美巡赛继续通过实时数据增强高尔夫体验,让球迷更近距离地了解比赛。为了提供更丰富的体验,他们正在开发下一代球位置跟踪系统,该系统可以自动跟踪球在果岭上的位置。
TOUR 目前使用由 CDW 提供支持的 ShotLink,CDW 是一种一流的评分系统,使用具有现场计算功能的复杂摄像头系统,可以密切跟踪每次击球的开始和结束位置。美巡赛希望探索计算机视觉和机器学习 (ML) 技术,以开发下一代基于云的管道来定位果岭上的高尔夫球。
亚马逊生成式人工智能创新中心 (GAIIC) 在最近的 PGA TOUR 赛事的示例数据集中展示了这些技术的有效性。 GAIIC 设计了一个级联一系列深度卷积神经网络的模块化管道,可以成功地将玩家定位在摄像机视野内,确定哪个玩家正在推杆,并在球向杯子移动时对其进行跟踪。
在这篇文章中,我们描述了该管道的开发、原始数据、包含该管道的卷积神经网络的设计以及对其性能的评估。
时间
美巡赛通过位于一个洞果岭周围的三台 3K 摄像机提供了最近一场比赛的 4 天连续视频。下图显示了经过裁剪和缩放的一台摄像机的帧,以便玩家可以轻松看到推杆。请注意,尽管摄像机分辨率很高,但由于距果岭的距离,球显得很小(通常为 3×3、4×4 或 5×5 像素),并且这种尺寸的目标可能难以准确定位。
![]()
除了摄像机反馈之外,巡回赛还向 GAIIC 提供了每次击球的带注释的得分数据,包括其静止位置的世界位置和时间戳。这使得果岭上的每次推杆可视化,以及提取球员推杆的所有视频剪辑的能力,这些视频剪辑可以被手动标记并用于训练构成管道的检测模型。下图显示了三个摄像机视图以及近似推杆路径叠加(从左上角逆时针方向)。该图钉每天都会移动,其中第 1 天对应蓝色,第 2 天对应红色,第 3 天对应橙色。
管道概览
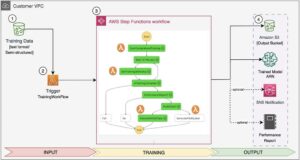
整个系统由训练管道和推理管道组成。下图说明了训练管道的架构。起点是从流媒体模块(如 亚马逊Kinesis 用于实时视频或直接放置到 亚马逊简单存储服务 (Amazon S3)用于历史视频。训练管道需要视频预处理和手动标记图像 亚马逊SageMaker地面真相。模型可以通过以下方式进行训练 亚马逊SageMaker 以及他们的工件存储在 Amazon S3 中。
![]()
推理管道如下图所示,由多个模块组成,这些模块依次从原始视频中提取信息并最终预测静止球的世界坐标。最初,从每个摄像机的较大视野中裁剪果岭,以减少模型必须搜索球员和球的像素区域。接下来,使用深度卷积神经网络(CNN)来查找视野中人物的位置。另一个 CNN 用于预测发现了哪种类型的人,以便确定是否有人要推杆。在视场中定位可能的推杆后,使用相同的网络来预测推杆附近球的位置。第三个 CNN 在球运动过程中跟踪球,最后应用从相机像素位置到 GPS 坐标的转换函数。
![]()
玩家检测
尽管可以以设定的间隔在整个 4K 帧上运行 CNN 进行球检测,但考虑到这些摄像机距离下球的角度大小,任何小的白色物体都会触发检测,从而导致许多误报。为了避免在整个图像帧中搜索球,可以利用球员姿势和球位置之间的相关性。即将投入的球必须位于球员旁边,因此在视野中找到球员将极大地限制探测器必须搜索球的像素区域。
我们能够使用预先训练的 CNN 来预测场景中所有人周围的边界框,如下图所示。不幸的是,果岭上经常有多个球,因此除了简单地找到所有人并搜索球之外,还需要进一步的逻辑。这需要另一个 CNN 来找到当前正在推杆的玩家。
![]()
球员分类和球检测
为了进一步缩小球可能的位置,我们对预先训练的对象检测 CNN (YOLO v7) 进行了微调,以对果岭上的所有人员进行分类。此过程的一个重要组成部分是使用 SageMaker Ground Truth 手动标记一组图像。这些标签使 CNN 能够对推杆选手进行高精度分类。在标记过程中,球也随着球员推杆一起被勾画出来,因此这个 CNN 也能够执行球检测,在推杆之前在球周围绘制一个初始边界框,并将位置信息输入下游的球跟踪 CNN 。
