেমি পার্থক্য, যা আমাদের ±5.0 সেমি জেডের স্বাভাবিক বিবৃত নির্ভুলতার চেয়ে ভাল। মধ্যম মানটি আসলে ±2.1 সেমি জেড ছিল, মাত্র কয়েকটি % আমাদের বাইরে ছিল প্রত্যাশিত পরিসীমা, তাই খুব ইতিবাচক ফলাফল. সংযুক্ত XLS-এ এই তুলনাতে ব্যবহৃত সমস্ত ডেটা রয়েছে।

গ্রাউন্ড লাইনের মধ্যে প্রোফাইলিং হল যেখানে আমরা আউটপুট স্তরগুলির মধ্যে কিছু ভিন্নতা দেখতে পাই, বিশেষ করে যেখানে টপোগ্রাফিতে ছোট বৈশিষ্ট্য রয়েছে। বেশিরভাগ ক্ষেত্রে এই পার্থক্যগুলি খুব বেশি তাৎপর্যপূর্ণ হওয়ার সম্ভাবনা নেই।
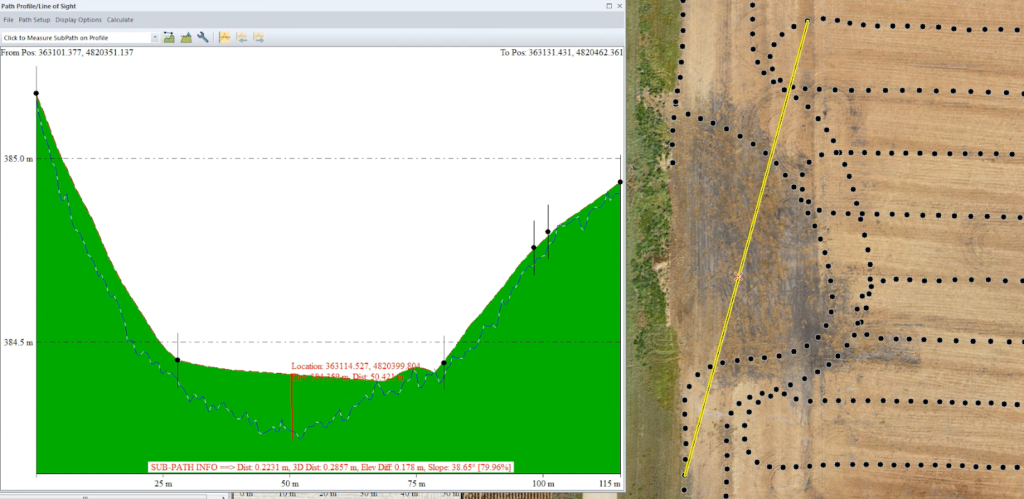
কিন্তু আমরা যদি ক্রস-প্রোফাইলকে স্থল রেখার সাথে লম্বভাবে দেখি, তাহলে আমরা দেখতে পাব কোথায় প্রশস্ত স্থলভাগের (কালো বিন্দু) ইন্টারপোলেশন (লাল রেখা) ছোট বৈশিষ্ট্যগুলি মিস করে এবং ড্রোন স্তরের (সবুজ) তুলনায় উচ্চতায় একটি উল্লেখযোগ্য পার্থক্য দেখায়।

ড্রেনেজ মডেল তুলনা
বেশিরভাগ অংশের জন্য, এটি সামগ্রিক নিষ্কাশন প্রতিবেদনের জন্য মোটামুটি বেমানান হতে পারে যদি না পৃষ্ঠের নিষ্কাশনের দিকে বিশুদ্ধভাবে না দেখা যায়। কিন্তু একটি মজার বিষয় যা আমরা এই প্রকল্পে উল্লেখ করেছি তা হল যে (আপাতদৃষ্টিতে) ক্ষেত্রের পশ্চিম দিকে চিহ্নিত আউটলেটে (লাল তীর) একটি কালভার্ট রয়েছে যা প্রকৃতপক্ষে সঠিক দিকটি বের করে না, বা অন্যথায় খুব বেশি যে পশ্চিম দিকে মাঠ বন্ধ নিষ্কাশন উচ্চতা. নীচের স্ক্রিনশটে, বাম দিকে গ্রীন অ্যারো পোর্টাল ড্রেনেজ রিপোর্ট দেখায় গ্রাউন্ড সারফেস ফাইলের উপর ভিত্তি করে (গ্রাউন্ড পয়েন্ট থেকে তৈরি), আপনি দেখতে পাচ্ছেন সেখানে 7-8টি তুলনামূলকভাবে ছোট "সিঙ্ক" এলাকা হাইলাইট করা হয়েছে, কারণ এটি অনুমান করা হয়েছে ( উপলভ্য ডেটার পরিধি থেকে) যে জল পশ্চিম দিকে সহজেই নিষ্কাশন করবে। যাইহোক, রাস্তার অপর পাশে (এবং কালভার্টের অন্য