03 พฤษภาคม 2023 (ข่าวนาโนเวิร์ค) นับตั้งแต่คำว่า "หุ่นยนต์แบบอ่อน" ถูกนำมาใช้ในปี 2008 วิศวกรในสาขานี้ได้สร้างตัวแทนที่หลากหลายของเครื่องจักรที่มีความยืดหยุ่น ซึ่งมีประโยชน์ในการสำรวจ การเคลื่อนที่ การฟื้นฟู และแม้กระทั่งในอวกาศ แหล่งที่มาของแรงบันดาลใจประการหนึ่ง: วิธีที่สัตว์ต่างๆ เคลื่อนไหวในป่า
ทีมนักวิจัยของ MIT ได้ก้าวไปอีกขั้นด้วยการพัฒนา ซอฟท์ซูซึ่งเป็นแพลตฟอร์มที่ได้รับแรงบันดาลใจทางชีวภาพที่ช่วยให้วิศวกรสามารถศึกษาการออกแบบร่วมของหุ่นยนต์แบบอ่อนได้ กรอบการทำงานจะปรับอัลกอริธึมที่ประกอบด้วยการออกแบบให้เหมาะสม ซึ่งจะกำหนดว่าหุ่นยนต์จะมีหน้าตาเป็นอย่างไร และการควบคุมหรือระบบที่ช่วยให้หุ่นยนต์เคลื่อนไหวได้ ปรับปรุงวิธีที่ผู้ใช้สร้างโครงร่างสำหรับเครื่องจักรที่มีศักยภาพโดยอัตโนมัติ
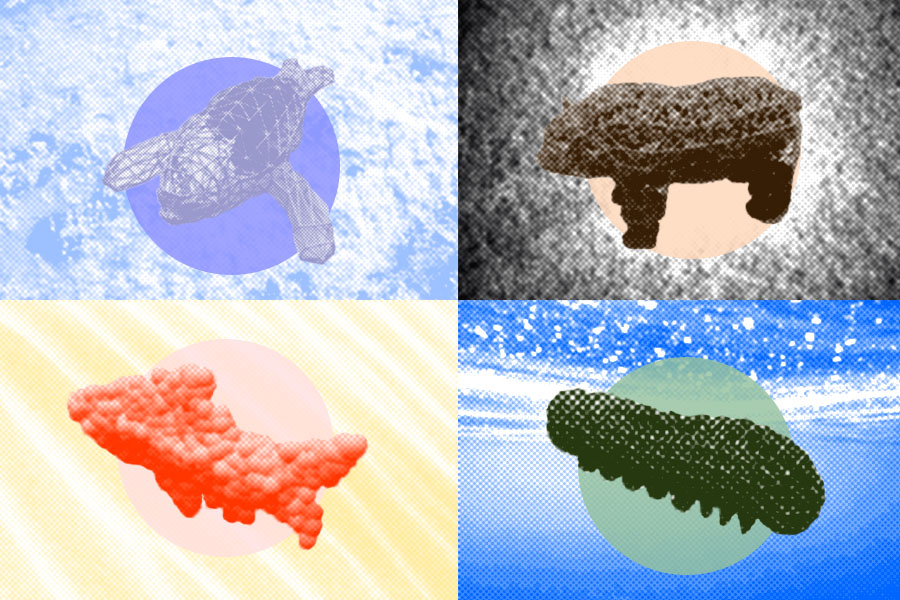 นักวิจัยได้พัฒนาระบบสำหรับการออกแบบหุ่นยนต์แบบอ่อนร่วมกัน ซึ่งหมายถึงการค้นหาร่วมกันและปรับแต่งการออกแบบหุ่นยนต์ให้เหมาะสม เช่น รูปร่างของหุ่นยนต์ ตำแหน่งที่จะวางกล้ามเนื้อในร่างกายหุ่นยนต์ ความนุ่มนวลของหุ่นยนต์ในส่วนต่างๆ ของร่างกาย และจากการออกแบบหุ่นยนต์ วิธีการควบคุมเพื่อให้บรรลุภารกิจตามเป้าหมาย (ภาพ: Alex Shipps/MIT CSAIL และนักวิจัย)
แพลตฟอร์มการเดินบนผืนป่าประกอบด้วยโมเดล 3 มิติของสัตว์ต่างๆ เช่น หมีแพนด้า ปลา ฉลาม และหนอนผีเสื้อ ซึ่งเป็นการออกแบบที่สามารถจำลองงานหุ่นยนต์ที่อ่อนนุ่ม เช่น การเคลื่อนที่ การเลี้ยวที่ว่องไว และการติดตามเส้นทางในสภาพแวดล้อมที่แตกต่างกัน ไม่ว่าจะด้วยหิมะ ทะเลทราย ดินเหนียว หรือน้ำ แพลตฟอร์มนี้แสดงให้เห็นถึงประสิทธิภาพของการออกแบบที่หลากหลายในภูมิประเทศที่แตกต่างกัน
“เฟรมเวิร์กของเราช่วยให้ผู้ใช้ค้นหาการกำหนดค่าที่ดีที่สุดสำหรับรูปร่างของหุ่นยนต์ได้ ช่วยให้พวกเขาสามารถออกแบบอัลกอริธึมหุ่นยนต์แบบอ่อนที่สามารถทำสิ่งต่างๆ ได้มากมาย” นักศึกษาปริญญาเอกจาก MIT Tsun-Hsuan Wang ซึ่งเป็นบริษัทในเครือของห้องปฏิบัติการวิทยาการคอมพิวเตอร์และปัญญาประดิษฐ์ ( CSAIL) ซึ่งเป็นหัวหน้านักวิจัยในโครงการนี้ “โดยพื้นฐานแล้ว มันช่วยให้เราเข้าใจกลยุทธ์ที่ดีที่สุดสำหรับหุ่นยนต์ในการโต้ตอบกับสภาพแวดล้อมของพวกเขา”
SoftZoo มีความครอบคลุมมากกว่าแพลตฟอร์มที่คล้ายกัน ซึ่งจำลองการออกแบบและการควบคุมอยู่แล้ว เนื่องจากเป็นการจำลองการเคลื่อนไหวที่ตอบสนองต่อลักษณะทางกายภาพของชีวนิเวศต่างๆ ความเก่งกาจของเฟรมเวิร์กมาจากเอ็นจิ้นมัลติฟิสิกส์ที่แตกต่างกัน ซึ่งช่วยให้สามารถจำลองหลายแง่มุมของระบบทางกายภาพได้ในเวลาเดียวกัน เช่น เบบี้ซีลที่กลายเป็นน้ำแข็ง หรือหนอนผีเสื้อที่กำลังเคลื่อนตัวข้ามสภาพแวดล้อมพื้นที่ชุ่มน้ำ ความแตกต่างของเครื่องยนต์ช่วยเพิ่มประสิทธิภาพการออกแบบร่วมโดยการลดจำนวนการจำลองที่มักมีราคาแพงซึ่งจำเป็นในการแก้ปัญหาการควบคุมและการออกแบบด้วยคอมพิวเตอร์ เป็นผลให้ผู้ใช้สามารถออกแบบและเคลื่อนย้ายซอฟต์โรบ็อตด้วยอัลกอริธึมเฉพาะที่ซับซ้อนยิ่งขึ้น
ความสามารถของระบบในการจำลองปฏิสัมพันธ์กับภูมิประเทศที่แตกต่างกัน แสดงให้เห็นถึงความสำคัญของสัณฐานวิทยา ซึ่งเป็นสาขาวิชาชีววิทยาที่ศึกษารูปร่าง ขนาด และรูปแบบของสิ่งมีชีวิตต่างๆ โครงสร้างทางชีววิทยาบางอย่างมีความเหมาะสมมากกว่าโครงสร้างอื่นๆ ขึ้นอยู่กับสภาพแวดล้อม เหมือนกับการเปรียบเทียบพิมพ์เขียวสำหรับเครื่องจักรที่ทำงานคล้ายกัน
