03 maj 2023 (Nanowerk Nyheter) Sedan termen "mjuk robotik" antogs 2008, har ingenjörer inom området byggt olika representationer av flexibla maskiner användbara inom utforskning, förflyttning, rehabilitering och till och med rymden. En inspirationskälla: hur djur rör sig i naturen.
Ett team av MIT-forskare har tagit detta ett steg längre och utvecklat SoftZoo, en bioinspirerad plattform som gör det möjligt för ingenjörer att studera mjuk robotsamdesign. Ramverket optimerar algoritmer som består av design, som avgör hur roboten kommer att se ut; och kontroll, eller systemet som möjliggör robotrörelse, vilket förbättrar hur användare automatiskt genererar konturer för potentiella maskiner.
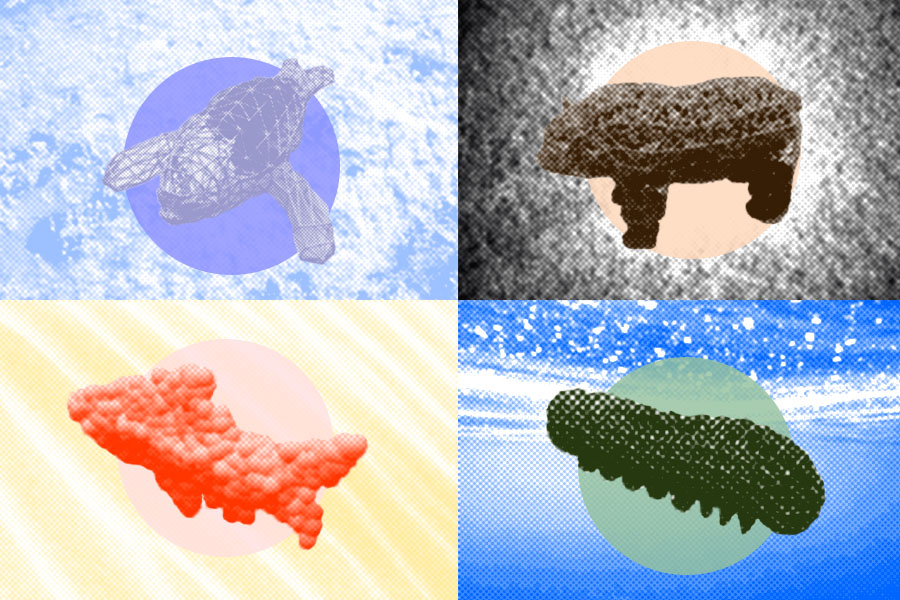 Forskare utvecklade ett system för mjuk robotsamdesign, vilket innebär att man gemensamt söker och optimerar för robotdesign — robotens form, var man ska lägga muskler i robotkroppen, hur mjuk roboten är i olika kroppsregioner; och baserat på robotdesignen, sättet att styra den för att uppnå en måluppgift. (Bild: Alex Shipps/MIT CSAIL och forskarna)
Med en promenad på den vilda sidan har plattformen 3D-modeller av djur som pandabjörnar, fiskar, hajar och larver som design som kan simulera mjuka robotuppgifter som förflyttning, smidig svängning och vägföljning i olika miljöer. Oavsett om det är snö, öken, lera eller vatten, demonstrerar plattformen prestandaavvägningarna mellan olika konstruktioner i olika terränger.
"Vårt ramverk kan hjälpa användare att hitta den bästa konfigurationen för en robots form, så att de kan designa mjuka robotalgoritmer som kan göra många olika saker", säger MIT doktorand Tsun-Hsuan Wang, en filial till Computer Science and Artificial Intelligence Laboratory ( CSAIL) som är ledande forskare i projektet. "I huvudsak hjälper det oss att förstå de bästa strategierna för robotar att interagera med sina miljöer."
SoftZoo är mer omfattande än liknande plattformar, som redan simulerar design och kontroll, eftersom det modellerar rörelser som reagerar på de fysiska egenskaperna hos olika biomer. Ramverkets mångsidighet kommer från en differentierbar multifysikmotor, som möjliggör simulering av flera aspekter av ett fysiskt system samtidigt, till exempel en sälunge som vänder sig mot is eller en larv som rör sig över en våtmarksmiljö. Motorns differentierbarhet optimerar samdesign genom att minska antalet ofta dyra simuleringar som krävs för att lösa beräkningsstyrnings- och designproblem. Som ett resultat kan användare designa och flytta mjuka robotar med mer sofistikerade, specificerade algoritmer.
