03 年 2023 月 XNUMX 日 (Nanowerk新闻)自 2008 年“软机器人”一词被采用以来,该领域的工程师一直在构建可用于探索、运动、康复甚至太空的各种柔性机器。灵感来源之一:动物在野外移动的方式。
麻省理工学院的一个研究小组更进一步,开发了 软动物园,一个仿生平台,使工程师能够研究软机器人协同设计。该框架优化了包括设计在内的算法,这决定了机器人的外观;和控制,或支持机器人运动的系统,改进用户自动生成潜在机器轮廓的方式。
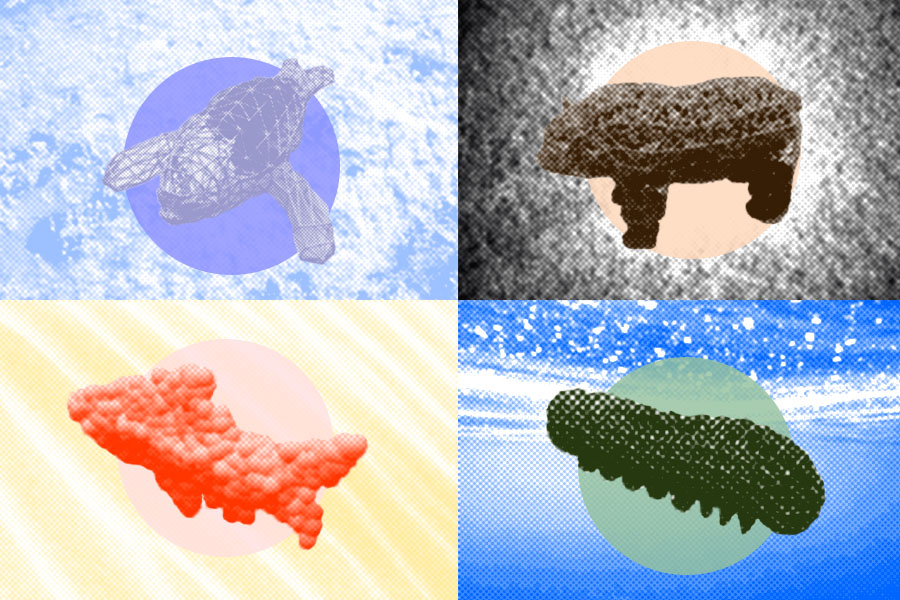 研究人员开发了一种软体机器人协同设计系统,这意味着共同搜索和优化机器人设计——机器人的形状、机器人身体的肌肉位置、机器人不同身体区域的软度;并根据机器人设计,控制其实现目标任务的方式。 (图片来源:Alex Shipps/MIT CSAIL 和研究人员)
在野外漫步时,该平台采用了熊猫、鱼类、鲨鱼和毛毛虫等动物的 3D 模型,作为设计,可以模拟不同环境中的运动、敏捷转弯和路径跟踪等软机器人任务。 无论是在雪地、沙漠、粘土还是水中,该平台都展示了不同地形下各种设计的性能权衡。
“我们的框架可以帮助用户找到机器人形状的最佳配置,使他们能够设计出可以做许多不同事情的软机器人算法,”麻省理工学院计算机科学与人工智能实验室附属机构博士生 Tsun-Hsuan Wang 说。 CSAIL),他是该项目的首席研究员。 “本质上,它可以帮助我们了解机器人与其环境交互的最佳策略。”
SoftZoo 比已经模拟设计和控制的类似平台更全面,因为它模拟了对各种生物群落的物理特征做出反应的运动。 该框架的多功能性来自可微分的多物理引擎,它允许同时模拟物理系统的多个方面,例如在冰上转动的小海豹或在湿地环境中缓慢移动的毛毛虫。 该引擎的可微性通过减少解决计算控制和设计问题所需的通常昂贵的模拟数量来优化协同设计。 因此,用户可以使用更复杂的指定算法来设计和移动软机器人。
该系统模拟与不同地形相互作用的能力说明了形态学的重要性,形态学是研究不同生物体的形状、大小和形式的生物学分支。 根据环境的不同,某些生物结构比其他生物结构更优化,就像比较完成类似任务的机器的蓝图一样。
这些生物轮廓可以激发更专业、针对特定地形的人工生命。 王说:“水母轻微起伏的几何形状使其能够有效地穿越大片水域,激发研究人员开发新型软体机器人,并为完全在计算机中培养的人造生物的能力开辟了无限的可能性。” “此外,蜻蜓可以执行其他飞行生物无法完成的非常敏捷的动作,因为它们翅膀上有特殊的结构,可以在飞行时改变它们的质心。 我们的平台优化了运动,就像蜻蜓自然地更擅长在周围环境中工作一样。”
以前,机器人很难在杂乱的环境中导航,因为它们的身体不适应周围的环境。 不过,通过 SoftZoo,设计人员可以同时开发机器人的大脑和身体,共同优化陆地和水生机器,使其更加具有感知能力和专业性。 随着行为和形态智能的提高,机器人在完成救援任务和进行探索方面将更加有用。 例如,如果有人在洪水期间失踪,机器人可能会更有效地穿越水域,因为它使用 SotftZoo 平台中演示的方法进行了优化。
“SoftZoo 为软体机器人设计者提供开源仿真,帮助他们更轻松、灵活地构建现实世界的机器人,同时加速机器在不同环境中的运动能力,”该研究的合著者、麻省理工学院的研究科学家 Chuang Gan 补充道-IBM Watson AI 实验室,他很快将成为马萨诸塞大学阿默斯特分校的助理教授。
