29 พฤษภาคม 2023 (ข่าวนาโนเวิร์ค) Researchers from the Department of Mechanical Science and Bioengineering at Osaka University have invented a new kind of walking robot that takes advantage of dynamic instability to navigate. By changing the flexibility of the couplings, the robot can be made to turn without the need for complex computational control systems. This work may assist the creation of rescue robots that are able to traverse uneven terrain.
Most animals on Earth have evolved a robust locomotion system using legs that provides them with a high degree of mobility over a wide range of environments. Somewhat disappointingly, engineers who have attempted to replicate this approach have often found that legged robots are surprisingly fragile. The breakdown of even one leg due to the repeated stress can severely limit the ability of these robots to function.
In addition, controlling a large number of joints so the robot can transverse complex environments requires a lot of computer power. Improvements in this design would be extremely useful for building autonomous or semi-autonomous robots that could act as exploration or rescue vehicles and enter dangerous areas.
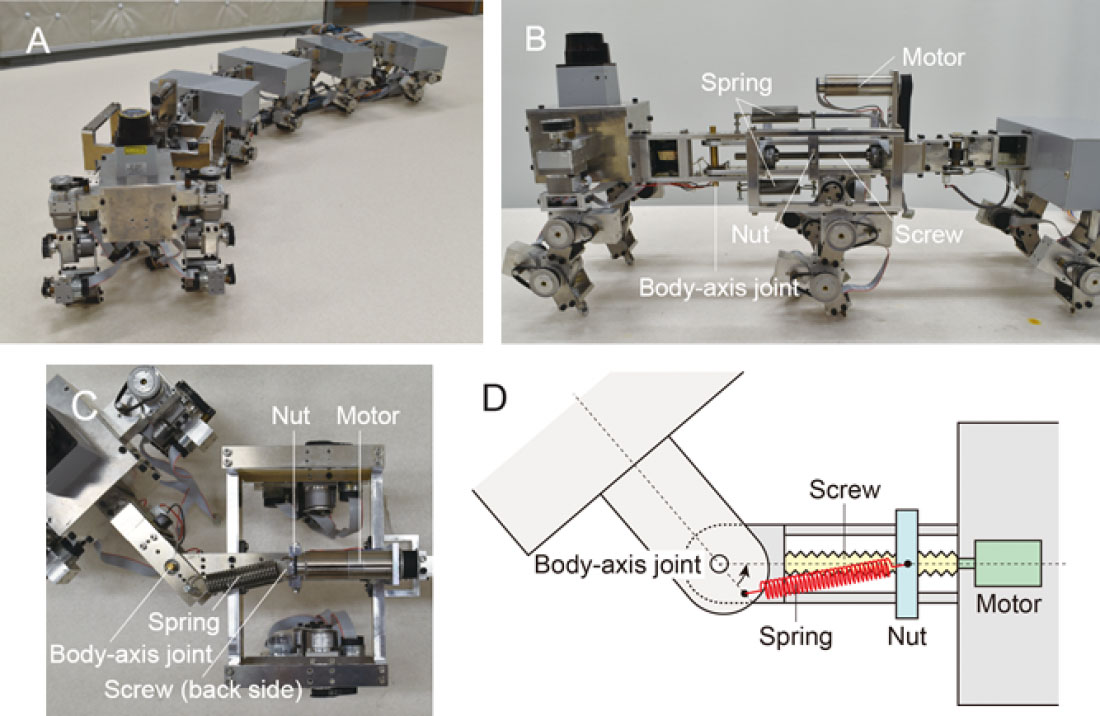 Myriapod robot (A) and Variable body-axis flexibility mechanism (B. Front view, C. Top view, D. Schematics of top view). (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
Now, investigators from Osaka University have developed a biomimetic “myriapod” robot that takes advantage of a natural instability that can convert straight walking into curved motion. In a study published recently in ซอฟท์หุ่นยนต์ (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), researchers from Osaka University describe their robot, which consists of six segments (with two legs connected to each segment) and flexible joints. Using an adjustable screw, the flexibility of the couplings can be modified with motors during the walking motion.
