乌尔姆大学的研究人员发表了一篇题为“自动驾驶领域合成孔径雷达(SAR)处理的同步定位和建图(SLAM)”的技术论文。
摘要:
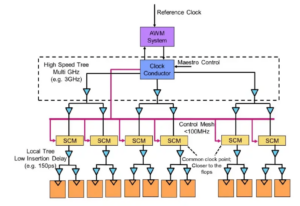
“自动驾驶技术近年来取得了显着进步,彻底改变了交通系统,为更安全、更高效的旅程铺平了道路。开发全自动驾驶汽车的关键挑战之一是对周围环境的准确感知。雷达传感器网络提供强大的环境检测能力。显然,合成孔径雷达(SAR)的原理不仅可以应用于对地观测领域,而且也越来越多地应用于自动驾驶领域。借助安装在车辆上的雷达传感器,可以产生巨大的合成孔径,从而实现高角分辨率,最终获得详细的图像。然而,提高图像质量也会增加对位置精度的要求,从而提高车辆在地图中的定位。由于传统的全球导航卫星系统 (GNSS) 无法在长轨迹上实现毫米范围内的相对定位精度,因此通常采用所谓的同步定位和建图 (SLAM) 算法。本文提出了一种纯粹基于雷达的 SLAM 算法,该算法允许在 77 GHz 汽车频域中进行高分辨率 SAR 处理。所提出的算法通过测量长达 500 m 的轨迹和测量持续时间超过两分钟来进行评估。”
找出 技术论文在这里。 2023 年 XNUMX 月发布。
T. Grebner、R. Riekenbrauck 和 C. Waldschmidt,“自动驾驶领域合成孔径雷达 (SAR) 处理的同步定位和建图 (SLAM)”,载于 IEEE Transactions on Radar Systems,第 2 卷。 47,第 66-2024 页,10.1109 年,doi:2023.3347734/TRS.XNUMX。
相关阅读
自动驾驶需要多少个传感器?
传感器技术仍在不断发展,其功能也存在争议。
为 4 级车辆做好准备
自主可能会出现在 L3+ 的不同阶段。缺少什么,以及需要解决哪些技术和业务挑战。
- :具有
- :是
- :不是
- $UP
- 10
- 2023
- 2024
- 500
- 77
- a
- 精准的
- 实现
- 算法
- 算法
- 允许
- 还
- 和
- 角度方向
- 明显的
- 保健
- At
- 汽车
- 自主性
- 自主车辆
- BE
- 成为
- 作为
- 商业
- 但是
- by
- CAN
- 不能
- 能力
- 能力
- 挑战
- 如何
- 常规
- 创建
- 危急
- 十二月
- 需求
- 详细
- 检测
- 发展
- 不同
- 域
- 驾驶
- 为期
- 地球
- 高效
- 就业
- 环境
- 环境的
- 评估
- 演变
- 部分
- 针对
- 频率
- 充分
- 全球
- 帮助
- 此处
- 高
- 高分辨率
- 但是
- HTTPS
- 巨大
- IEEE
- 图片
- 图片
- in
- 增加
- 增加
- 日益
- IT
- 旅程
- 长度
- Level
- 水平4
- 容易
- 本地化
- 长
- 制成
- 许多
- 地图
- 制图
- 数据监测
- 测量
- 分钟
- 失踪
- 更多
- 更高效
- 旅游导航
- 需求
- 网络
- 全新
- 观察
- 获得
- of
- 经常
- on
- 一
- 仅由
- 打开
- 超过
- 纸类
- 铺路
- 知觉
- 柏拉图
- 柏拉图数据智能
- 柏拉图数据
- 位置
- 呈现
- 礼物
- 原理
- 处理
- 进展
- 提供
- 出版
- 纯粹
- 质量
- R
- 雷达
- 范围
- 最近
- 相对的
- 卓越
- 研究人员
- 分辨率
- 革命性
- 健壮
- 更安全
- 卫星
- 传感器
- 传感器
- 同时
- 自
- 解决
- 实习
- 仍
- 周围
- 合成的
- 产品
- 文案
- 技术
- 专业技术
- 比
- 这
- Free Introduction
- 从而
- 标题
- 至
- 交易
- 交通运输或是
- 二
- 最终
- 大学
- 汽车
- 车辆
- 是
- 方法..
- 这
- 将
- 年
- 和风网