“这种共同设计软体机器人身体及其大脑(即控制器)的计算方法为快速创建专为特定任务设计的定制机器打开了大门,”CSAIL 和安德鲁和麻省理工学院电气工程与计算机科学系 (EECS) 的 Erna Viterbi 教授,也是该作品的另一位作者。
在构建任何类型的机器人之前,该框架可以替代现场测试非自然场景。 例如,对于在波士顿城市平原工作的研究团队来说,评估类似熊的机器人在沙漠中的行为可能具有挑战性。 相反,软机器人工程师可以使用 SoftZoo 中的 3D 模型来模拟不同的设计,并评估控制机器人导航的算法的有效性。 反过来,这将节省研究人员的时间和资源。
尽管如此,当前制造技术的局限性仍然阻碍着这些软机器人设计的实现。 “从模拟机器人到实体机器人的转移仍未解决,需要进一步研究,”王说。 “SoftZoo 中的肌肉模型、空间变化的刚度和传感无法通过当前的制造技术直接实现,因此我们正在努力应对这些挑战。”
未来,该平台的设计者将着眼于人体力学方面的应用,例如操纵,因为它具有测试机器人控制的能力。 为了展示这种潜力,王的团队设计了一个可以向前扔雪球的 3D 手臂。
研究人员开发了一种软体机器人协同设计系统,这意味着共同搜索和优化机器人设计——机器人的形状、机器人身体的肌肉位置、机器人不同身体区域的软度;并根据机器人设计,控制其实现目标任务的方式。 (图片来源:Alex Shipps/MIT CSAIL 和研究人员)
在野外漫步时,该平台采用了熊猫、鱼类、鲨鱼和毛毛虫等动物的 3D 模型,作为设计,可以模拟不同环境中的运动、敏捷转弯和路径跟踪等软机器人任务。 无论是在雪地、沙漠、粘土还是水中,该平台都展示了不同地形下各种设计的性能权衡。
“我们的框架可以帮助用户找到机器人形状的最佳配置,使他们能够设计出可以做许多不同事情的软机器人算法,”麻省理工学院计算机科学与人工智能实验室附属机构博士生 Tsun-Hsuan Wang 说。 CSAIL),他是该项目的首席研究员。 “本质上,它可以帮助我们了解机器人与其环境交互的最佳策略。”
SoftZoo 比已经模拟设计和控制的类似平台更全面,因为它模拟了对各种生物群落的物理特征做出反应的运动。 该框架的多功能性来自可微分的多物理引擎,它允许同时模拟物理系统的多个方面,例如在冰上转动的小海豹或在湿地环境中缓慢移动的毛毛虫。 该引擎的可微性通过减少解决计算控制和设计问题所需的通常昂贵的模拟数量来优化协同设计。 因此,用户可以使用更复杂的指定算法来设计和移动软机器人。
该系统模拟与不同地形相互作用的能力说明了形态学的重要性,形态学是研究不同生物体的形状、大小和形式的生物学分支。 根据环境的不同,某些生物结构比其他生物结构更优化,就像比较完成类似任务的机器的蓝图一样。
这些生物轮廓可以激发更专业、针对特定地形的人工生命。 王说:“水母轻微起伏的几何形状使其能够有效地穿越大片水域,激发研究人员开发新型软体机器人,并为完全在计算机中培养的人造生物的能力开辟了无限的可能性。” “此外,蜻蜓可以执行其他飞行生物无法完成的非常敏捷的动作,因为它们翅膀上有特殊的结构,可以在飞行时改变它们的质心。 我们的平台优化了运动,就像蜻蜓自然地更擅长在周围环境中工作一样。”
以前,机器人很难在杂乱的环境中导航,因为它们的身体不适应周围的环境。 不过,通过 SoftZoo,设计人员可以同时开发机器人的大脑和身体,共同优化陆地和水生机器,使其更加具有感知能力和专业性。 随着行为和形态智能的提高,机器人在完成救援任务和进行探索方面将更加有用。 例如,如果有人在洪水期间失踪,机器人可能会更有效地穿越水域,因为它使用 SotftZoo 平台中演示的方法进行了优化。
