โพสต์สั้นๆ นี้อธิบายถึงการปรับปรุงสถานีเลเซอร์ที่เราทำขึ้นเพื่อให้สามารถทำการทดลองจากระยะไกลได้
ปัญหาการตั้งค่า
แพลตฟอร์มการฉีดข้อบกพร่องด้วยเลเซอร์ของเราทำจากกล้องจุลทรรศน์ที่ใช้เพื่อโฟกัสแหล่งกำเนิดแสงเลเซอร์ไปยังอุปกรณ์ที่กำลังทดสอบ มีการติดตั้งกล้องอินฟราเรดเพื่อสังเกตสถาปัตยกรรมภายในของชิปเป้าหมาย และปรับรูปร่างลำแสงเลเซอร์ โชคดีที่มีการติดตั้งสเตจแบบใช้มอเตอร์ซึ่งช่วยให้ลำแสงเลเซอร์เคลื่อนผ่านชิปจากแอปพลิเคชันซอฟต์แวร์ที่เรากำหนดเองได้ เครื่องมือทั้งหมดที่เราพัฒนาทำงานบนระบบปฏิบัติการ Linux ดังนั้นจึงเป็นไปได้ที่จะใช้ผ่านการเชื่อมต่อ SSH หากคุณมีการเชื่อมต่ออินเทอร์เน็ตที่ดี เราประสบปัญหาความล่าช้าที่เกี่ยวข้องกับภาพสดของกล้องไมโครสโคป ซึ่งเราแก้ไขได้อย่างรวดเร็วด้วยการเปิดใช้ตัวเลือกการบีบอัด SSH (-C) ซึ่งไม่ได้เปิดใช้งานตามค่าเริ่มต้น และลดแบนด์วิดท์การสตรีมที่จำเป็นลงอย่างมาก อย่างไรก็ตาม ณ เวลานั้น องค์ประกอบบางอย่างยังจำเป็นต้องมีการแทรกแซงจากแหล่งกำเนิด:
- การควบคุมแหล่งกำเนิดแสงของกล้อง: อุปกรณ์เฉพาะให้แสงอินฟราเรดเพื่อให้แสงสว่างแก่ชิปสำหรับการสร้างภาพของกล้อง
- การเปิดหรือปิดชัตเตอร์กล้องกล: ชัตเตอร์นี้เป็นส่วนหนึ่งของกล้องจุลทรรศน์และต้องปิดเมื่อใช้เลเซอร์
- การเปลี่ยนวัตถุประสงค์ของกล้องจุลทรรศน์: วัตถุประสงค์ทางแสงที่แตกต่างกัน 4 แบบถูกติดตั้งบนป้อมหมุนเชิงกลและอนุญาตให้มีการขยายของกล้องจุลทรรศน์ที่แตกต่างกัน
ด้านล่างนี้เป็นรายละเอียดวิธีที่เราปรับแต่งแท่นทดสอบของเราเพื่อควบคุมชัตเตอร์และแหล่งกำเนิดแสงจากระยะไกล โดยเฉพาะอย่างยิ่ง เราต้องการจำกัดค่าใช้จ่ายในการดัดแปลงเหล่านั้น และทำให้พร้อมใช้งานโดยเร็วที่สุด
การควบคุมแหล่งกำเนิดแสง