我们使用四种不同的标签来注释图像中的对象:
- 球员推杆 – 持有球杆并处于推杆位置的球员
- 球员不推杆 – 球员不在推杆位置(也可能持有球杆)
- 别人 – 任何其他非玩家的人
- 高尔夫球 – 高尔夫球
下图显示了使用 SageMaker Ground Truth 中的标签对 CNN 进行微调,以对视野中的每个人进行分类。这是很困难的,因为球员、球童和球迷的视觉形象多种多样。当一名球员被归类为推杆后,针对球检测进行微调的 CNN 被应用于该球员周围的小区域。
![]()
球轨迹跟踪
第三个 CNN 是一种针对运动跟踪进行预训练的 ResNet 架构,用于在球被推击后进行跟踪。运动跟踪是一个经过彻底研究的问题,因此该网络在集成到管道中时表现良好,无需进一步微调。
管道输出
级联的 CNN 在人周围放置边界框,对果岭上的人进行分类,检测球的初始位置,并在球开始移动时对其进行跟踪。下图显示了管道的标记视频输出。跟踪并记录球移动时的像素位置。请注意,果岭上的人正在被边界框跟踪和勾勒出轮廓;底部的推杆被正确标记为“球员推杆”,并且正在跟踪移动的球并由一个小的蓝色边界框勾勒出轮廓。
![]()
性能
为了评估管道组件的性能,需要有标记数据。尽管我们提供了球的地面实况世界位置,但我们没有地面实况的中间点,例如球的最终像素位置或玩家推杆的像素位置。通过我们执行的标记工作,我们为管道的这些中间输出开发了地面实况数据,使我们能够衡量性能。
球员分类和球检测准确性
为了检测球员推杆和初始球位置,我们标记了一个数据集并微调了 YOLO v7 CNN 模型,如前所述。该模型将前一个人检测模块的输出分为四类:推杆球员、未推杆球员、其他人和高尔夫球,如下图所示。
![]()
该模块的性能通过混淆矩阵进行评估,如下图所示。对角框中的值显示预测类别与真实标签中的实际类别相匹配的频率。该模型对于每个人类别的召回率为 89% 或更高,对于高尔夫球的召回率为 79%(这是预期的,因为该模型是在人的示例上进行预训练的,而不是在高尔夫球的示例上进行的;这可以通过以下方式改进训练集中有更多标记的高尔夫球)。
![]()
下一步是触发球跟踪器。由于球检测输出是置信概率,因此还可以设置“检测到的球”的阈值并观察结果如何变化,如下图所示。这种方法需要权衡,因为较高的阈值必然会减少误报,但也会错过一些不太确定的球示例。我们测试了 20% 和 50% 置信度的阈值,发现球检测率分别为 78% 和 61%。以此衡量,20% 的阈值较好。这种权衡很明显,对于 20% 置信度阈值,总检测中 80% 实际上是球(20% 误报),而对于 50% 置信度阈值,90% 是球(10% 误报)。对于误报较少的情况,50% 的置信阈值更好。对于更大的训练集,可以使用更多标记数据来改进这两种措施。
![]()
检测管道吞吐量约为每秒 10 帧,因此在当前形式下,单个实例的速度不够快,无法以每秒 50 帧的速度在输入上连续运行。要在球步后实现 7 秒的输出标记,需要进一步优化延迟,例如可以通过并行运行多个版本的管道并通过量化压缩 CNN 模型来实现。
球轨迹跟踪精度
MMTracking 的预训练 CNN 模型运行良好,但也有一些有趣的失败案例。下图显示了跟踪器从球开始,扩展其边界框以包括推杆头和球,然后不幸地跟踪推杆头并忘记球的情况。在这种情况下,推杆头呈现白色(可能是由于镜面反射),因此这种混乱是可以理解的;用于跟踪的标记数据和跟踪 CNN 的微调可能有助于将来改进这一点。
![]()
结论
在这篇文章中,我们讨论了模块化管道的开发,该管道将玩家定位在摄像机视野内,确定哪个玩家正在推球,并在球向杯子移动时对其进行跟踪。
有关 AWS 与 PGA TOUR 合作的更多信息,请参阅 PGA TOUR 与 AWS 合作重新构想球迷体验.