เค้าโครงทางชีววิทยาเหล่านี้สามารถสร้างแรงบันดาลใจให้กับชีวิตประดิษฐ์เฉพาะทางที่จำเพาะเจาะจงมากขึ้น “รูปทรงเรขาคณิตที่เป็นลูกคลื่นอย่างนุ่มนวลของแมงกะพรุนช่วยให้มันเดินทางข้ามแหล่งน้ำขนาดใหญ่ได้อย่างมีประสิทธิภาพ เป็นแรงบันดาลใจให้นักวิจัยพัฒนาหุ่นยนต์แบบอ่อนสายพันธุ์ใหม่ และเปิดโอกาสที่เป็นไปได้อย่างไม่จำกัดในสิ่งที่สิ่งมีชีวิตเทียมที่เพาะเลี้ยงในซิลิโกสามารถทำได้” Wang กล่าว นอกจากนี้ แมลงปอยังสามารถเคลื่อนที่ได้อย่างว่องไวซึ่งสิ่งมีชีวิตบินอื่นๆ ไม่สามารถทำได้ เนื่องจากพวกมันมีโครงสร้างพิเศษบนปีก ซึ่งจะเปลี่ยนจุดศูนย์กลางมวลเมื่อบิน แพลตฟอร์มของเราเพิ่มประสิทธิภาพการเคลื่อนที่ในลักษณะเดียวกับที่แมลงปอสามารถทำงานผ่านสภาพแวดล้อมได้อย่างเป็นธรรมชาติมากขึ้น”
ก่อนหน้านี้หุ่นยนต์ต้องดิ้นรนเพื่อนำทางผ่านสภาพแวดล้อมที่รกเพราะร่างกายของพวกมันไม่สอดคล้องกับสภาพแวดล้อม อย่างไรก็ตาม ด้วย SoftZoo นักออกแบบสามารถพัฒนาสมองและร่างกายของหุ่นยนต์ไปพร้อมๆ กัน โดยร่วมเพิ่มประสิทธิภาพเครื่องจักรทั้งบนบกและในน้ำเพื่อให้มีการรับรู้และเชี่ยวชาญมากขึ้น ด้วยความฉลาดด้านพฤติกรรมและสัณฐานวิทยาที่เพิ่มขึ้น หุ่นยนต์จะมีประโยชน์มากขึ้นในการทำภารกิจช่วยเหลือและดำเนินการสำรวจให้สำเร็จ ตัวอย่างเช่น หากมีบุคคลสูญหายในระหว่างน้ำท่วม หุ่นยนต์อาจสามารถเดินทางข้ามน้ำได้อย่างมีประสิทธิภาพมากขึ้น เนื่องจากได้รับการปรับให้เหมาะสมโดยใช้วิธีการที่สาธิตในแพลตฟอร์ม SotftZoo
“SoftZoo นำเสนอการจำลองแบบโอเพ่นซอร์สสำหรับนักออกแบบหุ่นยนต์แบบอ่อน ช่วยให้พวกเขาสร้างหุ่นยนต์ในโลกแห่งความเป็นจริงได้ง่ายและยืดหยุ่นมากขึ้น ในขณะเดียวกันก็เร่งความสามารถในการเคลื่อนที่ของเครื่องจักรในสภาพแวดล้อมที่หลากหลาย” ผู้ร่วมเขียนการศึกษา Chuang Gan นักวิทยาศาสตร์การวิจัยของ MIT กล่าวเสริม -IBM Watson AI Lab ซึ่งเร็วๆ นี้จะเป็นผู้ช่วยศาสตราจารย์ที่ University of Massachusetts at Amherst
“แนวทางการคำนวณนี้เพื่อร่วมออกแบบตัวหุ่นยนต์แบบอ่อนและสมองของพวกมัน (ซึ่งก็คือตัวควบคุม) เปิดประตูสู่การสร้างเครื่องจักรที่ปรับแต่งตามความต้องการได้อย่างรวดเร็วซึ่งออกแบบมาเพื่องานเฉพาะ” Daniela Rus ผู้อำนวยการของ CSAIL และ Andrew และ ศาสตราจารย์ Erna Viterbi ในภาควิชาวิศวกรรมไฟฟ้าและวิทยาการคอมพิวเตอร์ (EECS) ของ MIT ซึ่งเป็นผู้เขียนผลงานอีกคน
ก่อนที่จะสร้างหุ่นยนต์ประเภทใดก็ตาม เฟรมเวิร์กอาจใช้แทนการทดสอบฉากที่ไม่เป็นธรรมชาติในภาคสนามได้ ตัวอย่างเช่น การประเมินว่าหุ่นยนต์ที่มีลักษณะคล้ายหมีมีพฤติกรรมอย่างไรในทะเลทรายอาจเป็นเรื่องยากสำหรับทีมวิจัยที่ทำงานในที่ราบในเมืองบอสตัน วิศวกรหุ่นยนต์แบบอ่อนสามารถใช้โมเดล 3 มิติใน SoftZoo เพื่อจำลองการออกแบบที่แตกต่างกัน และประเมินประสิทธิภาพของอัลกอริทึมในการควบคุมหุ่นยนต์ในการนำทาง ในทางกลับกัน วิธีนี้จะช่วยประหยัดเวลาและทรัพยากรของนักวิจัย
