这篇简短的文章描述了我们为能够远程运行实验而对激光站进行的一些改进。
设置问题
我们的激光故障注入平台由显微镜组成,用于将激光源聚焦到被测设备。 它配备了红外摄像头,可以观察目标芯片的内部结构,并调整激光束形状。 幸运的是,它配备了一个电动载物台,可以通过我们的定制软件应用程序将激光束移动到芯片上。 我们开发的所有工具都在 Linux 操作系统上运行,因此只要您有良好的互联网连接,就可以通过 SSH 连接使用它们。 我们在处理显微镜相机实时图像时遇到了一些延迟问题,我们通过打开 SSH 压缩选项(-C) 默认情况下未启用,并大大减少了所需的流媒体带宽。 尽管如此,当时一些要素仍然需要就地干预:
- 控制摄像头光源:专用设备提供红外光照射芯片,实现摄像头可视化。
- 打开或关闭机械相机快门:此快门是显微镜的一部分,使用激光时必须关闭。
- 更换显微镜物镜:4 个不同的光学物镜安装在机械旋转转台上,可实现不同的显微镜放大倍率。
下面详细介绍了我们如何定制我们的测试台以远程控制快门和光源。 特别是,我们希望限制这些改编的成本,并尽快提供。
控制光源
半导体的硅基板对红外线是半透明的,因此用红外线照相机可以观察到电路的内部结构。 为了使观察成为可能,电路必须用红外光源照明。 我们的激光显微镜配备了专用光源设备,一个 林LA-150CE,它有一个电源开关和一个旋钮来调节光强度,如下图所示。 当激光测试活动开始时,我们通常会关闭光源,因为它可能会干扰组件,尤其是当样品变薄时。

查看设备的后部,我们发现了一个“远程”开关和一个外部连接器。 我们了解到这种光源通过一些过去千年的连接器提供远程控制功能。 网络上几乎找不到文档,但我们在 Hayashi 目录中发现了一个 局域网控制单元 与此光源兼容。 不过这个产品已经停产了。 此外,LAN 连接不是很方便。 在同一目录中,我们找到了光源连接器的规格。 虽然不是很详细,但足以尝试一下。
Hayashi 产品目录中的远程控制引出线: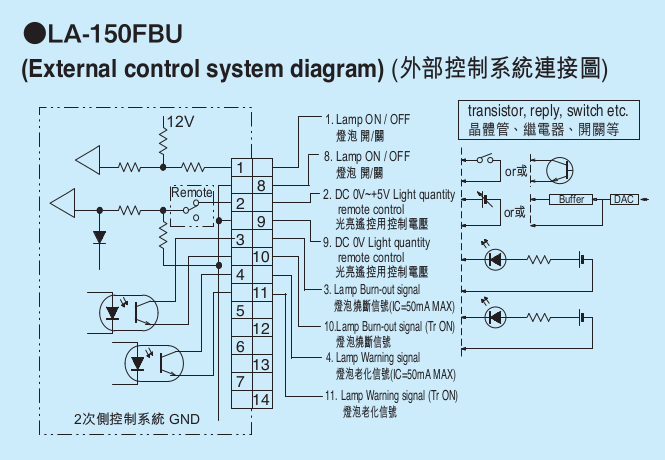
该界面提供了两个主要的有趣功能:
- 数字引脚 1 和 8 可用于通过短接或不短接来打开和关闭灯。 针脚 8 实际上是接地的,所以只有针脚 1 才是真正相关的。
- 模拟引脚 2 使用范围为 0 V(最小强度)到 5 V(最大强度)的信号控制光强度。 当启用远程模式时,前面板电位器被绕过,光强度直接由该引脚控制。
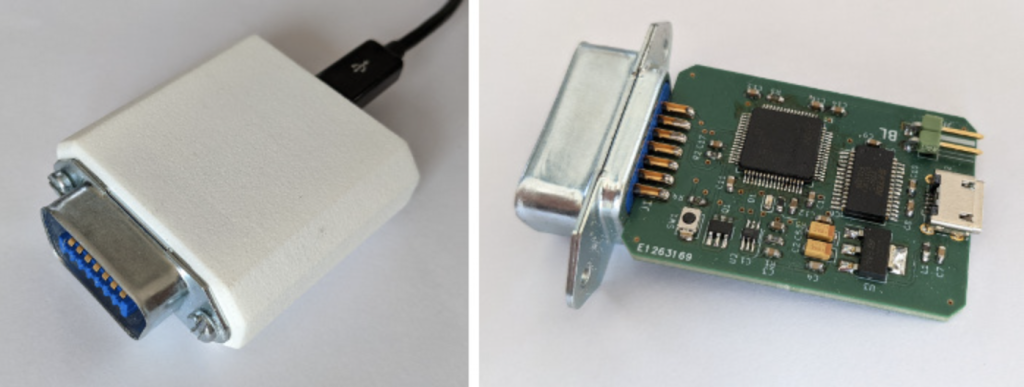
我们决定从头开始构建我们自己的 林灯遥控器 使用以下部分:
- 用于托管嵌入式应用程序代码的 STM32 微控制器,
- 一个 FT232 USB 转串口转换器,允许从 USB 控制加密狗,
- 用于生成 5621 至 0V 模拟信号以控制光强度的 AD5B 数模转换器。
我们设计了PCB使用 KiCad的. 老实说,这个设计可能有点过大:微控制器对于当前的需求来说太大了,并且由于 STM232 设备已经具有 USB 功能,因此可以删除 FT32,代价是软件开发时间。 我们的目标是让它变得快速和肮脏,并重用我们已经设计的一些原理图。
为了好玩,也因为我们相信这是一种非常有前途的语言,我们用 Rust 开发了微控制器固件。
我们最终设计了一个简单的塑料外壳,使用 FreeCAD,并用 造型师.