พื้นผิวซิลิกอนของเซมิคอนดักเตอร์เป็นแบบกึ่งโปร่งใสจนถึงแสงอินฟราเรด และด้วยกล้องอินฟราเรด จึงสามารถสังเกตโครงสร้างภายในของวงจรได้ เพื่อให้สังเกตได้ วงจรจะต้องส่องสว่างด้วยแหล่งกำเนิดแสงอินฟราเรด กล้องจุลทรรศน์เลเซอร์ของเราจัดส่งมาพร้อมกับอุปกรณ์แหล่งกำเนิดแสงโดยเฉพาะ ก ฮายาชิ LA-150CEซึ่งมีสวิตช์เปิด/ปิดและปุ่มปรับความเข้มของแสง ดังที่แสดงด้านล่าง เมื่อเริ่มแคมเปญการทดสอบด้วยเลเซอร์ เรามักจะปิดแหล่งกำเนิดแสงเนื่องจากอาจรบกวนส่วนประกอบต่างๆ โดยเฉพาะอย่างยิ่งเมื่อตัวอย่างถูกทำให้บางลง

เมื่อมองไปที่ด้านหลังของอุปกรณ์ เราพบว่ามีสวิตช์ "รีโมท" และขั้วต่อภายนอกอยู่ เราเข้าใจว่าแหล่งกำเนิดแสงนี้มีความสามารถในการควบคุมระยะไกลผ่านขั้วต่อสหัสวรรษที่ผ่านมา เอกสารประกอบเล็กน้อยสามารถพบได้บนเว็บ แต่เราพบว่าในแค็ตตาล็อก Hayashi มีอยู่ หน่วยควบคุม LAN เข้ากันได้กับแหล่งกำเนิดแสงนี้ อย่างไรก็ตามผลิตภัณฑ์นี้ถูกยกเลิก นอกจากนี้การเชื่อมต่อ LAN ยังไม่ค่อยสะดวกนัก ในแคตตาล็อกเดียวกัน เราพบข้อมูลจำเพาะสำหรับขั้วต่อของแหล่งกำเนิดแสง แม้จะไม่ละเอียดมากนัก แต่ก็พอจะลองดูได้
pinout ควบคุมระยะไกลจากแคตตาล็อกผลิตภัณฑ์ Hayashi: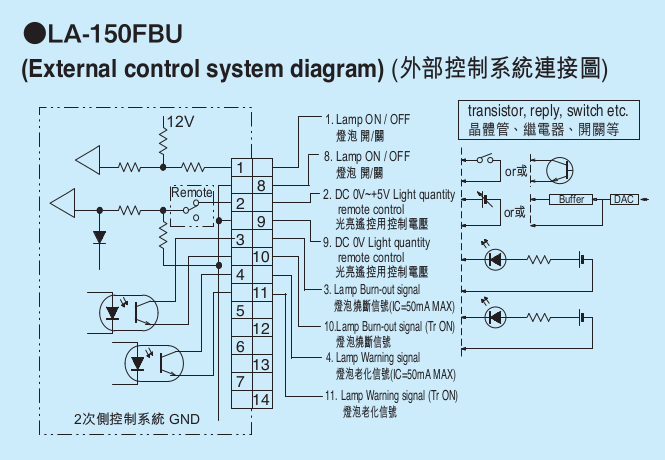
อินเทอร์เฟซนี้มีคุณสมบัติที่น่าสนใจหลักสองประการ:
- สามารถใช้พินดิจิทัล 1 และ 8 เพื่อเปิดและปิดหลอดไฟโดยลัดวงจรหรือไม่ก็ได้ พิน 8 เป็นกราวด์จริง ๆ ดังนั้นพิน 1 เท่านั้นที่เกี่ยวข้องจริงๆ
- ขาอนาล็อก 2 ควบคุมความเข้มของแสงด้วยสัญญาณตั้งแต่ 0 V (ความเข้มต่ำสุด) ถึง 5 V (ความเข้มสูงสุด) เมื่อเปิดใช้งานโหมดระยะไกล โพเทนชิออมิเตอร์ที่แผงด้านหน้าจะถูกข้ามและความเข้มของแสงจะถูกควบคุมโดยตรงโดยพินนี้
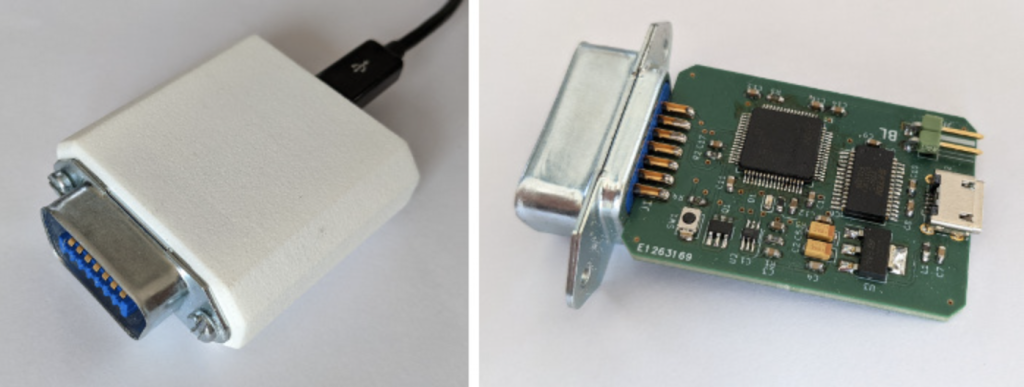
เราตัดสินใจที่จะสร้างจากศูนย์ด้วยตัวเราเอง ฮายาชิ ไลท์ รีโมตคอนโทรล โดยใช้ชิ้นส่วนต่อไปนี้:
- ไมโครคอนโทรลเลอร์ STM32 เพื่อโฮสต์โค้ดแอปพลิเคชันแบบฝังตัว
- ตัวแปลง USB เป็นอนุกรม FT232 เพื่อให้สามารถควบคุมดองเกิลจาก USB ได้
- AD5621B Digital-to-Analog Converter สำหรับการสร้างสัญญาณอนาล็อก 0 ถึง 5V เพื่อควบคุมความเข้มของแสง