อย่างไรก็ตาม ข้อจำกัดของเทคนิคการผลิตในปัจจุบันยังคงเป็นอุปสรรคในการทำให้การออกแบบหุ่นยนต์แบบอ่อนเหล่านี้มีชีวิตขึ้นมา “การถ่ายโอนจากการจำลองไปยังหุ่นยนต์ทางกายภาพยังคงไม่ได้รับการแก้ไขและต้องมีการศึกษาเพิ่มเติม” Wang กล่าว “แบบจำลองของกล้ามเนื้อ ความแข็งที่แตกต่างกันเชิงพื้นที่ และการรับรู้ใน SoftZoo ไม่สามารถรับรู้ได้อย่างตรงไปตรงมาด้วยเทคนิคการผลิตในปัจจุบัน ดังนั้นเราจึงดำเนินการกับความท้าทายเหล่านี้”
ในอนาคต นักออกแบบของแพลตฟอร์มกำลังมองหาการใช้งานในกลไกของมนุษย์ เช่น การจัดการ เนื่องจากความสามารถในการทดสอบการควบคุมของหุ่นยนต์ เพื่อแสดงให้เห็นถึงศักยภาพนี้ ทีมงานของ Wang ได้ออกแบบแขนสามมิติเพื่อขว้างก้อนหิมะไปข้างหน้า
นักวิจัยได้พัฒนาระบบสำหรับการออกแบบหุ่นยนต์แบบอ่อนร่วมกัน ซึ่งหมายถึงการค้นหาร่วมกันและปรับแต่งการออกแบบหุ่นยนต์ให้เหมาะสม เช่น รูปร่างของหุ่นยนต์ ตำแหน่งที่จะวางกล้ามเนื้อในร่างกายหุ่นยนต์ ความนุ่มนวลของหุ่นยนต์ในส่วนต่างๆ ของร่างกาย และจากการออกแบบหุ่นยนต์ วิธีการควบคุมเพื่อให้บรรลุภารกิจตามเป้าหมาย (ภาพ: Alex Shipps/MIT CSAIL และนักวิจัย)
แพลตฟอร์มการเดินบนผืนป่าประกอบด้วยโมเดล 3 มิติของสัตว์ต่างๆ เช่น หมีแพนด้า ปลา ฉลาม และหนอนผีเสื้อ ซึ่งเป็นการออกแบบที่สามารถจำลองงานหุ่นยนต์ที่อ่อนนุ่ม เช่น การเคลื่อนที่ การเลี้ยวที่ว่องไว และการติดตามเส้นทางในสภาพแวดล้อมที่แตกต่างกัน ไม่ว่าจะด้วยหิมะ ทะเลทราย ดินเหนียว หรือน้ำ แพลตฟอร์มนี้แสดงให้เห็นถึงประสิทธิภาพของการออกแบบที่หลากหลายในภูมิประเทศที่แตกต่างกัน
“เฟรมเวิร์กของเราช่วยให้ผู้ใช้ค้นหาการกำหนดค่าที่ดีที่สุดสำหรับรูปร่างของหุ่นยนต์ได้ ช่วยให้พวกเขาสามารถออกแบบอัลกอริธึมหุ่นยนต์แบบอ่อนที่สามารถทำสิ่งต่างๆ ได้มากมาย” นักศึกษาปริญญาเอกจาก MIT Tsun-Hsuan Wang ซึ่งเป็นบริษัทในเครือของห้องปฏิบัติการวิทยาการคอมพิวเตอร์และปัญญาประดิษฐ์ ( CSAIL) ซึ่งเป็นหัวหน้านักวิจัยในโครงการนี้ “โดยพื้นฐานแล้ว มันช่วยให้เราเข้าใจกลยุทธ์ที่ดีที่สุดสำหรับหุ่นยนต์ในการโต้ตอบกับสภาพแวดล้อมของพวกเขา”
SoftZoo มีความครอบคลุมมากกว่าแพลตฟอร์มที่คล้ายกัน ซึ่งจำลองการออกแบบและการควบคุมอยู่แล้ว เนื่องจากเป็นการจำลองการเคลื่อนไหวที่ตอบสนองต่อลักษณะทางกายภาพของชีวนิเวศต่างๆ ความเก่งกาจของเฟรมเวิร์กมาจากเอ็นจิ้นมัลติฟิสิกส์ที่แตกต่างกัน ซึ่งช่วยให้สามารถจำลองหลายแง่มุมของระบบทางกายภาพได้ในเวลาเดียวกัน เช่น เบบี้ซีลที่กลายเป็นน้ำแข็ง หรือหนอนผีเสื้อที่กำลังเคลื่อนตัวข้ามสภาพแวดล้อมพื้นที่ชุ่มน้ำ ความแตกต่างของเครื่องยนต์ช่วยเพิ่มประสิทธิภาพการออกแบบร่วมโดยการลดจำนวนการจำลองที่มักมีราคาแพงซึ่งจำเป็นในการแก้ปัญหาการควบคุมและการออกแบบด้วยคอมพิวเตอร์ เป็นผลให้ผู้ใช้สามารถออกแบบและเคลื่อนย้ายซอฟต์โรบ็อตด้วยอัลกอริธึมเฉพาะที่ซับซ้อนยิ่งขึ้น
ความสามารถของระบบในการจำลองปฏิสัมพันธ์กับภูมิประเทศที่แตกต่างกัน แสดงให้เห็นถึงความสำคัญของสัณฐานวิทยา ซึ่งเป็นสาขาวิชาชีววิทยาที่ศึกษารูปร่าง ขนาด และรูปแบบของสิ่งมีชีวิตต่างๆ โครงสร้างทางชีววิทยาบางอย่างมีความเหมาะสมมากกว่าโครงสร้างอื่นๆ ขึ้นอยู่กับสภาพแวดล้อม เหมือนกับการเปรียบเทียบพิมพ์เขียวสำหรับเครื่องจักรที่ทำงานคล้ายกัน