作者简介
![]() 詹姆斯金 是 Amazon Bedrock 的应用科学家,拥有机器学习和神经科学背景。
詹姆斯金 是 Amazon Bedrock 的应用科学家,拥有机器学习和神经科学背景。
![]() 亨利·王 是 Amazon 生成式 AI 创新中心的应用科学家,他在那里为 AWS 客户研究和构建生成式 AI 解决方案。他专注于体育和媒体娱乐行业,过去曾与多个体育联盟、球队和广播公司合作。业余时间,他喜欢打网球和高尔夫球。
亨利·王 是 Amazon 生成式 AI 创新中心的应用科学家,他在那里为 AWS 客户研究和构建生成式 AI 解决方案。他专注于体育和媒体娱乐行业,过去曾与多个体育联盟、球队和广播公司合作。业余时间,他喜欢打网球和高尔夫球。
![]() 特里亚巴克·甘戈帕德耶 是 AWS 生成式 AI 创新中心的应用科学家,他与不同行业的组织合作。他的职责包括开展研究和开发生成式人工智能解决方案,以应对关键的业务挑战并加速人工智能的采用。
特里亚巴克·甘戈帕德耶 是 AWS 生成式 AI 创新中心的应用科学家,他与不同行业的组织合作。他的职责包括开展研究和开发生成式人工智能解决方案,以应对关键的业务挑战并加速人工智能的采用。
- :具有
- :是
- :不是
- :在哪里
- $UP
- 1
- 10
- 100
- 4k
- 4K相机
- 50
- a
- 对,能力--
- Able
- 关于
- 加快
- 准确
- 实现
- 横过
- 实际
- 通
- 增加
- 地址
- 采用
- 优点
- 后
- AI
- 人工智能的采用
- 所有类型
- 让
- 允许
- 沿
- 还
- 尽管
- Amazon
- 亚马逊网络服务
- an
- 和
- 角度方向
- 另一个
- 任何
- 任何人
- 明显的
- 露面
- 出现
- 应用的
- 近似
- 架构
- 保健
- 国家 / 地区
- 围绕
- AS
- 评估
- 评估
- At
- 自动
- 避免
- AWS
- 背景
- 球
- BE
- 因为
- 很
- before
- 作为
- 更好
- 之间
- 超越
- 蓝色
- 都
- 半身裙/裤
- 盒子
- 箱
- 带来
- 建立
- 商业
- 但是
- by
- 相机
- 相机
- CAN
- 进行
- 级联
- 案件
- 例
- Center
- 一定
- 挑战
- 更改
- 程
- 类
- 分类
- 机密
- 分类
- 剪辑
- 密切
- 接近
- 云端技术
- 俱乐部
- 美国有线电视新闻网
- 合作
- 复杂
- 元件
- 组件
- 包括
- 计算
- 一台
- 计算机视觉
- 开展
- 信心
- 混乱
- 由
- 继续
- 连续
- 一直
- 卷积神经网络
- 正确地
- 相关
- 对应
- 可以
- 关键
- 杯
- 电流
- 目前
- 合作伙伴
- 切
- data
- 天
- 一年中的
- 深
- 交付
- 证明
- 描述
- 描述
- 设计
- 设计
- 尽管
- 检测
- 确定
- 确定
- 开发
- 发达
- 发展
- 研发支持
- 不同
- 难
- 直接
- 讨论
- 距离
- 不同
- 向下
- 画
- 两
- ,我们将参加
- 每
- 每个人
- 此前
- 容易
- 效用
- 或
- 结束
- 提高
- 更多
- 娱乐
- 整个
- 醚(ETH)
- 评估
- 甚至
- 活动
- 所有的
- 例子
- 例子
- 展开
- 预期
- 体验
- 体验
- 探索
- 提取
- 失败
- false
- 风扇
- 球迷
- 高效率
- 喂养
- 少
- 部分
- 数字
- 最后
- 找到最适合您的地方
- 寻找
- 重点
- 以下
- 针对
- 申请
- 发现
- 四
- FRAME
- 频繁
- 止
- 功能
- 进一步
- 未来
- 游戏
- 生成的
- 生成式人工智能
- 特定
- 高尔夫球
- GPS
- 非常
- 绿色
- 陆运
- 手
- 有
- he
- 头
- 帮助
- 高
- 更高
- 他的
- 历史的
- 保持
- 穿孔
- 创新中心
- HTTP
- HTTPS
- 说明
- 图片
- 图片
- 立即
- 重要
- 改善
- 改善
- in
- 包括
- 包含
- 行业
- 信息
- 初始
- 原来
- 創新
- 输入
- 例
- 集成
- 有趣
- 中级
- 成
- 涉及
- IT
- 它的
- 工作
- JPG
- 标签
- 标签
- 大
- 最后
- 潜伏
- 联赛
- 学习
- 左
- 减
- 喜欢
- 容易
- 喜欢
- 生活
- 圖書分館的位置
- 地点
- 逻辑
- 机
- 机器学习
- 使
- 手动
- 许多
- 标记
- 匹配
- 矩阵
- 可能..