প্রান্তে) একটি পরিমাপ আছে এমন ড্রোন স্তরের দিকে তাকালে, এটি স্পষ্টভাবে প্রতীয়মান হয় যে প্রবাহকে সঠিক দিকে নিয়ে যাওয়ার জন্য সেই খাদে কাজ করতে হবে অন্যথায় এটি দক্ষিণ-পশ্চিম কোণে একটি বাধা এবং "সিঙ্ক" জল হবে। অবশ্যই, যেহেতু এটি ড্রোনের একটি সারফেস মডেল, এটি লুকানো কালভার্ট বা অন্যান্য ভূখণ্ডের বৈশিষ্ট্যগুলিকে বিবেচনা করে না যা এই এলাকাগুলির উপর দিয়ে জল নিষ্কাশন করতে দেয়৷ অথবা যদি ভুট্টা ক্ষেতের মধ্য দিয়ে পশ্চিমে একটি জলপথ থাকে, তাহলে উত্তর/দক্ষিণে যাওয়া খাদটি ব্যবহার না করে এটি নিষ্কাশনের জন্য যথেষ্ট হতে পারে।

কালভার্টে এমন গভীরতায় মডেলিং করে যা মাঠের পশ্চিমে পূর্ণ প্রবাহের অনুমতি দেবে, ড্রেনেজ রিপোর্ট পুনরায় চালানোর মাধ্যমে (পোর্টালে কালভার্ট ফুল ফ্লো ম্যাপ) প্রবাহের পথ এবং ডোবা এলাকাগুলির আরও অনেক বেশি অনুরূপ সেট দেখায়, কিন্তু আমাদের সাথে প্রসারিত ডেটাতে আমরা অতিরিক্ত ক্ষেত্রগুলি দেখতে পাই যেগুলি এখনও উদ্বেগের বিষয় হতে পারে (উত্তর-পশ্চিম কোণে, দক্ষিণ কেন্দ্রে) কারণ এই অঞ্চলগুলির অতীতের টপোগ্রাফি (গ্রাউন্ড ডেটা দ্বারা ক্যাপচার করা হয়নি) নির্দেশ করে যে উচ্চতা ক্ষেত্র থেকে অবাধ প্রবাহের অনুমতি দেওয়ার জন্য খুব বেশি হতে পারে। ভিজ্যুয়াল চিত্রের ঘনিষ্ঠ পরিদর্শন করার পরে, এটি সম্ভবত মাঠের দক্ষিণে দাঁড়িয়ে থাকা ভুট্টার কারণে এইভাবে দেখাচ্ছে, তাই সম্ভবত কোনও সমস্যা হবে না।

অবশ্যই, এটি সাধারণভাবে পৃষ্ঠের নিষ্কাশন সম্পর্কে চিন্তা করা, এবং টাইল ইনস্টলেশনের জন্য অত্যধিক প্রাসঙ্গিক নাও হতে পারে, কিন্তু আমরা সবাই জানি, যতটা সম্ভব সারফেস ড্রেনেজ নিয়ন্ত্রণে রাখলে টালি ইনস্টলেশনের খরচ অনেক বেশি সাশ্রয় হবে।