เค้าโครงทางชีววิทยาเหล่านี้สามารถสร้างแรงบันดาลใจให้กับชีวิตประดิษฐ์เฉพาะทางที่จำเพาะเจาะจงมากขึ้น “รูปทรงเรขาคณิตที่เป็นลูกคลื่นอย่างนุ่มนวลของแมงกะพรุนช่วยให้มันเดินทางข้ามแหล่งน้ำขนาดใหญ่ได้อย่างมีประสิทธิภาพ เป็นแรงบันดาลใจให้นักวิจัยพัฒนาหุ่นยนต์แบบอ่อนสายพันธุ์ใหม่ และเปิดโอกาสที่เป็นไปได้อย่างไม่จำกัดในสิ่งที่สิ่งมีชีวิตเทียมที่เพาะเลี้ยงในซิลิโกสามารถทำได้” Wang กล่าว นอกจากนี้ แมลงปอยังสามารถเคลื่อนที่ได้อย่างว่องไวซึ่งสิ่งมีชีวิตบินอื่นๆ ไม่สามารถทำได้ เนื่องจากพวกมันมีโครงสร้างพิเศษบนปีก ซึ่งจะเปลี่ยนจุดศูนย์กลางมวลเมื่อบิน แพลตฟอร์มของเราเพิ่มประสิทธิภาพการเคลื่อนที่ในลักษณะเดียวกับที่แมลงปอสามารถทำงานผ่านสภาพแวดล้อมได้อย่างเป็นธรรมชาติมากขึ้น”
ก่อนหน้านี้หุ่นยนต์ต้องดิ้นรนเพื่อนำทางผ่านสภาพแวดล้อมที่รกเพราะร่างกายของพวกมันไม่สอดคล้องกับสภาพแวดล้อม อย่างไรก็ตาม ด้วย SoftZoo นักออกแบบสามารถพัฒนาสมองและร่างกายของหุ่นยนต์ไปพร้อมๆ กัน โดยร่วมเพิ่มประสิทธิภาพเครื่องจักรทั้งบนบกและในน้ำเพื่อให้มีการรับรู้และเชี่ยวชาญมากขึ้น ด้วยความฉลาดด้านพฤติกรรมและสัณฐานวิทยาที่เพิ่มขึ้น หุ่นยนต์จะมีประโยชน์มากขึ้นในการทำภารกิจช่วยเหลือและดำเนินการสำรวจให้สำเร็จ ตัวอย่างเช่น หากมีบุคคลสูญหายในระหว่างน้ำท่วม หุ่นยนต์อาจสามารถเดินทางข้ามน้ำได้อย่างมีประสิทธิภาพมากขึ้น เนื่องจากได้รับการปรับให้เหมาะสมโดยใช้วิธีการที่สาธิตในแพลตฟอร์ม SotftZoo
“SoftZoo นำเสนอการจำลองแบบโอเพ่นซอร์สสำหรับนักออกแบบหุ่นยนต์แบบอ่อน ช่วยให้พวกเขาสร้างหุ่นยนต์ในโลกแห่งความเป็นจริงได้ง่ายและยืดหยุ่นมากขึ้น ในขณะเดียวกันก็เร่งความสามารถในการเคลื่อนที่ของเครื่องจักรในสภาพแวดล้อมที่หลากหลาย” ผู้ร่วมเขียนการศึกษา Chuang Gan นักวิทยาศาสตร์การวิจัยของ MIT กล่าวเสริม -IBM Watson AI Lab ซึ่งเร็วๆ นี้จะเป็นผู้ช่วยศาสตราจารย์ที่ University of Massachusetts at Amherst
“แนวทางการคำนวณนี้เพื่อร่วมออกแบบตัวหุ่นยนต์แบบอ่อนและสมองของพวกมัน (ซึ่งก็คือตัวควบคุม) เปิดประตูสู่การสร้างเครื่องจักรที่ปรับแต่งตามความต้องการได้อย่างรวดเร็วซึ่งออกแบบมาเพื่องานเฉพาะ” Daniela Rus ผู้อำนวยการของ CSAIL และ Andrew และ ศาสตราจารย์ Erna Viterbi ในภาควิชาวิศวกรรมไฟฟ้าและวิทยาการคอมพิวเตอร์ (EECS) ของ MIT ซึ่งเป็นผู้เขียนผลงานอีกคน
ก่อนที่จะสร้างหุ่นยนต์ประเภทใดก็ตาม เฟรมเวิร์กอาจใช้แทนการทดสอบฉากที่ไม่เป็นธรรมชาติในภาคสนามได้ ตัวอย่างเช่น การประเมินว่าหุ่นยนต์ที่มีลักษณะคล้ายหมีมีพฤติกรรมอย่างไรในทะเลทรายอาจเป็นเรื่องยากสำหรับทีมวิจัยที่ทำงานในที่ราบในเมืองบอสตัน วิศวกรหุ่นยนต์แบบอ่อนสามารถใช้โมเดล 3 มิติใน SoftZoo เพื่อจำลองการออกแบบที่แตกต่างกัน และประเมินประสิทธิภาพของอัลกอริทึมในการควบคุมหุ่นยนต์ในการนำทาง ในทางกลับกัน วิธีนี้จะช่วยประหยัดเวลาและทรัพยากรของนักวิจัย
อย่างไรก็ตาม ข้อจำกัดของเทคนิคการผลิตในปัจจุบันยังคงเป็นอุปสรรคในการทำให้การออกแบบหุ่นยนต์แบบอ่อนเหล่านี้มีชีวิตขึ้นมา “การถ่ายโอนจากการจำลองไปยังหุ่นยนต์ทางกายภาพยังคงไม่ได้รับการแก้ไขและต้องมีการศึกษาเพิ่มเติม” Wang กล่าว “แบบจำลองของกล้ามเนื้อ ความแข็งที่แตกต่างกันเชิงพื้นที่ และการรับรู้ใน SoftZoo ไม่สามารถรับรู้ได้อย่างตรงไปตรงมาด้วยเทคนิคการผลิตในปัจจุบัน ดังนั้นเราจึงดำเนินการกับความท้าทายเหล่านี้”