“SoftZoo 为软体机器人设计者提供开源仿真,帮助他们更轻松、灵活地构建现实世界的机器人,同时加速机器在不同环境中的运动能力,”该研究的合著者、麻省理工学院的研究科学家 Chuang Gan 补充道-IBM Watson AI 实验室,他很快将成为马萨诸塞大学阿默斯特分校的助理教授。
“这种共同设计软体机器人身体及其大脑(即控制器)的计算方法为快速创建专为特定任务设计的定制机器打开了大门,”CSAIL 和安德鲁和麻省理工学院电气工程与计算机科学系 (EECS) 的 Erna Viterbi 教授,也是该作品的另一位作者。
在构建任何类型的机器人之前,该框架可以替代现场测试非自然场景。 例如,对于在波士顿城市平原工作的研究团队来说,评估类似熊的机器人在沙漠中的行为可能具有挑战性。 相反,软机器人工程师可以使用 SoftZoo 中的 3D 模型来模拟不同的设计,并评估控制机器人导航的算法的有效性。 反过来,这将节省研究人员的时间和资源。
尽管如此,当前制造技术的局限性仍然阻碍着这些软机器人设计的实现。 “从模拟机器人到实体机器人的转移仍未解决,需要进一步研究,”王说。 “SoftZoo 中的肌肉模型、空间变化的刚度和传感无法通过当前的制造技术直接实现,因此我们正在努力应对这些挑战。”
未来,该平台的设计者将着眼于人体力学方面的应用,例如操纵,因为它具有测试机器人控制的能力。 为了展示这种潜力,王的团队设计了一个可以向前扔雪球的 3D 手臂。
研究人员开发了一种软体机器人协同设计系统,这意味着共同搜索和优化机器人设计——机器人的形状、机器人身体的肌肉位置、机器人不同身体区域的软度;并根据机器人设计,控制其实现目标任务的方式。 (图片来源:Alex Shipps/MIT CSAIL 和研究人员)
在野外漫步时,该平台采用了熊猫、鱼类、鲨鱼和毛毛虫等动物的 3D 模型,作为设计,可以模拟不同环境中的运动、敏捷转弯和路径跟踪等软机器人任务。 无论是在雪地、沙漠、粘土还是水中,该平台都展示了不同地形下各种设计的性能权衡。
“我们的框架可以帮助用户找到机器人形状的最佳配置,使他们能够设计出可以做许多不同事情的软机器人算法,”麻省理工学院计算机科学与人工智能实验室附属机构博士生 Tsun-Hsuan Wang 说。 CSAIL),他是该项目的首席研究员。 “本质上,它可以帮助我们了解机器人与其环境交互的最佳策略。”
SoftZoo 比已经模拟设计和控制的类似平台更全面,因为它模拟了对各种生物群落的物理特征做出反应的运动。 该框架的多功能性来自可微分的多物理引擎,它允许同时模拟物理系统的多个方面,例如在冰上转动的小海豹或在湿地环境中缓慢移动的毛毛虫。 该引擎的可微性通过减少解决计算控制和设计问题所需的通常昂贵的模拟数量来优化协同设计。 因此,用户可以使用更复杂的指定算法来设计和移动软机器人。
该系统模拟与不同地形相互作用的能力说明了形态学的重要性,形态学是研究不同生物体的形状、大小和形式的生物学分支。 根据环境的不同,某些生物结构比其他生物结构更优化,就像比较完成类似任务的机器的蓝图一样。
这些生物轮廓可以激发更专业、针对特定地形的人工生命。 王说:“水母轻微起伏的几何形状使其能够有效地穿越大片水域,激发研究人员开发新型软体机器人,并为完全在计算机中培养的人造生物的能力开辟了无限的可能性。” “此外,蜻蜓可以执行其他飞行生物无法完成的非常敏捷的动作,因为它们翅膀上有特殊的结构,可以在飞行时改变它们的质心。 我们的平台优化了运动,就像蜻蜓自然地更擅长在周围环境中工作一样。”