The researchers showed that increasing the flexibility of the joints led to a situation called a “pitchfork bifurcation,” in which straight walking becomes unstable. Instead, the robot transitions to walking in a curved pattern, either to the right or to the left. Normally, engineers would try to avoid creating instabilities. However, making controlled use of them can enable efficient maneuverability.
“We were inspired by the ability of certain extremely agile insects that allows them to control the dynamic instability in their own motion to induce quick movement changes,” says Shinya Aoi, an author of the study. Because this approach does not directly steer the movement of the body axis, but rather controls the flexibility, it can greatly reduce both the computational complexity as well as the energy requirements.
Myriapod robot (A) and Variable body-axis flexibility mechanism (B. Front view, C. Top view, D. Schematics of top view). (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
Now, investigators from Osaka University have developed a biomimetic “myriapod” robot that takes advantage of a natural instability that can convert straight walking into curved motion. In a study published recently in ซอฟท์หุ่นยนต์ (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), researchers from Osaka University describe their robot, which consists of six segments (with two legs connected to each segment) and flexible joints. Using an adjustable screw, the flexibility of the couplings can be modified with motors during the walking motion.
The researchers showed that increasing the flexibility of the joints led to a situation called a “pitchfork bifurcation,” in which straight walking becomes unstable. Instead, the robot transitions to walking in a curved pattern, either to the right or to the left. Normally, engineers would try to avoid creating instabilities. However, making controlled use of them can enable efficient maneuverability.
“We were inspired by the ability of certain extremely agile insects that allows them to control the dynamic instability in their own motion to induce quick movement changes,” says Shinya Aoi, an author of the study. Because this approach does not directly steer the movement of the body axis, but rather controls the flexibility, it can greatly reduce both the computational complexity as well as the energy requirements.
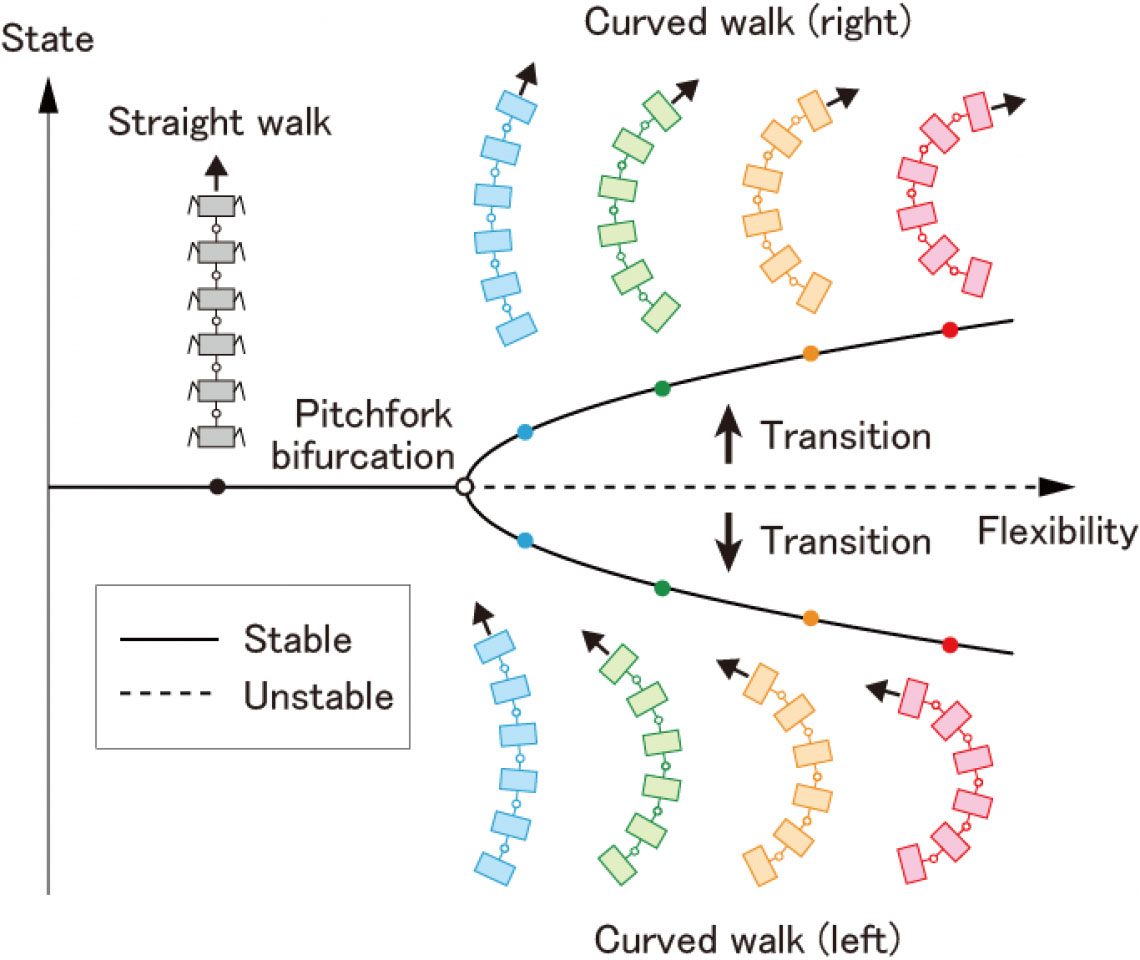 Stable and unstable walking patterns depending on the body-axis flexibility. (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