ในอนาคต นักออกแบบของแพลตฟอร์มกำลังมองหาการใช้งานในกลไกของมนุษย์ เช่น การจัดการ เนื่องจากความสามารถในการทดสอบการควบคุมของหุ่นยนต์ เพื่อแสดงให้เห็นถึงศักยภาพนี้ ทีมงานของ Wang ได้ออกแบบแขนสามมิติเพื่อขว้างก้อนหิมะไปข้างหน้า
นักวิจัยได้พัฒนาระบบสำหรับการออกแบบหุ่นยนต์แบบอ่อนร่วมกัน ซึ่งหมายถึงการค้นหาร่วมกันและปรับแต่งการออกแบบหุ่นยนต์ให้เหมาะสม เช่น รูปร่างของหุ่นยนต์ ตำแหน่งที่จะวางกล้ามเนื้อในร่างกายหุ่นยนต์ ความนุ่มนวลของหุ่นยนต์ในส่วนต่างๆ ของร่างกาย และจากการออกแบบหุ่นยนต์ วิธีการควบคุมเพื่อให้บรรลุภารกิจตามเป้าหมาย (ภาพ: Alex Shipps/MIT CSAIL และนักวิจัย)
แพลตฟอร์มการเดินบนผืนป่าประกอบด้วยโมเดล 3 มิติของสัตว์ต่างๆ เช่น หมีแพนด้า ปลา ฉลาม และหนอนผีเสื้อ ซึ่งเป็นการออกแบบที่สามารถจำลองงานหุ่นยนต์ที่อ่อนนุ่ม เช่น การเคลื่อนที่ การเลี้ยวที่ว่องไว และการติดตามเส้นทางในสภาพแวดล้อมที่แตกต่างกัน ไม่ว่าจะด้วยหิมะ ทะเลทราย ดินเหนียว หรือน้ำ แพลตฟอร์มนี้แสดงให้เห็นถึงประสิทธิภาพของการออกแบบที่หลากหลายในภูมิประเทศที่แตกต่างกัน
“เฟรมเวิร์กของเราช่วยให้ผู้ใช้ค้นหาการกำหนดค่าที่ดีที่สุดสำหรับรูปร่างของหุ่นยนต์ได้ ช่วยให้พวกเขาสามารถออกแบบอัลกอริธึมหุ่นยนต์แบบอ่อนที่สามารถทำสิ่งต่างๆ ได้มากมาย” นักศึกษาปริญญาเอกจาก MIT Tsun-Hsuan Wang ซึ่งเป็นบริษัทในเครือของห้องปฏิบัติการวิทยาการคอมพิวเตอร์และปัญญาประดิษฐ์ ( CSAIL) ซึ่งเป็นหัวหน้านักวิจัยในโครงการนี้ “โดยพื้นฐานแล้ว มันช่วยให้เราเข้าใจกลยุทธ์ที่ดีที่สุดสำหรับหุ่นยนต์ในการโต้ตอบกับสภาพแวดล้อมของพวกเขา”
SoftZoo มีความครอบคลุมมากกว่าแพลตฟอร์มที่คล้ายกัน ซึ่งจำลองการออกแบบและการควบคุมอยู่แล้ว เนื่องจากเป็นการจำลองการเคลื่อนไหวที่ตอบสนองต่อลักษณะทางกายภาพของชีวนิเวศต่างๆ ความเก่งกาจของเฟรมเวิร์กมาจากเอ็นจิ้นมัลติฟิสิกส์ที่แตกต่างกัน ซึ่งช่วยให้สามารถจำลองหลายแง่มุมของระบบทางกายภาพได้ในเวลาเดียวกัน เช่น เบบี้ซีลที่กลายเป็นน้ำแข็ง หรือหนอนผีเสื้อที่กำลังเคลื่อนตัวข้ามสภาพแวดล้อมพื้นที่ชุ่มน้ำ ความแตกต่างของเครื่องยนต์ช่วยเพิ่มประสิทธิภาพการออกแบบร่วมโดยการลดจำนวนการจำลองที่มักมีราคาแพงซึ่งจำเป็นในการแก้ปัญหาการควบคุมและการออกแบบด้วยคอมพิวเตอร์ เป็นผลให้ผู้ใช้สามารถออกแบบและเคลื่อนย้ายซอฟต์โรบ็อตด้วยอัลกอริธึมเฉพาะที่ซับซ้อนยิ่งขึ้น
ความสามารถของระบบในการจำลองปฏิสัมพันธ์กับภูมิประเทศที่แตกต่างกัน แสดงให้เห็นถึงความสำคัญของสัณฐานวิทยา ซึ่งเป็นสาขาวิชาชีววิทยาที่ศึกษารูปร่าง ขนาด และรูปแบบของสิ่งมีชีวิตต่างๆ โครงสร้างทางชีววิทยาบางอย่างมีความเหมาะสมมากกว่าโครงสร้างอื่นๆ ขึ้นอยู่กับสภาพแวดล้อม เหมือนกับการเปรียบเทียบพิมพ์เขียวสำหรับเครื่องจักรที่ทำงานคล้ายกัน
เค้าโครงทางชีววิทยาเหล่านี้สามารถสร้างแรงบันดาลใจให้กับชีวิตประดิษฐ์เฉพาะทางที่จำเพาะเจาะจงมากขึ้น “รูปทรงเรขาคณิตที่เป็นลูกคลื่นอย่างนุ่มนวลของแมงกะพรุนช่วยให้มันเดินทางข้ามแหล่งน้ำขนาดใหญ่ได้อย่างมีประสิทธิภาพ เป็นแรงบันดาลใจให้นักวิจัยพัฒนาหุ่นยนต์แบบอ่อนสายพันธุ์ใหม่ และเปิดโอกาสที่เป็นไปได้อย่างไม่จำกัดในสิ่งที่สิ่งมีชีวิตเทียมที่เพาะเลี้ยงในซิลิโกสามารถทำได้” Wang กล่าว นอกจากนี้ แมลงปอยังสามารถเคลื่อนที่ได้อย่างว่องไวซึ่งสิ่งมีชีวิตบินอื่นๆ ไม่สามารถทำได้ เนื่องจากพวกมันมีโครงสร้างพิเศษบนปีก ซึ่งจะเปลี่ยนจุดศูนย์กลางมวลเมื่อบิน แพลตฟอร์มของเราเพิ่มประสิทธิภาพการเคลื่อนที่ในลักษณะเดียวกับที่แมลงปอสามารถทำงานผ่านสภาพแวดล้อมได้อย่างเป็นธรรมชาติมากขึ้น”