এখানে তুলনা ডেটা থেকে আগ্রহের একটি অতিরিক্ত নোট। যেখানে ভূমি স্পষ্টতই গ্রাউন্ড ইকুইপমেন্টগুলিকে নিরাপদে ড্রাইভ/জরিপ করার জন্য খুব ভেজা ছিল, সেখানে পৃষ্ঠের ইন্টারপোলেশন প্রায় 6 ইঞ্চি (17.8 সেমি) দূরে সরে যায় যা ড্রোন বাতাস থেকে নির্ভুলভাবে ক্যাপচার করতে সক্ষম হয়েছিল। সবুজ = গ্রাউন্ড ক্যাপচার থেকে ইন্টারপোলেটেড সারফেস, ব্লু ড্যাশড লাইন = ড্রোন এলিভেশন সারফেস, কালো বিন্দু হল গ্রাউন্ড ইকুইপমেন্ট থেকে ক্যাপচার পয়েন্ট/লাইন। এলাকার উপর নির্ভর করে এবং যদি এটি একটি আউটলেটের জন্য ব্যবহার করা হচ্ছে, এটি একটি টাইল প্রধান লাইন গভীরতার প্রয়োজনে একটি উল্লেখযোগ্য পার্থক্য করতে পারে।
উপসংহার
উপসংহার হল যে আমাদের ড্রোন এরিয়াল ক্যাপচার স্থল-সংগৃহীত পয়েন্টগুলির সাথে চুক্তিতে খুব সঠিক। গ্রাউন্ড ক্যাপচারের লাইনগুলির মধ্যে তুলনা করার সময় পার্থক্যগুলি দেখা দিতে শুরু করে, কারণ ইন্টারপোলেশন অবশ্যই করা উচিত এবং এটি একটি মসৃণ প্রভাব দেখায় যা ছোট টপোগ্রাফিক বৈশিষ্ট্যগুলিকে আড়াল করতে পারে। যেহেতু আমরা আচ্ছাদিত ভূমির প্রতি বর্গ মিটারে অনেকগুলি পয়েন্ট ক্যাপচার করি, তাই আমরা গ্রাউন্ড ক্যাপচারের মতো একই মাত্রায় এই ইন্টারপোলেশন ত্রুটিগুলি দেখতে পাই না। আমাদের কাছে উচ্চতার প্রতিটি বিন্দুতে স্থানিক এবং অস্থায়ীভাবে প্রাসঙ্গিকভাবে চাক্ষুষ চিত্রের অতিরিক্ত সুবিধা রয়েছে, তাই যদি উচ্চতার ডেটাতে কোনো অসঙ্গতি লক্ষ্য করা যায়, তাহলে কারণ নির্ধারণে সাহায্য করার জন্য এটি দৃশ্যমানভাবে দেখা যেতে পারে। একটি ক্ষেত্রের সম্পূর্ণ নিষ্কাশন মডেলের দিকে তাকালে, শুধুমাত্র চাষকৃত একরের বাইরে ড্রোনের বর্ধিত কভারেজ আউটলেটগুলির সমস্যাগুলির বিষয়ে পরিকল্পনাকারীদের সতর্ক করতে সাহায্য করতে পারে, বিশেষ করে পৃষ্ঠের নিষ্কাশন কার্যক্রমে।
- এসইও চালিত বিষয়বস্তু এবং পিআর বিতরণ। আজই পরিবর্ধিত পান।
- প্লেটোব্লকচেন। Web3 মেটাভার্স ইন্টেলিজেন্স। জ্ঞান প্রসারিত. এখানে প্রবেশ করুন.