出乎意料的是,该项目最困难的部分是识别连接器(Amphenol 的参考编号 5710140,用于公端),并且还购买了它,因为它已经过时并且许多供应商不再销售。 零件供应商搜索引擎 八倍体 可以提供帮助。
所有的原理图和设计文件都可以在我们的 GitHub存储库.
控制相机快门
在显微镜中,激光束和照相机共享同一光路。 当激光射击时,一部分光被硅反射并射到相机上。 为防止可能长期导致坏点的传感器损坏,可以关闭相机前面的光学机械快门。 百叶窗是手动的,几乎不需要用力就可以启动。
为了使远程控制成为可能,我们买了一个小型步进电机和一个 Polulu 的 TIC T834 步进电机控制器. 我们开发并打印了 3D 齿轮和安装在显微镜上的主体,以便用电机移动快门。
TIC T834 需要电源为电机提供能量,但由于我们的电机不会消耗大量电流,我们还短接了 T834 的 USB 电源以为电机供电。 TIC 控制器非常容易设置和使用,它有很好的文档记录,我们用我们的软件工具控制电机只花了很少的时间。 我们用 Python 开发了一个微型控制器类,现在集成在我们的 pystages 图书馆。
步进电机控制器需要在上电时找出当前电机的位置。 这是通过初始化程序完成的,在该程序中,电机将旋转,直到接触开关告诉控制器电机处于零位。 我们使用了一个直接连接到内置此功能的 T834 的简单开关。
我们打印的 3D 身体部位不是很准确,两个齿轮在第一时间运行不正确。 利用热量,我们可以稍微弯曲塑料部件以校正齿轮之间的间隙。 经过一些调整,我们能够完美地远程打开和关闭相机快门!
机械设计可在我们的 GitHub存储库.
最后的思考
集成光源和相机快门的控制使我们能够远程运行许多激光测试活动。 它也比以前更方便,因为现在可以在打开激光时自动完成关闭快门和关灯,而以前需要人工干预并且很容易被遗忘。
关于目标炮塔的控制,已经有电动炮塔,但不幸的是它们相当昂贵,而且更换起来可能很棘手。 目前,我们没有找到任何简单且低成本的解决方案。 使用外部电机旋转转塔非常困难,特别是因为当物镜与显微镜对齐时,有一个弹簧将转塔锁定到位。 此外,我们可以添加到电动载物台的重量是有限的。 目前这仍然是一个悬而未决的问题,但它并不妨碍远程工作,我们只是限于选定的放大倍数。
最后,更换损坏的样品仍然需要进入实验室。 幸运的是,这种情况不会经常发生。 我们最终可能会在单个子板上复用许多电路,因此我们可以在需要物理更换之前烧毁一些设备,但我们没有开发这样的解决方案。

- SEO 支持的内容和 PR 分发。 今天得到放大。
- 柏拉图爱流。 Web3 数据智能。 知识放大。 访问这里。
- 与 Adryenn Ashley 一起铸造未来。 访问这里。
- 使用 PREIPO® 买卖 PRE-IPO 公司的股票。 访问这里。
- Sumber: https://www.ledger.com/blog/laser-improvements
- :具有
- :是
- :不是
- :在哪里
- 1
- 14
- 24
- 3d
- 8
- a
- Able
- ACCESS
- 精准的
- 横过
- 通
- 改编
- 加
- 调整
- 后
- 对齐的
- 所有类型
- 让
- 允许
- 已经
- 还
- an
- 和
- 任何
- 再
- 应用领域
- 架构
- 保健
- AS
- At
- 自动
- 可使用
- 带宽
- BE
- 光束
- 因为
- before
- 相信
- 如下。
- 之间
- 大
- 位
- 身体
- 买
- 破
- 建立
- 内建的
- 燃烧
- 但是
- by
- 相机
- 营销活动
- 活动
- CAN
- 能力
- 检索目录
- 芯片
- 程
- 关闭
- 关闭
- 关闭
- 码
- 兼容
- 组件
- 已联繫
- 地都
- 连接方式