ก่อนหน้านี้หุ่นยนต์ต้องดิ้นรนเพื่อนำทางผ่านสภาพแวดล้อมที่รกเพราะร่างกายของพวกมันไม่สอดคล้องกับสภาพแวดล้อม อย่างไรก็ตาม ด้วย SoftZoo นักออกแบบสามารถพัฒนาสมองและร่างกายของหุ่นยนต์ไปพร้อมๆ กัน โดยร่วมเพิ่มประสิทธิภาพเครื่องจักรทั้งบนบกและในน้ำเพื่อให้มีการรับรู้และเชี่ยวชาญมากขึ้น ด้วยความฉลาดด้านพฤติกรรมและสัณฐานวิทยาที่เพิ่มขึ้น หุ่นยนต์จะมีประโยชน์มากขึ้นในการทำภารกิจช่วยเหลือและดำเนินการสำรวจให้สำเร็จ ตัวอย่างเช่น หากมีบุคคลสูญหายในระหว่างน้ำท่วม หุ่นยนต์อาจสามารถเดินทางข้ามน้ำได้อย่างมีประสิทธิภาพมากขึ้น เนื่องจากได้รับการปรับให้เหมาะสมโดยใช้วิธีการที่สาธิตในแพลตฟอร์ม SotftZoo
“SoftZoo นำเสนอการจำลองแบบโอเพ่นซอร์สสำหรับนักออกแบบหุ่นยนต์แบบอ่อน ช่วยให้พวกเขาสร้างหุ่นยนต์ในโลกแห่งความเป็นจริงได้ง่ายและยืดหยุ่นมากขึ้น ในขณะเดียวกันก็เร่งความสามารถในการเคลื่อนที่ของเครื่องจักรในสภาพแวดล้อมที่หลากหลาย” ผู้ร่วมเขียนการศึกษา Chuang Gan นักวิทยาศาสตร์การวิจัยของ MIT กล่าวเสริม -IBM Watson AI Lab ซึ่งเร็วๆ นี้จะเป็นผู้ช่วยศาสตราจารย์ที่ University of Massachusetts at Amherst
“แนวทางการคำนวณนี้เพื่อร่วมออกแบบตัวหุ่นยนต์แบบอ่อนและสมองของพวกมัน (ซึ่งก็คือตัวควบคุม) เปิดประตูสู่การสร้างเครื่องจักรที่ปรับแต่งตามความต้องการได้อย่างรวดเร็วซึ่งออกแบบมาเพื่องานเฉพาะ” Daniela Rus ผู้อำนวยการของ CSAIL และ Andrew และ ศาสตราจารย์ Erna Viterbi ในภาควิชาวิศวกรรมไฟฟ้าและวิทยาการคอมพิวเตอร์ (EECS) ของ MIT ซึ่งเป็นผู้เขียนผลงานอีกคน
ก่อนที่จะสร้างหุ่นยนต์ประเภทใดก็ตาม เฟรมเวิร์กอาจใช้แทนการทดสอบฉากที่ไม่เป็นธรรมชาติในภาคสนามได้ ตัวอย่างเช่น การประเมินว่าหุ่นยนต์ที่มีลักษณะคล้ายหมีมีพฤติกรรมอย่างไรในทะเลทรายอาจเป็นเรื่องยากสำหรับทีมวิจัยที่ทำงานในที่ราบในเมืองบอสตัน วิศวกรหุ่นยนต์แบบอ่อนสามารถใช้โมเดล 3 มิติใน SoftZoo เพื่อจำลองการออกแบบที่แตกต่างกัน และประเมินประสิทธิภาพของอัลกอริทึมในการควบคุมหุ่นยนต์ในการนำทาง ในทางกลับกัน วิธีนี้จะช่วยประหยัดเวลาและทรัพยากรของนักวิจัย
อย่างไรก็ตาม ข้อจำกัดของเทคนิคการผลิตในปัจจุบันยังคงเป็นอุปสรรคในการทำให้การออกแบบหุ่นยนต์แบบอ่อนเหล่านี้มีชีวิตขึ้นมา “การถ่ายโอนจากการจำลองไปยังหุ่นยนต์ทางกายภาพยังคงไม่ได้รับการแก้ไขและต้องมีการศึกษาเพิ่มเติม” Wang กล่าว “แบบจำลองของกล้ามเนื้อ ความแข็งที่แตกต่างกันเชิงพื้นที่ และการรับรู้ใน SoftZoo ไม่สามารถรับรู้ได้อย่างตรงไปตรงมาด้วยเทคนิคการผลิตในปัจจุบัน ดังนั้นเราจึงดำเนินการกับความท้าทายเหล่านี้”
ในอนาคต นักออกแบบของแพลตฟอร์มกำลังมองหาการใช้งานในกลไกของมนุษย์ เช่น การจัดการ เนื่องจากความสามารถในการทดสอบการควบคุมของหุ่นยนต์ เพื่อแสดงให้เห็นถึงศักยภาพนี้ ทีมงานของ Wang ได้ออกแบบแขนสามมิติเพื่อขว้างก้อนหิมะไปข้างหน้า
- เนื้อหาที่ขับเคลื่อนด้วย SEO และการเผยแพร่ประชาสัมพันธ์ รับการขยายวันนี้
- เพลโตไอสตรีม. ข้อมูลอัจฉริยะ Web3 ขยายความรู้ เข้าถึงได้ที่นี่.