- উত্স: https://www.greenaerotech.com/comparing-rtk-drone-elevation-maps-to-atv-sxs-collected-topo/
- 000
- 11
- a
- সক্ষম
- সম্পর্কে
- হিসাব
- সঠিকতা
- সঠিক
- সঠিক
- দিয়ে
- প্রকৃতপক্ষে
- যোগ
- অতিরিক্ত
- চুক্তি
- এয়ার
- সতর্ক
- সব
- এবং
- এলাকায়
- এলাকার
- অধিকৃত
- সহজলভ্য
- গড়
- ভিত্তি
- কারণ
- হচ্ছে
- বিশ্বাস করা
- নিচে
- সুবিধা
- সর্বোত্তম
- সেরা অভ্যাস
- উত্তম
- মধ্যে
- তার পরেও
- কালো
- নীল
- আনয়ন
- গ্রেপ্তার
- মামলা
- কারণ
- কেন্দ্র
- তালিকা
- ঘনিষ্ঠভাবে
- কাছাকাছি
- সংগ্রহ
- ব্যবসায়িক
- তুলনা
- তুলনা
- তুলনা
- উদ্বেগ
- উপসংহার
- ঠিকাদার
- নিয়ন্ত্রণ
- তুল্য
- কোণ
- খরচ
- পারা
- পথ
- কভারেজ
- আবৃত
- নির্মিত
- তৈরি করা হচ্ছে
- উপাত্ত
- স্পষ্টভাবে
- নির্ভর করে
- গভীরতা
- নির্ধারণ
- পার্থক্য
- পার্থক্য
- ডিজিটাল
- অভিমুখ
- বিকিরণ
- না
- Dont
- পরিচালনা
- গুঁজনধ্বনি
- সহজে
- প্রভাব
- দক্ষতা
- উপকরণ
- সজ্জিত
- ত্রুটি
- সবাই
- ঠিক
- সীমা অতিক্রম করা
- সম্প্রসারিত
- প্রত্যাশিত
- নিরপেক্ষভাবে
- বৈশিষ্ট্য
- কয়েক
- ক্ষেত্র
- ফাইল
- প্রবাহ
- বিনামূল্যে
- থেকে
- সম্পূর্ণ
- সাধারণ
- উত্পন্ন
- পাওয়া
- পেয়ে
- দাও
- লক্ষ্য
- চালু
- ভাল
- শ্রেণী
- বৃহত্তর
- Green
- গ্রিড
- স্থল
- কঠিন
- উচ্চতা
- সাহায্য
- গোপন
- লুকান
- উচ্চ
- ঊর্ধ্বতন
- হাইলাইট করা
- ঘর
- কিভাবে
- যাহোক
- HTTPS দ্বারা
- বিপুলভাবে
- ধারণা
- চিহ্নিত
- ভাবমূর্তি
- in
- ইঙ্গিত
- ইঙ্গিত
- স্বার্থ
- মজাদার
- জড়িত
- সমস্যা
- IT
- জানা
- জমি
- স্তর
- সম্ভবত
- লাইন
- লাইন
- অবস্থানগুলি
- দেখুন
- তাকিয়ে
- খুঁজছি
- কম
- প্রধান
- সংখ্যাগুরু
- করা
- অনেক
- মানচিত্র
- মানচিত্র
- ম্যাচ
- সর্বোচ্চ প্রস্থ
- পদ্ধতি
- শটটি
- মডেল
- মূর্তিনির্মাণ
- অধিক
- সেতু
- চলন্ত
- পরবর্তী
- সাধারণ
- সুপরিচিত
- সুস্পষ্ট
- অর্পণ
- অফসেট
- কর্মক্ষম
- অপারেশনস
- মূল
- অন্যান্য
- অন্যভাবে
- কারেন্টের
- বাহিরে
- সামগ্রিক
- অংশ
- বিশেষত
- গত
- জায়গা
- Plato
- প্লেটো ডেটা ইন্টেলিজেন্স
- প্লেটোডাটা
- বিন্দু
- পয়েন্ট
- পোর্টাল
- ধনাত্মক
- সম্ভব
- চর্চা
- প্রাথমিকভাবে
- সমস্যা
- প্রক্রিয়া
- প্রক্রিয়াজাতকরণ
- প্রোফাইল
- প্রকল্প
- প্রকাশ্য
- বিশুদ্ধরূপে
- পরিসর
- লাল
- অপেক্ষাকৃতভাবে
- প্রাসঙ্গিক
- রিপোর্ট
- প্রয়োজন
- ফলাফল
- রাস্তা
- নিরাপদে
- একই
- সংরক্ষণ করুন
- সেট
- শো
- গুরুত্বপূর্ণ
- অনুরূপ
- থেকে
- ছোট
- ক্ষুদ্রতর
- So
- কিছু
- দক্ষিণ
- নির্দিষ্ট
- বর্গক্ষেত্র
- শুরু
- বিবৃত
- পরিসংখ্যান
- এখনো
- যথেষ্ট
- পৃষ্ঠতল
- জরিপ
- গ্রহণ করা
- প্রযুক্তি
- সার্জারির
- ক্ষেত্র
- পশ্চিম
- তাদের
- জিনিস
- চিন্তা
- দ্বারা
- থেকে
- অত্যধিক
- অধীনে
- মূল্য
- মানগুলি
- পানি
- পশ্চিম
- কি
- যে
- ব্যাপক
- ইচ্ছা
- ছাড়া
- হয়া যাই ?
- would
- বছর
- zephyrnet