Systemets förmåga att simulera interaktioner med olika terräng illustrerar betydelsen av morfologi, en gren av biologin som studerar olika organismers former, storlekar och former. Beroende på miljön är vissa biologiska strukturer mer optimala än andra, ungefär som att jämföra ritningar för maskiner som utför liknande uppgifter.
Dessa biologiska konturer kan inspirera till mer specialiserat, terrängspecifikt artificiellt liv. "En manets mjukt böljande geometri gör att den effektivt kan resa över stora vattendrag, vilket inspirerar forskare att utveckla nya raser av mjuka robotar och öppnar upp för obegränsade möjligheter för vad konstgjorda varelser odlade helt i silico kan vara kapabla till", säger Wang. "Dessutom kan trollsländor utföra mycket smidiga manövrar som andra flygande varelser inte kan genomföra eftersom de har speciella strukturer på sina vingar som ändrar deras massacentrum när de flyger. Vår plattform optimerar förflyttning på samma sätt som en trollslända naturligtvis är skickligare på att arbeta genom sin omgivning.”
Robotar kämpade tidigare för att navigera genom röriga miljöer eftersom deras kroppar inte var kompatibla med sin omgivning. Men med SoftZoo kunde designers utveckla robotens hjärna och kropp samtidigt, samtidigt optimera både land- och vattenmaskiner för att bli mer medvetna och specialiserade. Med ökad beteendemässig och morfologisk intelligens skulle robotarna då vara mer användbara för att slutföra räddningsuppdrag och genomföra utforskning. Om en person försvann under en översvämning, till exempel, skulle roboten potentiellt kunna korsa vattnet mer effektivt eftersom den optimerades med metoder som demonstrerades i SotftZoo-plattformen.
"SoftZoo tillhandahåller simulering med öppen källkod för mjuka robotdesigners, vilket hjälper dem att bygga verkliga robotar mycket enklare och mer flexibelt samtidigt som de accelererar maskinernas förflyttningsförmåga i olika miljöer," tillägger studiens medförfattare Chuang Gan, en forskare vid MIT -IBM Watson AI Lab som snart blir biträdande professor vid University of Massachusetts i Amherst.
"Denna beräkningsmetod för att samdesigna de mjuka robotkropparna och deras hjärnor (det vill säga deras kontroller) öppnar dörren till att snabbt skapa skräddarsydda maskiner som är designade för en specifik uppgift", tillägger Daniela Rus, chef för CSAIL och Andrew och Erna Viterbi Professor vid MIT Department of Electrical Engineering and Computer Science (EECS), som är en annan författare till verket.
Innan någon typ av robot konstrueras kan ramverket vara ett substitut för fälttestning av onaturliga scener. Att bedöma hur en björnliknande robot beter sig i en öken kan till exempel vara en utmaning för ett forskarlag som arbetar i Bostons urbana slätter. Istället kunde mjuka robottekniker använda 3D-modeller i SoftZoo för att simulera olika konstruktioner och utvärdera hur effektiva algoritmerna som styr deras robotar är vid navigering. Detta skulle i sin tur spara tid och resurser för forskare.
Ändå står begränsningarna för nuvarande tillverkningstekniker i vägen för att levandegöra dessa mjuka robotdesigner. "Överföring från simulering till fysisk robot förblir olöst och kräver ytterligare studier", säger Wang. "Muskelmodellerna, rumsligt varierande styvhet och sensorisering i SoftZoo kan inte realiseras direkt med nuvarande tillverkningstekniker, så vi arbetar med dessa utmaningar."
I framtiden tittar plattformens designers på tillämpningar inom mänsklig mekanik, såsom manipulation, med tanke på dess förmåga att testa robotstyrning. För att visa denna potential designade Wangs team en 3D-arm som kastar en snöboll framåt.
Forskare utvecklade ett system för mjuk robotsamdesign, vilket innebär att man gemensamt söker och optimerar för robotdesign — robotens form, var man ska lägga muskler i robotkroppen, hur mjuk roboten är i olika kroppsregioner; och baserat på robotdesignen, sättet att styra den för att uppnå en måluppgift. (Bild: Alex Shipps/MIT CSAIL och forskarna)
Med en promenad på den vilda sidan har plattformen 3D-modeller av djur som pandabjörnar, fiskar, hajar och larver som design som kan simulera mjuka robotuppgifter som förflyttning, smidig svängning och vägföljning i olika miljöer. Oavsett om det är snö, öken, lera eller vatten, demonstrerar plattformen prestandaavvägningarna mellan olika konstruktioner i olika terränger.