The team tested the robot’s ability to reach specific locations and found that it could navigate by taking curved paths toward targets. “We can foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments or exploration on other planets,” says Mau Adachi, another study author. Future versions may include additional segments and control mechanisms.
Stable and unstable walking patterns depending on the body-axis flexibility. (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
The team tested the robot’s ability to reach specific locations and found that it could navigate by taking curved paths toward targets. “We can foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments or exploration on other planets,” says Mau Adachi, another study author. Future versions may include additional segments and control mechanisms.
Myriapod robot (A) and Variable body-axis flexibility mechanism (B. Front view, C. Top view, D. Schematics of top view). (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
Now, investigators from Osaka University have developed a biomimetic “myriapod” robot that takes advantage of a natural instability that can convert straight walking into curved motion. In a study published recently in ซอฟท์หุ่นยนต์ (“Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation”), researchers from Osaka University describe their robot, which consists of six segments (with two legs connected to each segment) and flexible joints. Using an adjustable screw, the flexibility of the couplings can be modified with motors during the walking motion.
The researchers showed that increasing the flexibility of the joints led to a situation called a “pitchfork bifurcation,” in which straight walking becomes unstable. Instead, the robot transitions to walking in a curved pattern, either to the right or to the left. Normally, engineers would try to avoid creating instabilities. However, making controlled use of them can enable efficient maneuverability.
“We were inspired by the ability of certain extremely agile insects that allows them to control the dynamic instability in their own motion to induce quick movement changes,” says Shinya Aoi, an author of the study. Because this approach does not directly steer the movement of the body axis, but rather controls the flexibility, it can greatly reduce both the computational complexity as well as the energy requirements.
Stable and unstable walking patterns depending on the body-axis flexibility. (Image: CC BY-NC, 2023, Aoi et al., Soft Robotics)
The team tested the robot’s ability to reach specific locations and found that it could navigate by taking curved paths toward targets. “We can foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments or exploration on other planets,” says Mau Adachi, another study author. Future versions may include additional segments and control mechanisms.