- การสร้างอนาคตโดย Adryenn Ashley เข้าถึงได้ที่นี่.
- ที่มา: https://www.nanowerk.com/news2/robotics/newsid=62936.php
- :มี
- :เป็น
- :ไม่
- :ที่ไหน
- $ ขึ้น
- 10
- 11
- 12
- 8
- 9
- a
- ความสามารถ
- เร่ง
- บรรลุ
- ข้าม
- เพิ่ม
- บุญธรรม
- เข้าร่วม
- เปรียว
- AI
- อเล็กซ์
- อัลกอริทึม
- การอนุญาต
- ช่วยให้
- แล้ว
- an
- และ
- แอนดรู
- สัตว์
- อื่น
- ใด
- การใช้งาน
- เข้าใกล้
- เป็น
- ARM
- อาวุธ
- เทียม
- ปัญญาประดิษฐ์
- AS
- ด้าน
- การประเมิน
- ผู้ช่วย
- At
- ผู้เขียน
- อัตโนมัติ
- ทารก
- ตาม
- BE
- หมี
- เพราะ
- รับ
- ก่อน
- ที่ดีที่สุด
- ชีววิทยา
- ร่างกาย
- บอสตัน
- ทั้งสอง
- ของเล่นเพิ่มพัฒนาสมอง
- สมอง
- สาขา
- การนำ
- สร้าง
- การก่อสร้าง
- by
- CAN
- ไม่ได้
- ความสามารถในการ
- สามารถ
- ศูนย์
- ความท้าทาย
- ท้าทาย
- เปลี่ยนแปลง
- ผู้เขียนร่วม
- มา
- เปรียบเทียบ
- สมบูรณ์
- เสร็จสิ้น
- ไม่ขัดขืน
- ครอบคลุม
- คอมพิวเตอร์
- วิทยาการคอมพิวเตอร์
- การดำเนิน
- องค์ประกอบ
- ควบคุม
- การควบคุม
- ได้
- การสร้าง
- CSAIL
- ปัจจุบัน
- การปรับแต่ง
- วันที่
- สาธิต
- แสดงให้เห็นถึง
- แสดงให้เห็นถึง
- แผนก
- ทั้งนี้ขึ้นอยู่กับ
- ทะเลทราย
- ออกแบบ
- ได้รับการออกแบบ
- นักออกแบบ
- การออกแบบ
- แน่นอน
- พัฒนา
- พัฒนา
- ที่กำลังพัฒนา
- ต่าง
- ผู้อำนวยการ
- หลาย
- do
- ประตู
- แมลงปอ
- แมลงปอ
- ในระหว่าง
- อย่างง่ายดาย
- มีประสิทธิภาพ
- อย่างมีประสิทธิภาพ
- วิศวกรรมไฟฟ้า
- ช่วยให้
- เครื่องยนต์
- ชั้นเยี่ยม
- วิศวกร
- อย่างสิ้นเชิง
- สิ่งแวดล้อม
- สภาพแวดล้อม
- แก่นแท้
- ประเมินค่า
- แม้
- ตัวอย่าง
- แพง
- การสำรวจ
- คุณสมบัติ
- สนาม
- หา
- มีความยืดหยุ่น
- น้ำท่วม
- การบิน
- ดังต่อไปนี้
- สำหรับ
- รูปแบบ
- ข้างหน้า
- กรอบ
- ราคาเริ่มต้นที่
- ต่อไป
- อนาคต
- สร้าง
- เรขาคณิต
- กำหนด
- เข้าใจ
- มี
- ช่วย
- การช่วยเหลือ
- จะช่วยให้
- สรุป ความน่าเชื่อถือของ Olymp Trade?
- HTTPS
- เป็นมนุษย์
- ICE
- if
- แสดงให้เห็นถึง
- ภาพ
- ความสำคัญ
- การปรับปรุง
- in
- รวมทั้ง
- เพิ่มขึ้น
- แรงบันดาลใจ
- สร้างแรงบันดาลใจ
- ที่เร้าใจ
- แทน
- Intelligence
- โต้ตอบ
- ปฏิสัมพันธ์
- IT
- ITS
- jpg
- ห้องปฏิบัติการ
- ห้องปฏิบัติการ
- ใหญ่
- นำ
- ชีวิต
- กดไลก์
- ข้อ จำกัด
- ดู
- ดูเหมือน
- เครื่อง
- การจัดการ
- หลาย
- มวล
- แมสซาชูเซต
- อาจ..