"Vårt ramverk kan hjälpa användare att hitta den bästa konfigurationen för en robots form, så att de kan designa mjuka robotalgoritmer som kan göra många olika saker", säger MIT doktorand Tsun-Hsuan Wang, en filial till Computer Science and Artificial Intelligence Laboratory ( CSAIL) som är ledande forskare i projektet. "I huvudsak hjälper det oss att förstå de bästa strategierna för robotar att interagera med sina miljöer."
SoftZoo är mer omfattande än liknande plattformar, som redan simulerar design och kontroll, eftersom det modellerar rörelser som reagerar på de fysiska egenskaperna hos olika biomer. Ramverkets mångsidighet kommer från en differentierbar multifysikmotor, som möjliggör simulering av flera aspekter av ett fysiskt system samtidigt, till exempel en sälunge som vänder sig mot is eller en larv som rör sig över en våtmarksmiljö. Motorns differentierbarhet optimerar samdesign genom att minska antalet ofta dyra simuleringar som krävs för att lösa beräkningsstyrnings- och designproblem. Som ett resultat kan användare designa och flytta mjuka robotar med mer sofistikerade, specificerade algoritmer.
Systemets förmåga att simulera interaktioner med olika terräng illustrerar betydelsen av morfologi, en gren av biologin som studerar olika organismers former, storlekar och former. Beroende på miljön är vissa biologiska strukturer mer optimala än andra, ungefär som att jämföra ritningar för maskiner som utför liknande uppgifter.
Dessa biologiska konturer kan inspirera till mer specialiserat, terrängspecifikt artificiellt liv. "En manets mjukt böljande geometri gör att den effektivt kan resa över stora vattendrag, vilket inspirerar forskare att utveckla nya raser av mjuka robotar och öppnar upp för obegränsade möjligheter för vad konstgjorda varelser odlade helt i silico kan vara kapabla till", säger Wang. "Dessutom kan trollsländor utföra mycket smidiga manövrar som andra flygande varelser inte kan genomföra eftersom de har speciella strukturer på sina vingar som ändrar deras massacentrum när de flyger. Vår plattform optimerar förflyttning på samma sätt som en trollslända naturligtvis är skickligare på att arbeta genom sin omgivning.”
Robotar kämpade tidigare för att navigera genom röriga miljöer eftersom deras kroppar inte var kompatibla med sin omgivning. Men med SoftZoo kunde designers utveckla robotens hjärna och kropp samtidigt, samtidigt optimera både land- och vattenmaskiner för att bli mer medvetna och specialiserade. Med ökad beteendemässig och morfologisk intelligens skulle robotarna då vara mer användbara för att slutföra räddningsuppdrag och genomföra utforskning. Om en person försvann under en översvämning, till exempel, skulle roboten potentiellt kunna korsa vattnet mer effektivt eftersom den optimerades med metoder som demonstrerades i SotftZoo-plattformen.
"SoftZoo tillhandahåller simulering med öppen källkod för mjuka robotdesigners, vilket hjälper dem att bygga verkliga robotar mycket enklare och mer flexibelt samtidigt som de accelererar maskinernas förflyttningsförmåga i olika miljöer," tillägger studiens medförfattare Chuang Gan, en forskare vid MIT -IBM Watson AI Lab som snart blir biträdande professor vid University of Massachusetts i Amherst.
"Denna beräkningsmetod för att samdesigna de mjuka robotkropparna och deras hjärnor (det vill säga deras kontroller) öppnar dörren till att snabbt skapa skräddarsydda maskiner som är designade för en specifik uppgift", tillägger Daniela Rus, chef för CSAIL och Andrew och Erna Viterbi Professor vid MIT Department of Electrical Engineering and Computer Science (EECS), som är en annan författare till verket.
Innan någon typ av robot konstrueras kan ramverket vara ett substitut för fälttestning av onaturliga scener. Att bedöma hur en björnliknande robot beter sig i en öken kan till exempel vara en utmaning för ett forskarlag som arbetar i Bostons urbana slätter. Istället kunde mjuka robottekniker använda 3D-modeller i SoftZoo för att simulera olika konstruktioner och utvärdera hur effektiva algoritmerna som styr deras robotar är vid navigering. Detta skulle i sin tur spara tid och resurser för forskare.