- CONTACT
- 控制
- 受控
- 调节器
- 控制
- 控制
- 便捷
- 正确
- 价格
- 可以
- 电流
- 习俗
- 定制
- 死
- 处理
- 决定
- 专用
- 默认
- 设计
- 设计
- 详细
- 开发
- 发达
- 研发支持
- 设备
- 设备
- DID
- 不同
- 难
- 直接
- 文件
- 不
- 完成
- 向下
- 画
- ,我们将参加
- 容易
- 易
- 分子
- 嵌入式
- 启用
- 能源
- 增强
- 更多
- 设备
- 配备
- 特别
- 终于
- 存在
- 存在
- 昂贵
- 实验
- 外部
- 面临
- 故障
- 专栏
- 特征
- 少数
- 档
- 终于
- 找到最适合您的地方
- 姓氏:
- 第一次
- 专注焦点
- 以下
- 针对
- 力
- 被遗忘的
- 幸好
- 发现
- 分数
- 止
- 前
- 开玩笑
- 差距
- 代
- 目标
- 非常好
- 非常
- 陆运
- 发生
- 硬
- 有
- 帮助
- 击中
- 主持人
- 创新中心
- 但是
- HTTPS
- 人
- 确定
- 确定
- 图片
- in
- 集成
- 有趣
- 接口
- 干扰
- 内部
- 网络
- 网络连接
- 介入
- 问题
- 问题
- IT
- 只是
- 实验室
- 语言
- 激光器是如何工作的
- 潜伏
- 延迟问题
- 莱杰
- 自学资料库
- 光
- 极限
- 有限
- Linux的
- 小
- 生活
- 锁
- 长
- 占地
- 廉价
- 制成
- 主要
- 使
- 制作
- 手册
- 许多
- 最大宽度
- 最多
- 可能..
- 机械
- 显微镜
- 千年
- 最低限度
- 时尚
- 时刻
- 更多
- 最先进的
- 电机
- 移动
- 移动
- 必须
- 需求
- 需要
- 没有
- 现在
- 目标
- 目标
- 观察
- 过时的
- of
- 折扣
- 优惠精选
- 经常
- on
- 仅由
- 打开
- 操作
- 操作系统
- 附加选项
- or
- 秩序
- 我们的
- 输出
- 流感大流行
- 面板
- 部分
- 特别
- 部分
- 过去
- 径
- 的
- 射梢类
- 地方
- 塑料
- 平台
- 柏拉图
- 柏拉图数据智能
- 柏拉图数据
- 位置
- 可能
- 帖子
- 功率
- 可编程电源
- 供电
- 防止
- 产品
- 热销产品
- 项目
- 有希望
- 提供
- 提供
- 提供
- 采购
- 蟒蛇
- 快速
- 很快
- 范围
- 真
- 减少
- 反映
- 相应
- 远程
- 去除
- 更换
- 替代
- 必须
- 需要
- 导致
- 重用
- 运行
- 锈
- 同
- 搜索
- 选
- 半导体
- 格局
- 形状
- Share
- 运
- 射击
- 短
- 短路
- 做空
- 侧
- 信号
- 硅
- 简易
- 自
- 单
- 小
- So
- 软件
- 软件开发
- 出售
- 方案,
- 一些
- 不久
- 来源
- 规范
- 纺
- 弹簧
- 阶段
- 开始
- 站
- 仍
- STM32
- 流
- 结构体
- 这样
- 供销商
- 供应
- Switch 开关
- 系统
- 针对
- 告诉
- test
- 测试
- 比
- 这
- 他们
- 那里。
- 因此
- 他们
- Free Introduction
- 那些
- 虽然?
- 通过
- 次
- 至
- 也有
- 了
- 工具
- 尝试
- 转身
- 谈到
- 二
- 下
- 了解
- 不幸
- 直到
- us
- USB
- 使用
- 用过的
- 运用
- 平时
- 非常
- 可视化
- 通缉
- 是
- we
- 卷筒纸
- 重量
- 井
- 为
- ,尤其是
- 这
- 将
- 加工
- 远程工作
- 但
- 您
- 和风网
- 零