- 衡量
- 措施
- 媒体
- 方法
- 错过
- ML
- 模型
- 模型
- 模块化
- 模块
- 模块
- 更多
- 运动
- 移动
- 移动
- 移动
- 多
- 必须
- 近
- 一定
- 必要
- 网络
- 网络
- 神经
- 神经网络
- 神经网络
- 神经
- 下页
- 下一代
- 注意
- 数
- 对象
- 对象
- 观察
- of
- 经常
- on
- 一旦
- 一
- 优化
- or
- 橘色
- 秩序
- 组织
- 其他名称
- 输出
- 概述
- 产量
- 输出
- 超过
- 最划算
- 并行
- 过去
- 径
- 员工
- 为
- 演出
- 性能
- 执行
- 也许
- 人
- PGA巡回赛
- 管道
- 像素
- 放置
- 地方
- 柏拉图
- 柏拉图数据智能
- 柏拉图数据
- 播放
- 播放机
- 球员
- 点
- 点
- 位置
- 定位的
- 职位
- 积极
- 可能
- 或者
- 帖子
- 供电
- 预测
- 都曾预测
- 总理
- 以前
- 可能性
- 市场问题
- 过程
- 提供
- 追求
- 把
- 范围
- 原
- 原始数据
- 实时的
- 实时数据
- 最近
- 记录
- 红色
- 参考
- 反射
- 要求
- 必须
- 需要
- 研究
- 研究
- 分辨率
- 分别
- REST的
- 休息
- 限制
- 导致
- 成果
- 角色
- 运行
- 运行
- sagemaker
- 同
- 现场
- 科学家
- 得分
- 搜索
- 搜索
- 其次
- 系列
- 特色服务
- 集
- 射击
- 显示
- 如图
- 作品
- 简易
- 只是
- 单
- 尺寸
- 小
- So
- 解决方案
- 一些
- 光谱
- 运动
- 开始
- 开始
- 启动
- 步
- 步骤
- 存储
- 存储
- 流
- 顺利
- 系统
- 采取
- 目标
- 队
- 技术
- 网球
- 测试
- 比
- 这
- 未来
- 世界
- 其
- 然后
- 那里。
- 博曼
- 他们
- 第三
- Free Introduction
- 透
- 三
- 门槛
- 吞吐量
- 次
- 时间戳
- 至
- 最佳
- 合计
- 教程
- 比赛
- 对于
- 跟踪时
- 跟踪
- 培训
- 熟练
- 产品培训
- 转型
- 触发
- 真相
- 类型
- 最终
- 可理解的
- 不幸
- us
- 使用
- 用过的
- 使用
- 运用
- 平时
- 价值观
- 各个
- 通过
- 视频
- 查看
- 意见
- 可见
- 愿景
- 视觉
- 通缉
- 是
- we
- 卷筒纸
- Web服务
- 井
- 为
- ,尤其是
- 而
- 是否
- 这
- 白色
- WHO
- 宽
- 大范围
- 将
- 中
- 也完全不需要
- 工作
- 合作
- 世界
- 将
- YOLO
- 和风网