Ändå står begränsningarna för nuvarande tillverkningstekniker i vägen för att levandegöra dessa mjuka robotdesigner. "Överföring från simulering till fysisk robot förblir olöst och kräver ytterligare studier", säger Wang. "Muskelmodellerna, rumsligt varierande styvhet och sensorisering i SoftZoo kan inte realiseras direkt med nuvarande tillverkningstekniker, så vi arbetar med dessa utmaningar."
I framtiden tittar plattformens designers på tillämpningar inom mänsklig mekanik, såsom manipulation, med tanke på dess förmåga att testa robotstyrning. För att visa denna potential designade Wangs team en 3D-arm som kastar en snöboll framåt.
Forskare utvecklade ett system för mjuk robotsamdesign, vilket innebär att man gemensamt söker och optimerar för robotdesign — robotens form, var man ska lägga muskler i robotkroppen, hur mjuk roboten är i olika kroppsregioner; och baserat på robotdesignen, sättet att styra den för att uppnå en måluppgift. (Bild: Alex Shipps/MIT CSAIL och forskarna)
Med en promenad på den vilda sidan har plattformen 3D-modeller av djur som pandabjörnar, fiskar, hajar och larver som design som kan simulera mjuka robotuppgifter som förflyttning, smidig svängning och vägföljning i olika miljöer. Oavsett om det är snö, öken, lera eller vatten, demonstrerar plattformen prestandaavvägningarna mellan olika konstruktioner i olika terränger.
"Vårt ramverk kan hjälpa användare att hitta den bästa konfigurationen för en robots form, så att de kan designa mjuka robotalgoritmer som kan göra många olika saker", säger MIT doktorand Tsun-Hsuan Wang, en filial till Computer Science and Artificial Intelligence Laboratory ( CSAIL) som är ledande forskare i projektet. "I huvudsak hjälper det oss att förstå de bästa strategierna för robotar att interagera med sina miljöer."
SoftZoo är mer omfattande än liknande plattformar, som redan simulerar design och kontroll, eftersom det modellerar rörelser som reagerar på de fysiska egenskaperna hos olika biomer. Ramverkets mångsidighet kommer från en differentierbar multifysikmotor, som möjliggör simulering av flera aspekter av ett fysiskt system samtidigt, till exempel en sälunge som vänder sig mot is eller en larv som rör sig över en våtmarksmiljö. Motorns differentierbarhet optimerar samdesign genom att minska antalet ofta dyra simuleringar som krävs för att lösa beräkningsstyrnings- och designproblem. Som ett resultat kan användare designa och flytta mjuka robotar med mer sofistikerade, specificerade algoritmer.
Systemets förmåga att simulera interaktioner med olika terräng illustrerar betydelsen av morfologi, en gren av biologin som studerar olika organismers former, storlekar och former. Beroende på miljön är vissa biologiska strukturer mer optimala än andra, ungefär som att jämföra ritningar för maskiner som utför liknande uppgifter.
Dessa biologiska konturer kan inspirera till mer specialiserat, terrängspecifikt artificiellt liv. "En manets mjukt böljande geometri gör att den effektivt kan resa över stora vattendrag, vilket inspirerar forskare att utveckla nya raser av mjuka robotar och öppnar upp för obegränsade möjligheter för vad konstgjorda varelser odlade helt i silico kan vara kapabla till", säger Wang. "Dessutom kan trollsländor utföra mycket smidiga manövrar som andra flygande varelser inte kan genomföra eftersom de har speciella strukturer på sina vingar som ändrar deras massacentrum när de flyger. Vår plattform optimerar förflyttning på samma sätt som en trollslända naturligtvis är skickligare på att arbeta genom sin omgivning.”
Robotar kämpade tidigare för att navigera genom röriga miljöer eftersom deras kroppar inte var kompatibla med sin omgivning. Men med SoftZoo kunde designers utveckla robotens hjärna och kropp samtidigt, samtidigt optimera både land- och vattenmaskiner för att bli mer medvetna och specialiserade. Med ökad beteendemässig och morfologisk intelligens skulle robotarna då vara mer användbara för att slutföra räddningsuppdrag och genomföra utforskning. Om en person försvann under en översvämning, till exempel, skulle roboten potentiellt kunna korsa vattnet mer effektivt eftersom den optimerades med metoder som demonstrerades i SotftZoo-plattformen.