以前,机器人很难在杂乱的环境中导航,因为它们的身体不适应周围的环境。 不过,通过 SoftZoo,设计人员可以同时开发机器人的大脑和身体,共同优化陆地和水生机器,使其更加具有感知能力和专业性。 随着行为和形态智能的提高,机器人在完成救援任务和进行探索方面将更加有用。 例如,如果有人在洪水期间失踪,机器人可能会更有效地穿越水域,因为它使用 SotftZoo 平台中演示的方法进行了优化。
“SoftZoo 为软体机器人设计者提供开源仿真,帮助他们更轻松、灵活地构建现实世界的机器人,同时加速机器在不同环境中的运动能力,”该研究的合著者、麻省理工学院的研究科学家 Chuang Gan 补充道-IBM Watson AI 实验室,他很快将成为马萨诸塞大学阿默斯特分校的助理教授。
“这种共同设计软体机器人身体及其大脑(即控制器)的计算方法为快速创建专为特定任务设计的定制机器打开了大门,”CSAIL 和安德鲁和麻省理工学院电气工程与计算机科学系 (EECS) 的 Erna Viterbi 教授,也是该作品的另一位作者。
在构建任何类型的机器人之前,该框架可以替代现场测试非自然场景。 例如,对于在波士顿城市平原工作的研究团队来说,评估类似熊的机器人在沙漠中的行为可能具有挑战性。 相反,软机器人工程师可以使用 SoftZoo 中的 3D 模型来模拟不同的设计,并评估控制机器人导航的算法的有效性。 反过来,这将节省研究人员的时间和资源。
尽管如此,当前制造技术的局限性仍然阻碍着这些软机器人设计的实现。 “从模拟机器人到实体机器人的转移仍未解决,需要进一步研究,”王说。 “SoftZoo 中的肌肉模型、空间变化的刚度和传感无法通过当前的制造技术直接实现,因此我们正在努力应对这些挑战。”
未来,该平台的设计者将着眼于人体力学方面的应用,例如操纵,因为它具有测试机器人控制的能力。 为了展示这种潜力,王的团队设计了一个可以向前扔雪球的 3D 手臂。
- SEO 支持的内容和 PR 分发。 今天得到放大。
- 柏拉图爱流。 Web3 数据智能。 知识放大。 访问这里。
- 与 Adryenn Ashley 一起铸造未来。 访问这里。
- Sumber: https://www.nanowerk.com/news2/robotics/newsid=62936.php
- :具有
- :是
- :不是
- :在哪里
- $UP
- 10
- 11
- 12
- 8
- 9
- a
- 对,能力--
- 加速
- 横过
- 添加
- 采用
- 联盟
- 敏捷
- AI
- 亚历克斯
- 算法
- 允许
- 允许
- 已经
- an
- 和
- 安德鲁
- 动物
- 另一个
- 任何
- 应用领域
- 的途径
- 保健
- ARM
- 武器
- 人造的
- 人工智能
- AS
- 方面
- 评估
- 助理
- At
- 作者
- 自动
- 母婴
- 基于
- BE
- 熊
- 因为
- 很
- before
- 最佳
- 生物学
- 身体
- 波士顿
- 都
- 大脑
- 大脑
- 分支机构
- 瞻
- 建立
- 建筑物
- by
- CAN
- 不能
- 能力
- 能力
- Center
- 挑战
- 挑战
- 更改
- 合著者
- 购买的订单均
- 比较
- 完成
- 完成
- 兼容
- 全面
- 一台