เราออกแบบ PCB โดยใช้ KiCad. ตามจริงแล้ว การออกแบบนี้อาจใหญ่เกินไปเล็กน้อย: ไมโครคอนโทรลเลอร์มีขนาดใหญ่เกินไปสำหรับความต้องการในปัจจุบัน และ FT232 อาจถูกลบออกเนื่องจากอุปกรณ์ STM32 มีความสามารถด้าน USB อยู่แล้ว โดยต้องเสียเวลาไปกับการพัฒนาซอฟต์แวร์ เป้าหมายของเราคือการทำให้มันรวดเร็วและสกปรก และนำแผนผังที่เราออกแบบไว้บางส่วนกลับมาใช้ใหม่
เพื่อความสนุกสนาน และเนื่องจากเราเชื่อว่านี่เป็นภาษาที่มีแนวโน้มที่ดี เราจึงพัฒนาเฟิร์มแวร์ไมโครคอนโทรลเลอร์ใน Rust
ในที่สุดเราก็ออกแบบตู้พลาสติกอย่างง่ายโดยใช้ FreeCADและพิมพ์ด้วย ประติมากร.
โดยไม่คาดคิด ส่วนที่ยากที่สุดของโครงการนี้คือการระบุตัวเชื่อมต่อ (อ้างอิง 5710140 จาก Amphenol สำหรับฝ่ายชาย) และซื้อตัวเชื่อมต่อดังกล่าวเนื่องจากล้าสมัยและไม่มีจำหน่ายอีกต่อไปโดยซัพพลายเออร์หลายราย เครื่องมือค้นหาซัพพลายเออร์ชิ้นส่วน ออคโตพาร์ท สามารถช่วย
แผนผังและไฟล์การออกแบบทั้งหมดมีอยู่ในของเรา พื้นที่เก็บข้อมูล GitHub.
การควบคุมชัตเตอร์ของกล้อง
ในกล้องจุลทรรศน์ ลำแสงเลเซอร์และกล้องใช้เส้นทางแสงเดียวกัน เมื่อยิงเลเซอร์ แสงบางส่วนจะสะท้อนโดยซิลิกอนและจะตกกระทบกล้อง เพื่อป้องกันความเสียหายของเซ็นเซอร์ซึ่งอาจส่งผลให้เกิดเดดพิกเซลในระยะยาว คุณสามารถปิดชัตเตอร์เชิงกลแบบออปติคัลด้านหน้ากล้องได้ ชัตเตอร์เป็นแบบแมนนวลและแทบไม่ต้องออกแรงเลย
เพื่อให้การควบคุมระยะไกลเป็นไปได้ เราซื้อสเต็ปเปอร์มอเตอร์ขนาดเล็กและ a TIC T834 Stepper Motor Controller จาก Polulu. เราพัฒนาและพิมพ์เฟือง 3 มิติและตัวกล้องเพื่อติดตั้งบนกล้องจุลทรรศน์ เพื่อเคลื่อนชัตเตอร์ด้วยมอเตอร์
TIC T834 ต้องการแหล่งพลังงานเพื่อจ่ายพลังงานให้กับมอเตอร์ แต่เนื่องจากมอเตอร์ของเราใช้กระแสไฟไม่มากนัก เราจึงลัดวงจรแหล่งจ่ายไฟ USB ของ T834 เพื่อจ่ายพลังงานให้กับมอเตอร์เช่นกัน ตัวควบคุม TIC ติดตั้งและใช้งานได้ง่ายมาก มีการบันทึกไว้อย่างดี และเราใช้เวลาน้อยมากในการควบคุมมอเตอร์จากเครื่องมือซอฟต์แวร์ของเรา เราได้พัฒนาคลาสคอนโทรลเลอร์ขนาดเล็กใน Python ที่ตอนนี้รวมอยู่ในของเราแล้ว พิสเตจ ห้องสมุด.