"SoftZoo tillhandahåller simulering med öppen källkod för mjuka robotdesigners, vilket hjälper dem att bygga verkliga robotar mycket enklare och mer flexibelt samtidigt som de accelererar maskinernas förflyttningsförmåga i olika miljöer," tillägger studiens medförfattare Chuang Gan, en forskare vid MIT -IBM Watson AI Lab som snart blir biträdande professor vid University of Massachusetts i Amherst.
"Denna beräkningsmetod för att samdesigna de mjuka robotkropparna och deras hjärnor (det vill säga deras kontroller) öppnar dörren till att snabbt skapa skräddarsydda maskiner som är designade för en specifik uppgift", tillägger Daniela Rus, chef för CSAIL och Andrew och Erna Viterbi Professor vid MIT Department of Electrical Engineering and Computer Science (EECS), som är en annan författare till verket.
Innan någon typ av robot konstrueras kan ramverket vara ett substitut för fälttestning av onaturliga scener. Att bedöma hur en björnliknande robot beter sig i en öken kan till exempel vara en utmaning för ett forskarlag som arbetar i Bostons urbana slätter. Istället kunde mjuka robottekniker använda 3D-modeller i SoftZoo för att simulera olika konstruktioner och utvärdera hur effektiva algoritmerna som styr deras robotar är vid navigering. Detta skulle i sin tur spara tid och resurser för forskare.
Ändå står begränsningarna för nuvarande tillverkningstekniker i vägen för att levandegöra dessa mjuka robotdesigner. "Överföring från simulering till fysisk robot förblir olöst och kräver ytterligare studier", säger Wang. "Muskelmodellerna, rumsligt varierande styvhet och sensorisering i SoftZoo kan inte realiseras direkt med nuvarande tillverkningstekniker, så vi arbetar med dessa utmaningar."
I framtiden tittar plattformens designers på tillämpningar inom mänsklig mekanik, såsom manipulation, med tanke på dess förmåga att testa robotstyrning. För att visa denna potential designade Wangs team en 3D-arm som kastar en snöboll framåt.
- SEO-drivet innehåll och PR-distribution. Bli förstärkt idag.
- PlatoAiStream. Web3 Data Intelligence. Kunskap förstärkt. Tillgång här.
- Minting the Future med Adryenn Ashley. Tillgång här.
- Källa: https://www.nanowerk.com/news2/robotics/newsid=62936.php
- : har
- :är
- :inte
- :var
- $UPP
- 10
- 11
- 12
- 8
- 9
- a
- förmåga
- accelererande
- Uppnå
- tvärs
- Lägger
- antagen
- Dotterbolag
- smidig
- AI
- alex
- algoritmer
- tillåta
- tillåter
- redan
- an
- och
- Andrew
- djur
- Annan
- vilken som helst
- tillämpningar
- tillvägagångssätt
- ÄR
- ARM
- armar
- konstgjord
- artificiell intelligens
- AS
- aspekter
- bedöma
- Assistent
- At
- Författaren
- automatiskt
- Bebis
- baserat
- BE
- bears
- därför att
- varit
- innan
- BÄST
- biologi
- kropp
- boston
- båda
- Hjärna
- Hjärnorna
- Branch
- Föra
- SLUTRESULTAT
- Byggnad
- by
- KAN
- kan inte
- kapacitet
- kapabel
- Centrum
- utmaningar
- utmanande
- byta
- Medförfattare
- kommer
- jämförande
- fullborda
- fullborda
- kompatibel
- omfattande
- dator
- Datavetenskap
- ledande
- konfiguration
- kontroll
- styrning
- kunde
- Skapa
- CSAIL
- Aktuella
- kundanpassad
- Datum
- demonstrera
- demonstreras
- demonstrerar
- Avdelning
- beroende
- ÖKEN
- Designa
- utformade
- konstruktörer
- mönster
- bestämd
- utveckla
- utvecklade
- utveckla
- olika
- Direktör
- flera
- do
- Dörr
- Trollsländor
- Trollslända
- under
- lätt
- Effektiv
- effektivt
- elektroteknik
- möjliggör
- Motor
- Teknik
- Ingenjörer
- helt
- Miljö
- miljöer
- huvudsak
- utvärdera
- Även
- exempel
- dyra
- utforskning
- Funktioner
- fält
- hitta
- flexibel
- översvämning
- flygande
- efter
- För
- former
- Framåt
- Ramverk
- från
- ytterligare
- framtida
- generera
- geometri
- ges
- grepp
- Har
- hjälpa
- hjälpa
- hjälper
- Hur ser din drömresa ut
- HTTPS
- humant
- IS
- if
- illustrerar
- bild
- vikt
- förbättra
- in
- Inklusive
- ökat
- Inspiration
- inspirerar
- inspirerande
- istället
- Intelligens
- interagera
- interaktioner
- IT
- DESS
- jpg
- lab
- laboratorium
- Large
- leda
- livet
- tycka om
- begränsningar
- se
- ser ut som
- Maskiner
- Manipulation
- många
- Massa
- massachusetts
- Maj..