- เนื้อหาที่ขับเคลื่อนด้วย SEO และการเผยแพร่ประชาสัมพันธ์ รับการขยายวันนี้
- เพลโตไอสตรีม. ข้อมูลอัจฉริยะ Web3 ขยายความรู้ เข้าถึงได้ที่นี่.
- การสร้างอนาคตโดย Adryenn Ashley เข้าถึงได้ที่นี่.
- ซื้อและขายหุ้นในบริษัท PRE-IPO ด้วย PREIPO® เข้าถึงได้ที่นี่.
- ที่มา: https://www.nanowerk.com/news2/robotics/newsid=63068.php
- :ไม่
- 10
- 2022
- 2023
- 7
- 8
- 9
- a
- ความสามารถ
- สามารถ
- กระทำ
- นอกจากนี้
- เพิ่มเติม
- ปรับ
- ความได้เปรียบ
- เปรียว
- AL
- ช่วยให้
- an
- และ
- สัตว์
- อื่น
- การใช้งาน
- เข้าใกล้
- เป็น
- พื้นที่
- AS
- ช่วยเหลือ
- At
- พยายาม
- ผู้เขียน
- อิสระ
- หลีกเลี่ยง
- แกน
- BE
- เพราะ
- จะกลายเป็น
- ร่างกาย
- ทั้งสอง
- รายละเอียด
- การก่อสร้าง
- แต่
- by
- ที่เรียกว่า
- CAN
- ศูนย์
- บาง
- การเปลี่ยนแปลง
- เปลี่ยนแปลง
- ซับซ้อน
- ความซับซ้อน
- คอมพิวเตอร์
- พลังของคอมพิวเตอร์
- งานที่เชื่อมต่อ
- ควบคุม
- การควบคุม
- การควบคุม
- การควบคุม
- แปลง
- ได้
- การสร้าง
- การสร้าง
- Dangerous
- วันที่
- องศา
- แผนก
- ทั้งนี้ขึ้นอยู่กับ
- บรรยาย
- ออกแบบ
- พัฒนา
- โดยตรง
- ทำ
- สอง
- ในระหว่าง
- พลวัต
- E&T
- แต่ละ
- โลก
- ที่มีประสิทธิภาพ
- ทั้ง
- ทำให้สามารถ
- พลังงาน
- วิศวกร
- เข้าสู่
- สภาพแวดล้อม
- แม้
- วิวัฒน์
- การสำรวจ
- อย่างยิ่ง
- ความยืดหยุ่น
- มีความยืดหยุ่น
- สำหรับ
- พบ
- ราคาเริ่มต้นที่
- ด้านหน้า
- ฟังก์ชัน
- อนาคต
- Go
- อย่างมาก
- มี
- จุดสูง
- อย่างไรก็ตาม
- HTTPS
- ภาพ
- การปรับปรุง
- in
- ประกอบด้วย
- ที่เพิ่มขึ้น
- แรงบันดาลใจ
- ความไม่แน่นอน
- แทน
- เข้าไป
- การประดิษฐ์คิดค้น
- นักวิจัย
- IT
- jpg
- ชนิด
- ใหญ่
- นำ
- ซ้าย
- ขา
- LIMIT
- วันหยุด
- Lot
- ทำ
- การทำ
- อาจ..