ตัวควบคุมสเต็ปเปอร์มอเตอร์จำเป็นต้องค้นหาตำแหน่งมอเตอร์ปัจจุบันเมื่อเปิดเครื่อง ซึ่งทำได้โดยใช้ขั้นตอนการเริ่มต้นโดยที่มอเตอร์จะหมุนจนกระทั่งสวิตช์หน้าสัมผัสแจ้งตัวควบคุมว่ามอเตอร์อยู่ที่ตำแหน่งศูนย์ เราใช้สวิตช์ธรรมดาที่เชื่อมต่อโดยตรงกับ T834 ซึ่งมีคุณสมบัตินี้ในตัว
ส่วนของร่างกาย 3 มิติที่เราพิมพ์นั้นไม่แม่นยำมากนัก และเฟืองทั้งสองทำงานไม่ถูกต้องในครั้งแรก การใช้ความร้อนทำให้ชิ้นส่วนพลาสติกงอได้เล็กน้อยเพื่อแก้ไขช่องว่างระหว่างเฟือง หลังจากปรับแต่งเล็กน้อย เราก็สามารถเปิดและปิดชัตเตอร์กล้องจากระยะไกลได้อย่างสมบูรณ์แบบ!
การออกแบบเครื่องกลมีอยู่ในของเรา พื้นที่เก็บข้อมูล GitHub.
ความคิดสุดท้าย
การรวมการควบคุมแหล่งกำเนิดแสงและชัตเตอร์ของกล้องทำให้เราสามารถเรียกใช้แคมเปญการทดสอบเลเซอร์จำนวนมากได้จากระยะไกล นอกจากนี้ยังสะดวกกว่าเมื่อก่อน เนื่องจากตอนนี้การปิดชัตเตอร์และปิดไฟสามารถทำได้โดยอัตโนมัติเมื่อเปิดเลเซอร์ ในขณะที่ก่อนหน้านี้ต้องมีการแทรกแซงทางกายภาพของมนุษย์และอาจถูกลืมได้ง่าย
เกี่ยวกับการควบคุมป้อมปืนเป้าหมาย มีป้อมปืนที่ใช้เครื่องยนต์อยู่แล้ว แต่น่าเสียดายที่พวกมันมีราคาค่อนข้างแพง และมันอาจจะยุ่งยากในการเปลี่ยน ในขณะนี้ เราไม่พบวิธีแก้ปัญหาที่ง่ายและต้นทุนต่ำ การหมุนป้อมปืนด้วยมอเตอร์ภายนอกนั้นทำได้ยาก โดยเฉพาะอย่างยิ่งเนื่องจากมีสปริงที่ล็อคป้อมปืนให้อยู่กับที่เมื่อเป้าหมายอยู่ในแนวเดียวกับกล้องจุลทรรศน์ นอกจากนี้ น้ำหนักที่เราสามารถเพิ่มไปยังแท่นวางแบบใช้มอเตอร์ยังมีจำกัดอีกด้วย นี่ยังคงเป็นปัญหาที่เปิดอยู่ในขณะนี้ แต่ก็ไม่ได้ป้องกันการทำงานจากระยะไกล เราจำกัดเพียงกำลังขยายที่เลือกเท่านั้น
สุดท้าย การเปลี่ยนตัวอย่างเมื่อตัวอย่างเสียยังคงต้องเข้าถึงห้องปฏิบัติการ โชคดีที่มันไม่ได้เกิดขึ้นบ่อยเกินไป ในที่สุด เราอาจรวมวงจรหลายวงจรเข้าด้วยกันบนแผงวงจรลูกเดียว เพื่อให้เราสามารถเบิร์นอุปกรณ์บางชิ้นก่อนที่จะต้องเปลี่ยนใหม่ แต่เราไม่ได้พัฒนาวิธีแก้ปัญหาดังกล่าว

- เนื้อหาที่ขับเคลื่อนด้วย SEO และการเผยแพร่ประชาสัมพันธ์ รับการขยายวันนี้
- เพลโตไอสตรีม. ข้อมูลอัจฉริยะ Web3 ขยายความรู้ เข้าถึงได้ที่นี่.