- betyder
- mekanik
- metoder
- Mitten
- saknas
- uppdrag
- MIT
- modeller
- mer
- rörelse
- flytta
- rörelse
- mycket
- Navigera
- Navigering
- Nya
- antal
- objekt
- of
- Ofta
- on
- ONE
- öppen källkod
- öppning
- öppnas
- optimala
- optimerad
- optimerar
- optimera
- or
- Övriga
- Övrigt
- vår
- konturer
- bana
- utföra
- prestanda
- personen
- fysisk
- plattform
- Plattformar
- plato
- Platon Data Intelligence
- PlatonData
- Möjligheterna
- potentiell
- potentiellt
- tidigare
- problem
- Professor
- projektet
- ger
- sätta
- snabbt
- reagerar
- verkliga världen
- insåg
- reducerande
- regioner
- rehabilitering
- resterna
- Obligatorisk
- Kräver
- rädda
- forskning
- forskaren
- forskare
- Resurser
- resultera
- Roboten
- robotik
- robotar
- Samma
- Save
- säger
- scener
- Vetenskap
- Forskare
- söka
- flera
- Forma
- former
- Sharks
- sida
- liknande
- simulering
- samtidigt
- eftersom
- storlekar
- snö
- So
- Mjuk
- LÖSA
- några
- Alldeles strax
- sofistikerade
- Källa
- Utrymme
- speciell
- specialiserad
- specifik
- specificerade
- stapel
- stå
- Steg
- Fortfarande
- strategier
- student
- studier
- Läsa på
- sådana
- system
- tar
- Målet
- uppgift
- uppgifter
- grupp
- tekniker
- markbundna
- testa
- Testning
- än
- den där
- Smakämnen
- Framtiden
- deras
- Dem
- sedan
- Dessa
- de
- saker
- detta
- fastän?
- Genom
- Kasta
- tid
- till
- färdas
- SVÄNG
- Vrida
- Typ
- förstå
- universitet
- obegränsat
- urbana
- us
- användning
- användare
- med hjälp av
- olika
- mycket
- var
- Vatten
- Vatten
- Watson
- Sätt..
- we
- były
- Vad
- när
- om
- som
- medan
- VEM
- Vild
- Djurliv
- kommer
- med
- Arbete
- arbetssätt
- skulle
- zephyrnet
Mer från Nanoverk

Forskare upptäcker en ny metod för att generera metallnanopartiklar för användning som katalysatorer
Källnod: 3039388
Tidsstämpel: December 28, 2023

Att vägleda designen av silikonenheter med förbättrad effektivitet
Källnod: 2839986
Tidsstämpel: Augusti 23, 2023
Robotbin och rötter ger hopp om en hälsosammare miljö och tillräckligt med mat
Källnod: 1977685
Tidsstämpel: Februari 25, 2023

Kolmaterial i nanostorlek kan användas för att behandla Downs syndrom
Källnod: 2778869
Tidsstämpel: Juli 21, 2023

Accelererar hållbara halvledare med "multielement bläck"
Källnod: 2911790
Tidsstämpel: September 28, 2023
Ljusdriven nanokatalysator för att göra väte med hjälp av solljus
Källnod: 3053672
Tidsstämpel: Jan 10, 2024
Forskare observerar övergången till kaotiskt beteende på nanometerskalan
Källnod: 1982382
Tidsstämpel: Februari 27, 2023

Robotar och AI går ihop för att upptäcka mycket selektiva katalysatorer
Källnod: 1940293
Tidsstämpel: Februari 3, 2023