- 计算机科学
- 开展
- 配置
- 控制
- 控制
- 可以
- 创造
- CSAIL
- 电流
- 定制
- 日期
- 演示
- 证明
- 演示
- 问题类型
- 根据
- 沙漠
- 设计
- 设计
- 设计师
- 设计
- 确定
- 开发
- 发达
- 发展
- 不同
- 副总经理
- 不同
- do
- 门
- 蜻蜓
- 蜻蜓
- ,我们将参加
- 容易
- 有效
- 有效
- 电气工程
- 使
- 发动机
- 工程师
- 工程师
- 完全
- 环境
- 环境中
- 本质
- 评估
- 甚至
- 例子
- 昂贵
- 勘探
- 特征
- 部分
- 找到最适合您的地方
- 柔软
- 洪水
- 飞行
- 以下
- 针对
- 形式
- 向前
- 骨架
- 止
- 进一步
- 未来
- 生成
- 几何
- 特定
- 把握
- 有
- 帮助
- 帮助
- 帮助
- 创新中心
- HTTPS
- 人
- ICE
- if
- 说明
- 图片
- 重要性
- 改善
- in
- 包含
- 增加
- 专题
- 启发
- 鼓舞人心
- 代替
- 房源搜索
- 相互作用
- 互动
- IT
- 它的
- JPG
- 实验室
- 实验室
- 大
- 铅
- 生活
- 喜欢
- 限制
- 看
- 看起来像
- 机
- 操作
- 许多
- 质量
- 美国马萨诸塞州
- 可能..
- 手段
- 机械学
- 方法
- 中间
- 失踪
- 任务
- 麻省理工学院简介
- 模型
- 更多
- 运动
- 移动
- 运动
- 许多
- 导航
- 旅游导航
- 全新
- 数
- 对象
- of
- 经常
- on
- 一
- 开放源码
- 开放
- 打开
- 最佳
- 优化
- 优化
- 追求项目的积极优化
- or
- 其他名称
- 其它
- 我们的
- 大纲
- 径
- 演出
- 性能
- 人
- 的
- 平台
- 平台
- 柏拉图
- 柏拉图数据智能
- 柏拉图数据
- 可能性
- 潜力
- 可能
- 先前
- 问题
- 教授
- 项目
- 提供
- 放
- 急速
- 反应
- 真实的世界
- 实现
- 减少
- 地区
- 复原
- 遗迹
- 必须
- 需要
- 营救
- 研究
- 研究员
- 研究人员
- 资源
- 导致
- 机器人
- 机器人
- 机器人
- 同
- 保存
- 说
- 场景
- 科学
- 科学家
- 搜索
- 几个
- 形状
- 形状
- 鲨鱼
- 侧
- 类似
- 模拟
- 同时
- 自
- 尺寸
- 雪
- So
- 软
- 解决
- 一些
- 不久
- 极致
- 来源
- 太空
- 特别
- 专门
- 具体的
- 指定
- 堆
- 站
- 步
- 仍
- 策略
- 学生
- 研究
- 学习
- 这样
- 系统
- 服用
- 目标
- 任务
- 任务
- 团队
- 技术
- 陆生
- test
- 测试
- 比
- 这
- 未来
- 其
- 他们
- 然后
- 博曼
- 他们
- 事
- Free Introduction
- 虽然?
- 通过
- 投掷
- 次
- 至
- 旅行
- 转
- 谈到
- 类型
- 理解
- 大学
- 无限
- 城市
- us
- 使用
- 用户
- 运用
- 各个
- 非常
- 是
- 水
- 沃特斯
- 沃森
- 方法..
- we
- 为
- 什么是
- ,尤其是
- 是否
- 这
- 而
- WHO
- Wild!!!
- 野生动物
- 将
- 工作
- 加工
- 将
- 和风网