- การสร้างอนาคตโดย Adryenn Ashley เข้าถึงได้ที่นี่.
- ซื้อและขายหุ้นในบริษัท PRE-IPO ด้วย PREIPO® เข้าถึงได้ที่นี่.
- ที่มา: https://www.ledger.com/blog/laser-improvements
- :มี
- :เป็น
- :ไม่
- :ที่ไหน
- 1
- 14
- 24
- 3d
- 8
- a
- สามารถ
- เข้า
- ถูกต้อง
- ข้าม
- จริง
- ดัดแปลง
- เพิ่ม
- การปรับเปลี่ยน
- หลังจาก
- ชิด
- ทั้งหมด
- อนุญาต
- ช่วยให้
- แล้ว
- ด้วย
- an
- และ
- ใด
- อีกต่อไป
- การใช้งาน
- สถาปัตยกรรม
- เป็น
- AS
- At
- อัตโนมัติ
- ใช้ได้
- แบนด์วิดธ์
- BE
- คาน
- เพราะ
- ก่อน
- เชื่อ
- ด้านล่าง
- ระหว่าง
- ใหญ่
- บิต
- ร่างกาย
- ซื้อ
- แตก
- สร้าง
- built-in
- เผา
- แต่
- by
- ห้อง
- รณรงค์
- แคมเปญ
- CAN
- ความสามารถในการ
- แค็ตตาล็อก
- ชิป
- ชั้น
- ปิดหน้านี้
- ปิด
- ปิด
- รหัส
- เข้ากันได้
- ส่วนประกอบ
- งานที่เชื่อมต่อ
- การเชื่อมต่อ
- การเชื่อมต่อ
- ติดต่อเรา
- ควบคุม
- การควบคุม
- ตัวควบคุม
- การควบคุม
- การควบคุม
- สะดวกสบาย
- แก้ไข
- ราคา
- ได้
- ปัจจุบัน
- ประเพณี
- การปรับแต่ง
- ตาย
- การซื้อขาย
- ตัดสินใจ
- ทุ่มเท
- ค่าเริ่มต้น
- ออกแบบ
- ได้รับการออกแบบ
- รายละเอียด
- พัฒนา
- พัฒนา
- พัฒนาการ
- เครื่อง
- อุปกรณ์
- DID
- ต่าง
- ยาก
- โดยตรง
- เอกสาร
- ทำ
- ทำ
- ลง
- วาด
- ในระหว่าง
- อย่างง่ายดาย
- ง่าย
- องค์ประกอบ
- ที่ฝัง
- เปิดการใช้งาน
- พลังงาน
- ปรับปรุง
- พอ
- อุปกรณ์
- พร้อม
- โดยเฉพาะอย่างยิ่ง
- ในที่สุด
- มีอยู่
- ที่มีอยู่
- แพง
- การทดลอง
- ภายนอก
- ต้องเผชิญกับ
- ความผิดพลาด
- ลักษณะ
- คุณสมบัติ
- สองสาม
- ไฟล์
- ในที่สุด
- หา
- ชื่อจริง
- ครั้งแรก
- โฟกัส
- ดังต่อไปนี้
- สำหรับ
- บังคับ
- ลืม
- โชคดี
- พบ
- เศษ
- ราคาเริ่มต้นที่
- ด้านหน้า
- สนุก
- ช่องว่าง
- รุ่น
- เป้าหมาย
- ดี
- อย่างมาก
- พื้น
- เกิดขึ้น
- ยาก
- มี
- ช่วย
- ตี
- เจ้าภาพ
- สรุป ความน่าเชื่อถือของ Olymp Trade?