- วิธี
- กลศาสตร์
- วิธีการ
- กลาง
- หายไป
- ภารกิจ
- เอ็มไอที
- โมเดล
- ข้อมูลเพิ่มเติม
- การเคลื่อนไหว
- ย้าย
- การเคลื่อนไหว
- มาก
- นำทาง
- การเดินเรือ
- ใหม่
- จำนวน
- วัตถุ
- of
- มักจะ
- on
- ONE
- โอเพนซอร์ส
- การเปิด
- เปิด
- ดีที่สุด
- การปรับให้เหมาะสม
- เพิ่มประสิทธิภาพ
- การเพิ่มประสิทธิภาพ
- or
- อื่นๆ
- ผลิตภัณฑ์อื่นๆ
- ของเรา
- โครงร่าง
- เส้นทาง
- ดำเนินการ
- การปฏิบัติ
- คน
- กายภาพ
- เวที
- แพลตฟอร์ม
- เพลโต
- เพลโตดาต้าอินเทลลิเจนซ์
- เพลโตดาต้า
- ความเป็นไปได้
- ที่มีศักยภาพ
- ที่อาจเกิดขึ้น
- ก่อนหน้านี้
- ปัญหาที่เกิดขึ้น
- ศาสตราจารย์
- โครงการ
- ให้
- ใส่
- อย่างรวดเร็ว
- ตอบสนอง
- โลกแห่งความจริง
- ตระหนัก
- ลด
- ภูมิภาค
- การฟื้นฟูสมรรถภาพ
- ซากศพ
- จำเป็นต้องใช้
- ต้อง
- ช่วยเหลือ
- การวิจัย
- นักวิจัย
- นักวิจัย
- แหล่งข้อมูล
- ผล
- หุ่นยนต์
- หุ่นยนต์
- หุ่นยนต์
- เดียวกัน
- ลด
- พูดว่า
- ฉาก
- วิทยาศาสตร์
- นักวิทยาศาสตร์
- ค้นหา
- หลาย
- รูปร่าง
- รูปร่าง
- ฉลาม
- ด้าน
- คล้ายคลึงกัน
- จำลอง
- พร้อมกัน
- ตั้งแต่
- ขนาด
- หิมะ
- So
- อ่อน
- แก้
- บาง
- ในไม่ช้า
- ซับซ้อน
- แหล่ง
- ช่องว่าง
- พิเศษ
- เฉพาะ
- โดยเฉพาะ
- ที่ระบุไว้
- กอง
- ยืน
- ขั้นตอน
- ยังคง
- กลยุทธ์
- นักเรียน
- การศึกษา
- ศึกษา
- อย่างเช่น
- ระบบ
- การ
- เป้า
- งาน
- งาน
- ทีม
- เทคนิค
- บนพื้นดิน
- ทดสอบ
- การทดสอบ
- กว่า
- ที่
- พื้นที่
- ก้าวสู่อนาคต
- ของพวกเขา
- พวกเขา
- แล้วก็
- ล้อยางขัดเหล่านี้ติดตั้งบนแกน XNUMX (มม.) ผลิตภัณฑ์นี้ถูกผลิตในหลายรูปทรง และหลากหลายเบอร์ความแน่นหนาของปริมาณอนุภาคขัดของมัน จะทำให้ท่านได้รับประสิทธิภาพสูงในการขัดและการใช้งานที่ยาวนาน
- พวกเขา
- สิ่ง
- นี้
- แต่?
- ตลอด
- การขว้างปา
- เวลา
- ไปยัง
- การเดินทาง
- กลับ
- การหมุน
- ชนิด
- เข้าใจ
- มหาวิทยาลัย
- ไม่ จำกัด
- ในเมือง
- us
- ใช้
- ผู้ใช้
- การใช้
- ต่างๆ
- มาก
- คือ
- น้ำดื่ม
- น่านน้ำ
- วัตสัน
- ทาง..
- we
- คือ
- อะไร
- เมื่อ
- ว่า
- ที่
- ในขณะที่
- WHO
- ป่า
- ธรรมชาติ
- จะ
- กับ
- งาน
- การทำงาน
- จะ
- ลมทะเล
เพิ่มเติมจาก นาโนเวิร์ค

นักวิทยาศาสตร์ค้นพบวิธีการใหม่ในการสร้างอนุภาคนาโนของโลหะเพื่อใช้เป็นตัวเร่งปฏิกิริยา
โหนดต้นทาง: 3039388
ประทับเวลา: ธันวาคม 28, 2023

หุ่นยนต์ผึ้งและรากไม้มอบความหวังในสภาพแวดล้อมที่ดีต่อสุขภาพและอาหารที่เพียงพอ
โหนดต้นทาง: 1977685
ประทับเวลา: กุมภาพันธ์ 25, 2023

Neuromorphic synapse สร้างขึ้นจากวัสดุหลักสำหรับทีวี OLED
โหนดต้นทาง: 2541090
ประทับเวลา: Mar 24, 2023

เร่งเซมิคอนดักเตอร์ที่ยั่งยืนด้วย 'หมึกหลายองค์ประกอบ'
โหนดต้นทาง: 2911790
ประทับเวลา: กันยายน 28, 2023
ตัวเร่งปฏิกิริยานาโนพลังงานแสงเพื่อสร้างไฮโดรเจนโดยใช้แสงแดด
โหนดต้นทาง: 3053672
ประทับเวลา: ม.ค. 10, 2024
นักวิทยาศาสตร์สังเกตเห็นการเปลี่ยนแปลงไปสู่พฤติกรรมที่วุ่นวายในระดับนาโนเมตร
โหนดต้นทาง: 1982382
ประทับเวลา: กุมภาพันธ์ 27, 2023

หุ่นยนต์และ AI ร่วมมือกันเพื่อค้นหาตัวเร่งปฏิกิริยาที่คัดเลือกมาเป็นอย่างดี
โหนดต้นทาง: 1940293
ประทับเวลา: กุมภาพันธ์ 3, 2023