- เชิงกล
- กลไก
- กลไก
- กลาง
- การเคลื่อนย้าย
- การแก้ไข
- มากที่สุด
- การเคลื่อนไหว
- มอเตอร์
- การเคลื่อนไหว
- โดยธรรมชาติ
- นำทาง
- จำเป็นต้อง
- ใหม่
- ปกติ
- ตอนนี้
- จำนวน
- of
- มักจะ
- on
- ONE
- or
- อื่นๆ
- เกิน
- ของตนเอง
- แบบแผน
- รูปแบบ
- ดาวเคราะห์
- เพลโต
- เพลโตดาต้าอินเทลลิเจนซ์
- เพลโตดาต้า
- อำนาจ
- ให้
- การตีพิมพ์
- รวดเร็ว
- พิสัย
- ค่อนข้าง
- มาถึง
- เมื่อเร็ว ๆ นี้
- ลด
- ซ้ำแล้วซ้ำอีก
- ความต้องการ
- ต้อง
- ช่วยเหลือ
- นักวิจัย
- ขวา
- หุ่นยนต์
- หุ่นยนต์
- หุ่นยนต์
- แข็งแรง
- พูดว่า
- สถานการณ์
- วิทยาศาสตร์
- ค้นหา
- ส่วน
- กลุ่ม
- อย่างรุนแรง
- แสดงให้เห็นว่า
- สถานการณ์
- หก
- So
- อ่อน
- ค่อนข้าง
- โดยเฉพาะ
- มั่นคง
- ตรง
- ความเครียด
- ศึกษา
- อย่างเช่น
- ระบบ
- ระบบ
- ใช้เวลา
- การ
- เป้าหมาย
- ทีม
- ที่
- พื้นที่
- ของพวกเขา
- พวกเขา
- ล้อยางขัดเหล่านี้ติดตั้งบนแกน XNUMX (มม.) ผลิตภัณฑ์นี้ถูกผลิตในหลายรูปทรง และหลากหลายเบอร์ความแน่นหนาของปริมาณอนุภาคขัดของมัน จะทำให้ท่านได้รับประสิทธิภาพสูงในการขัดและการใช้งานที่ยาวนาน
- นี้
- ไปยัง
- ด้านบน
- ไปทาง
- การเปลี่ยน
- ลอง
- กลับ
- สอง
- มหาวิทยาลัย
- ใช้
- การใช้
- ความหลากหลาย
- ยานพาหนะ
- ผ่านทาง
- รายละเอียด
- ที่เดิน
- ดี
- คือ
- ที่
- WHO
- กว้าง
- ช่วงกว้าง
- กับ
- ไม่มี
- งาน
- การทำงาน
- จะ
- ลมทะเล
เพิ่มเติมจาก นาโนเวิร์ค


การผสานการทำงานของหุ่นยนต์แบบ Origami ที่รับรู้ ตัดสินใจ และตอบสนอง
โหนดต้นทาง: 2565107
ประทับเวลา: เมษายน 4, 2023
โครงสร้าง heterostructures แบบ perovskite แบบสอง/กึ่งสองมิติ: โครงสร้าง คุณสมบัติ และการใช้งาน
โหนดต้นทาง: 1938788
ประทับเวลา: กุมภาพันธ์ 3, 2023

นักวิจัยให้รายละเอียดเกี่ยวกับคุณสมบัติที่ไม่เคยเห็นมาก่อนในตระกูลของโลหะคาโกเมะที่มีตัวนำยิ่งยวด
โหนดต้นทาง: 1952937
ประทับเวลา: กุมภาพันธ์ 11, 2023

การปล่อยคาร์บอนจากปุ๋ยสามารถลดลงได้มากถึง 80% ภายในปี 2050
โหนดต้นทาง: 1951214
ประทับเวลา: กุมภาพันธ์ 11, 2023
เฟอร์โรอิเล็กทริกแบบใหม่สำหรับไมโครอิเล็กทรอนิกส์ที่มีประสิทธิภาพมากขึ้น
โหนดต้นทาง: 2716345
ประทับเวลา: มิถุนายน 9, 2023
ตัวเร่งปฏิกิริยาทองแดงนาโนที่ทำลายสถิติเปลี่ยน CO2 เป็นเชื้อเพลิงเหลวได้อย่างไร
โหนดต้นทาง: 1961058
ประทับเวลา: กุมภาพันธ์ 16, 2023
การพัฒนาเทคโนโลยีเพื่อลดต้นทุนการผลิตไฮโดรเจนสีเขียว
โหนดต้นทาง: 2700260
ประทับเวลา: มิถุนายน 2, 2023