- อย่างไรก็ตาม
- HTTPS
- เป็นมนุษย์
- ระบุ
- ระบุ
- ภาพ
- in
- แบบบูรณาการ
- น่าสนใจ
- อินเตอร์เฟซ
- แทรกแซง
- ภายใน
- อินเทอร์เน็ต
- การเชื่อมต่ออินเทอร์เน็ต
- การแทรกแซง
- ปัญหา
- ปัญหา
- IT
- เพียงแค่
- ห้องปฏิบัติการ
- ภาษา
- เลเซอร์
- ความแอบแฝง
- ปัญหาเวลาแฝง
- บัญชีแยกประเภท
- ห้องสมุด
- เบา
- LIMIT
- ถูก จำกัด
- ลินุกซ์
- น้อย
- สด
- ล็อค
- นาน
- Lot
- ที่มีราคาต่ำ
- ทำ
- หลัก
- ทำ
- การทำ
- คู่มือ
- หลาย
- ความกว้างสูงสุด
- สูงสุด
- อาจ..
- เชิงกล
- กล้องจุลทรรศน์
- สหัสวรรษ
- ขั้นต่ำ
- โหมด
- ขณะ
- ข้อมูลเพิ่มเติม
- มากที่สุด
- เครื่องยนต์
- ย้าย
- การย้าย
- ต้อง
- จำเป็นต้อง
- ต้อง
- ไม่
- ตอนนี้
- วัตถุประสงค์
- วัตถุประสงค์
- สังเกต
- ล้าสมัย
- of
- ปิด
- เสนอ
- มักจะ
- on
- เพียง
- เปิด
- การดำเนินงาน
- ระบบปฏิบัติการ
- ตัวเลือกเสริม (Option)
- or
- ใบสั่ง
- ของเรา
- ออก
- การระบาดกระจายทั่ว
- แผง
- ส่วนหนึ่ง
- ในสิ่งที่สนใจ
- ส่วน
- อดีต
- เส้นทาง
- กายภาพ
- ต้นสน
- สถานที่
- พลาสติก
- เวที
- เพลโต
- เพลโตดาต้าอินเทลลิเจนซ์
- เพลโตดาต้า
- ตำแหน่ง
- เป็นไปได้
- โพสต์
- อำนาจ
- พาวเวอร์ซัพพลาย
- ขับเคลื่อน
- ป้องกัน
- ผลิตภัณฑ์
- ผลิตภัณฑ์
- โครงการ
- แวว
- ให้
- ให้
- ให้
- ซื้อ
- หลาม
- รวดเร็ว
- อย่างรวดเร็ว
- ตั้งแต่
- จริงๆ
- ลด
- สะท้อนให้เห็นถึง
- ตรงประเด็น
- รีโมท
- ลบออก
- แทนที่
- การแทนที่
- จำเป็นต้องใช้
- ต้อง
- ผล
- นำมาใช้ใหม่
- วิ่ง
- สนิม
- เดียวกัน
- ค้นหา
- เลือก
- อุปกรณ์กึ่งตัวนำ
- การติดตั้ง
- รูปร่าง
- Share
- จัดส่ง
- การยิง
- สั้น
- ลัด
- shorting
- ด้าน
- สัญญาณ
- ซิลิคอน
- ง่าย
- ตั้งแต่
- เดียว
- เล็ก
- So
- ซอฟต์แวร์
- การพัฒนาซอฟต์แวร์
- ขาย
- ทางออก
- บาง
- ในไม่ช้า
- แหล่ง
- สเปค
- สปิน
- ฤดูใบไม้ผลิ
- ระยะ
- ข้อความที่เริ่ม
- สถานี
- ยังคง
- STM32
- ที่พริ้ว
- โครงสร้าง
- อย่างเช่น
- ซัพพลายเออร์
- จัดหาอุปกรณ์
- สวิตซ์
- ระบบ
- เป้าหมาย
- บอก
- ทดสอบ
- การทดสอบ
- กว่า
- ที่
- พื้นที่
- พวกเขา
- ที่นั่น
- ดังนั้น
- พวกเขา
- นี้
- เหล่านั้น
- แต่?
- ตลอด
- เวลา
- ไปยัง
- เกินไป
- เอา
- เครื่องมือ
- ลอง
- หัน
- การหมุน
- สอง
- ภายใต้
- เข้าใจ
- น่าเสียดาย
- จนกระทั่ง
- us
- USB
- ใช้
- มือสอง
- การใช้
- มักจะ
- มาก
- การสร้างภาพ
- อยาก
- คือ
- we
- เว็บ
- น้ำหนัก
- ดี
- คือ
- เมื่อ
- ที่
- จะ
- กับ
- การทำงาน
- ทำงานจากระยะไกล
- ยัง
- เธอ
- ลมทะเล
- เป็นศูนย์